Traffic Light Controller Design: ELEC2141 Assignment Solution
VerifiedAdded on 2023/04/06
|13
|839
|100
Project
AI Summary
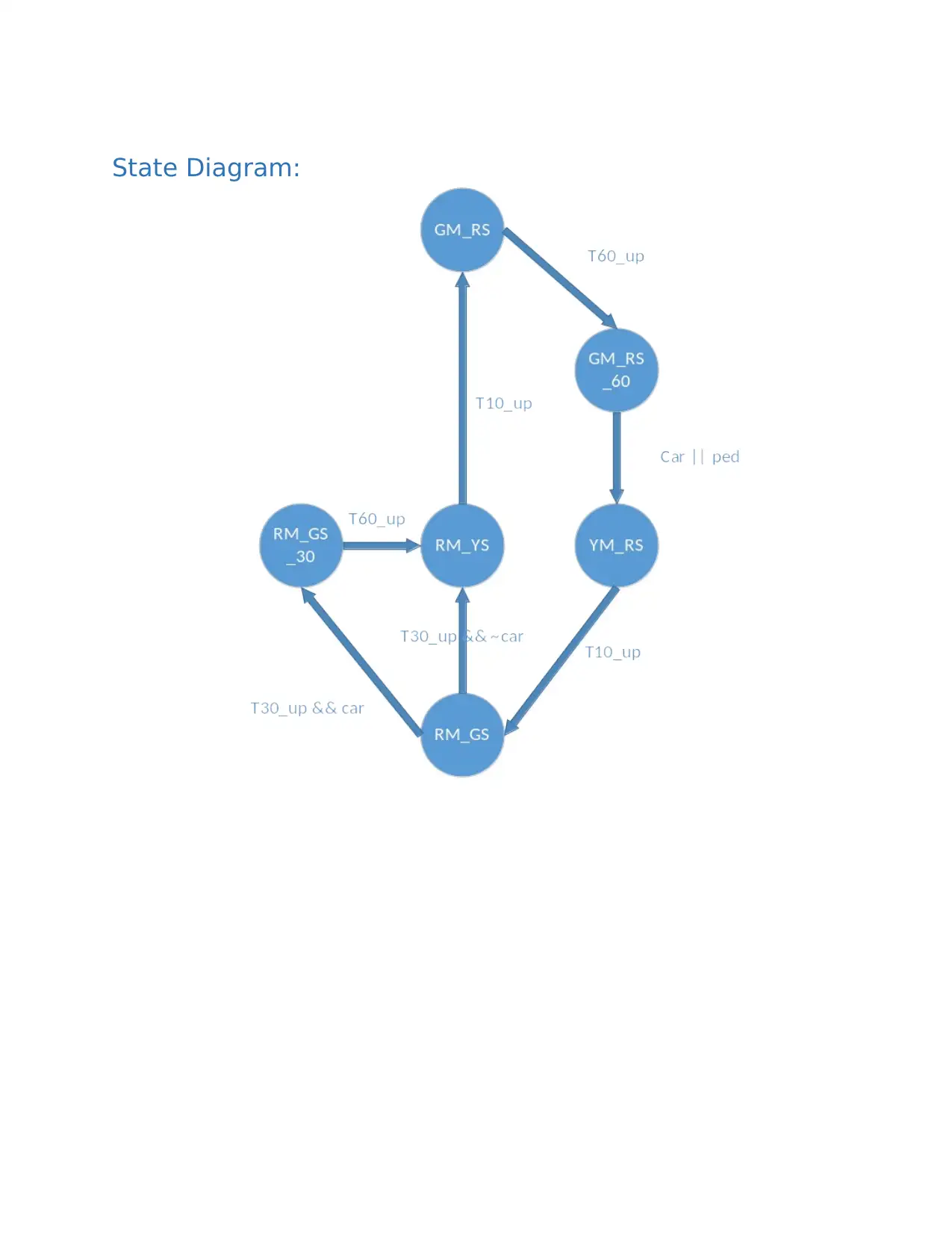
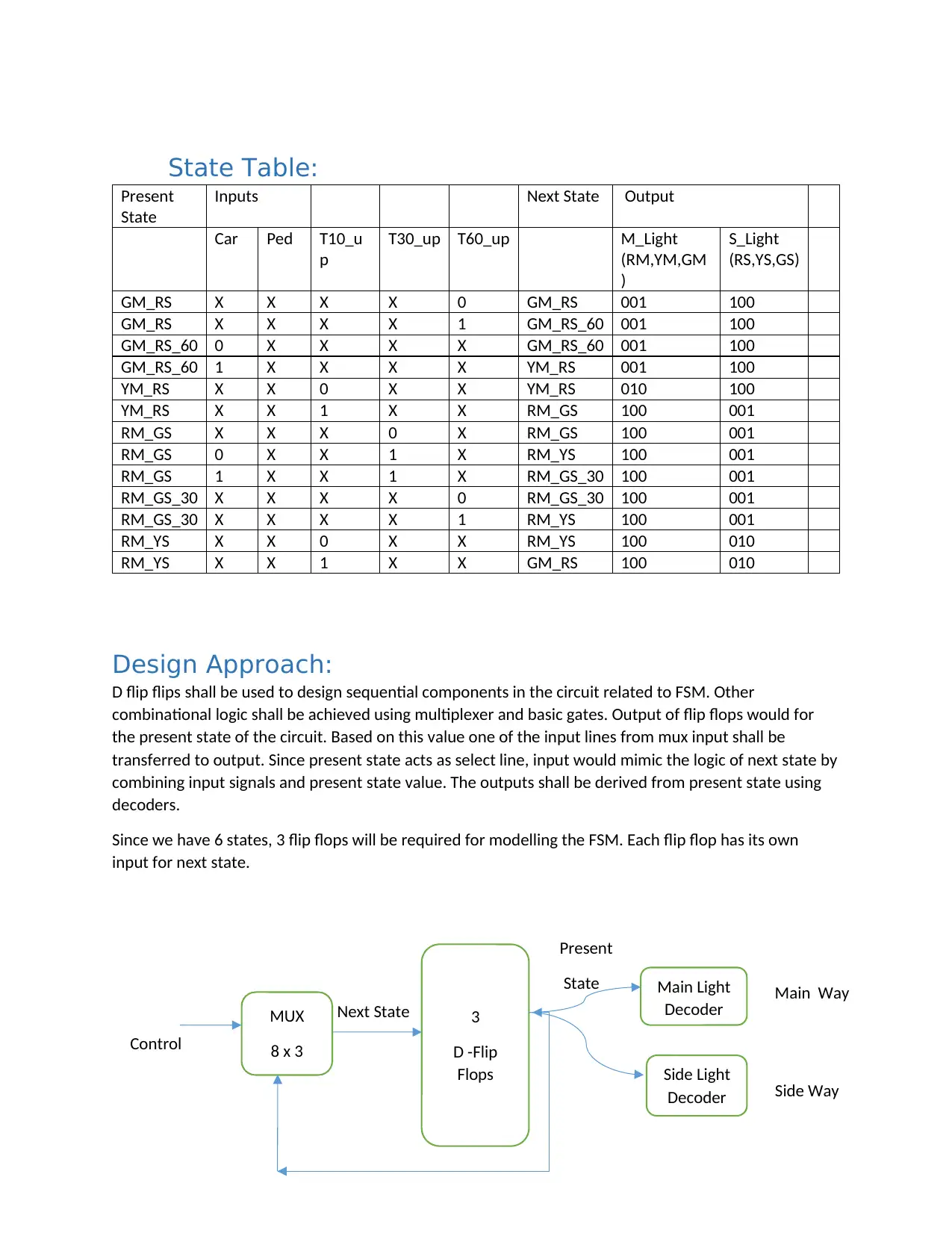
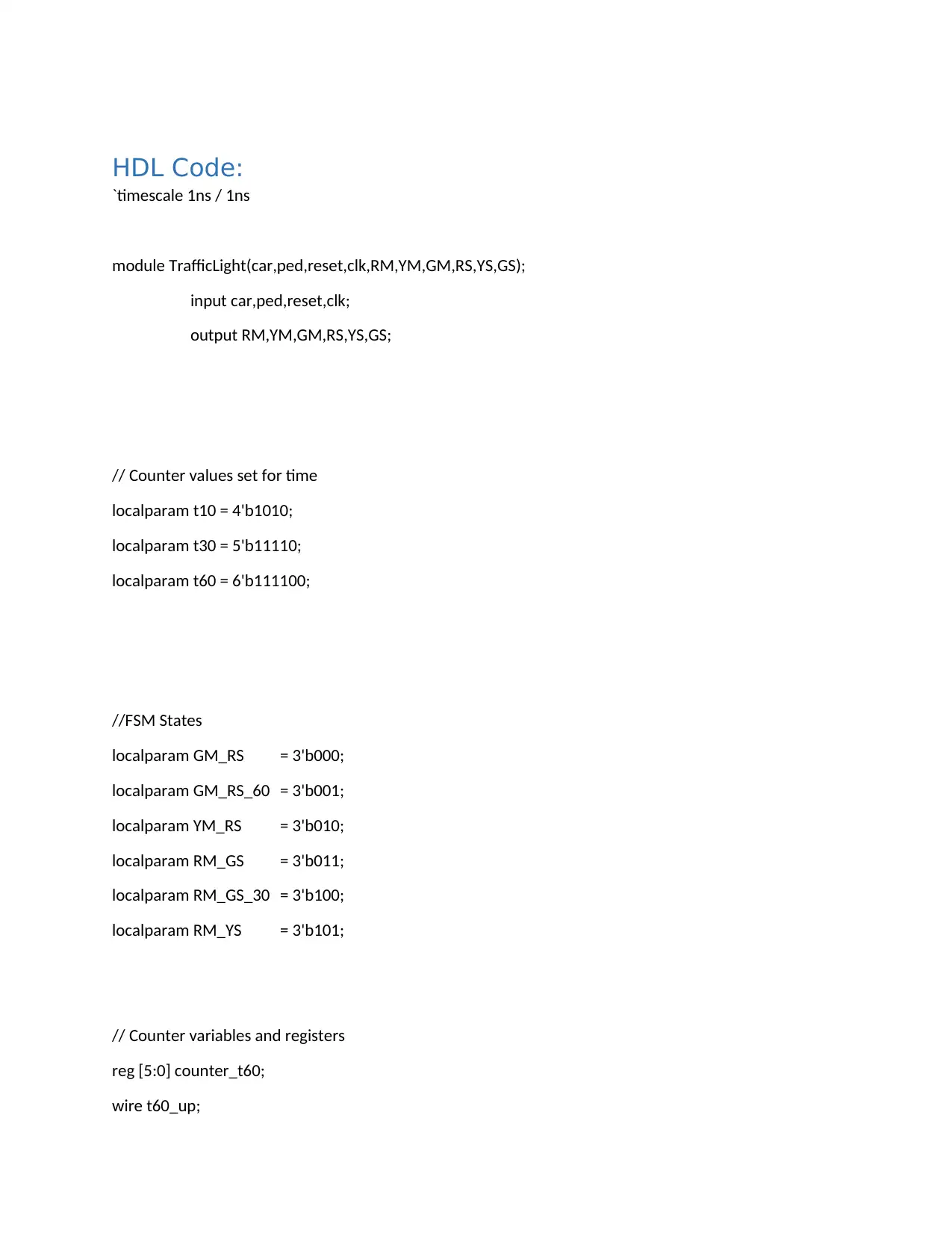
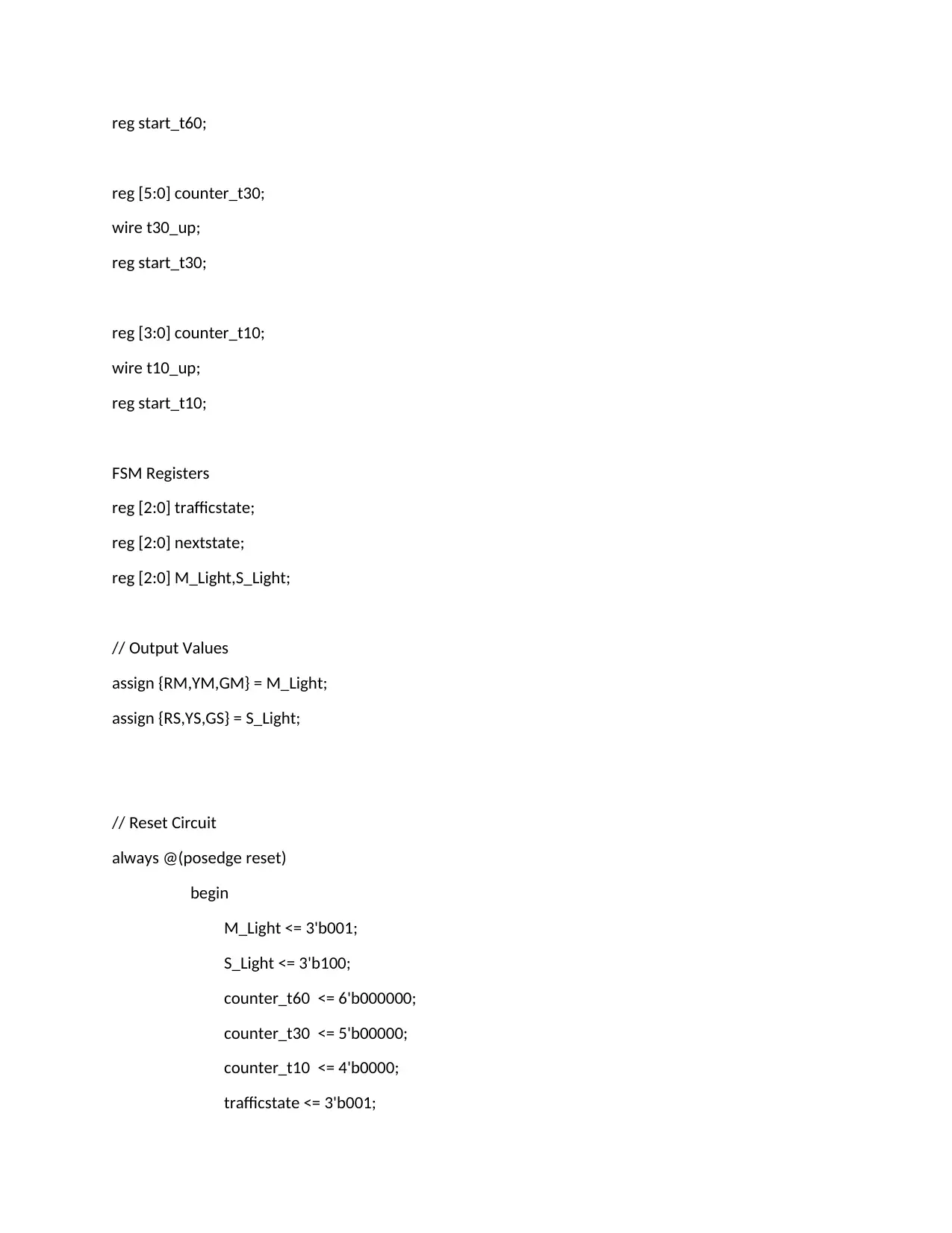
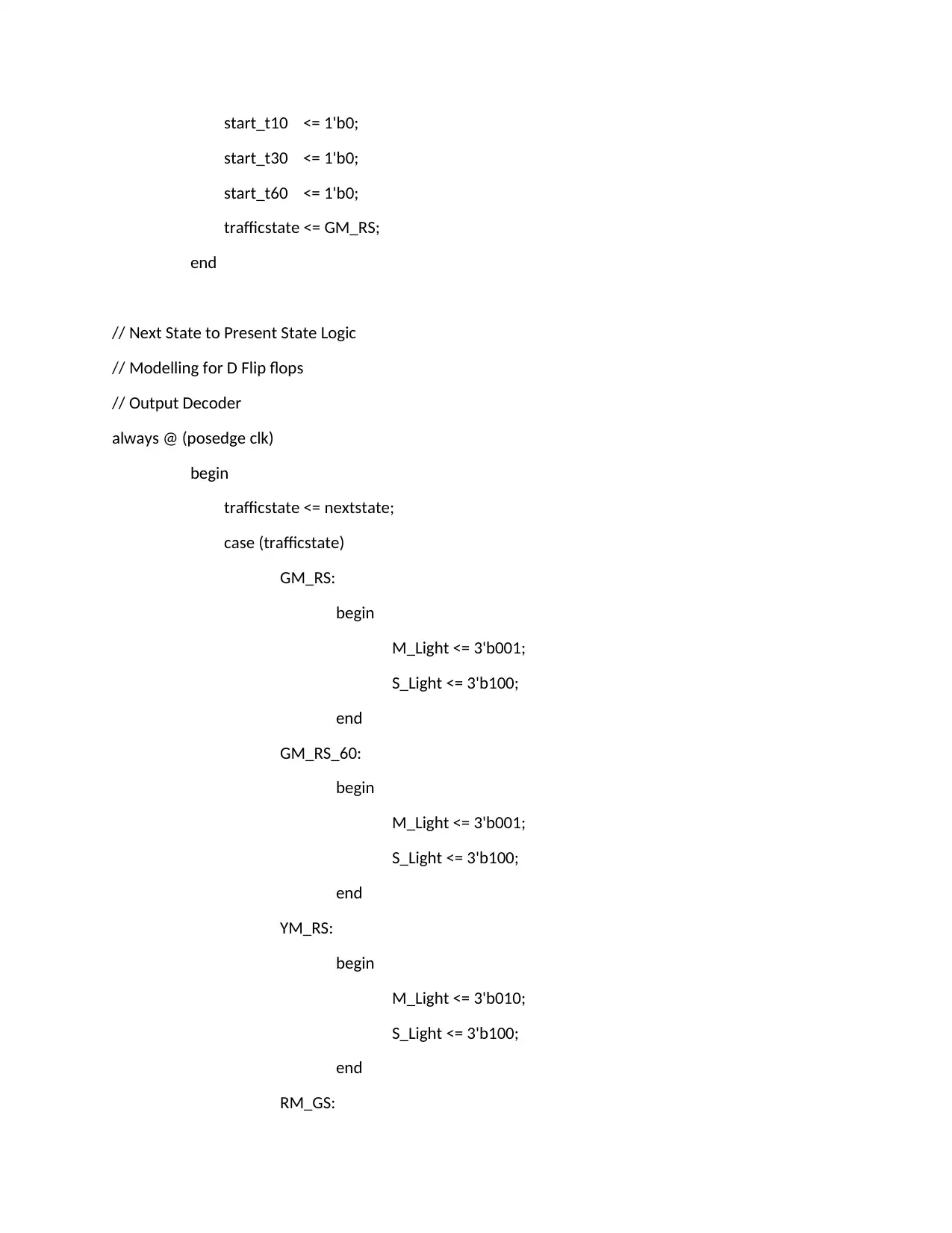
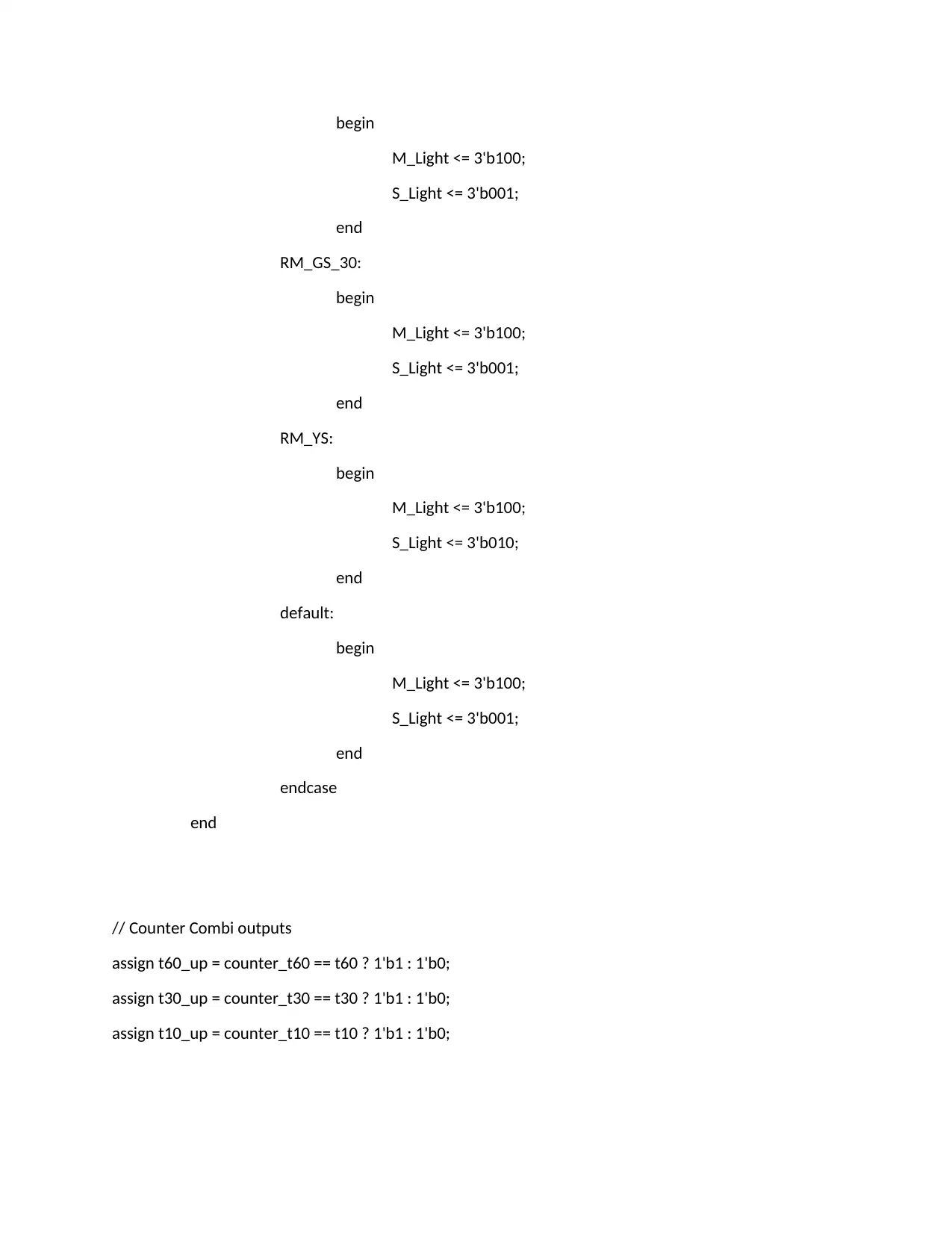
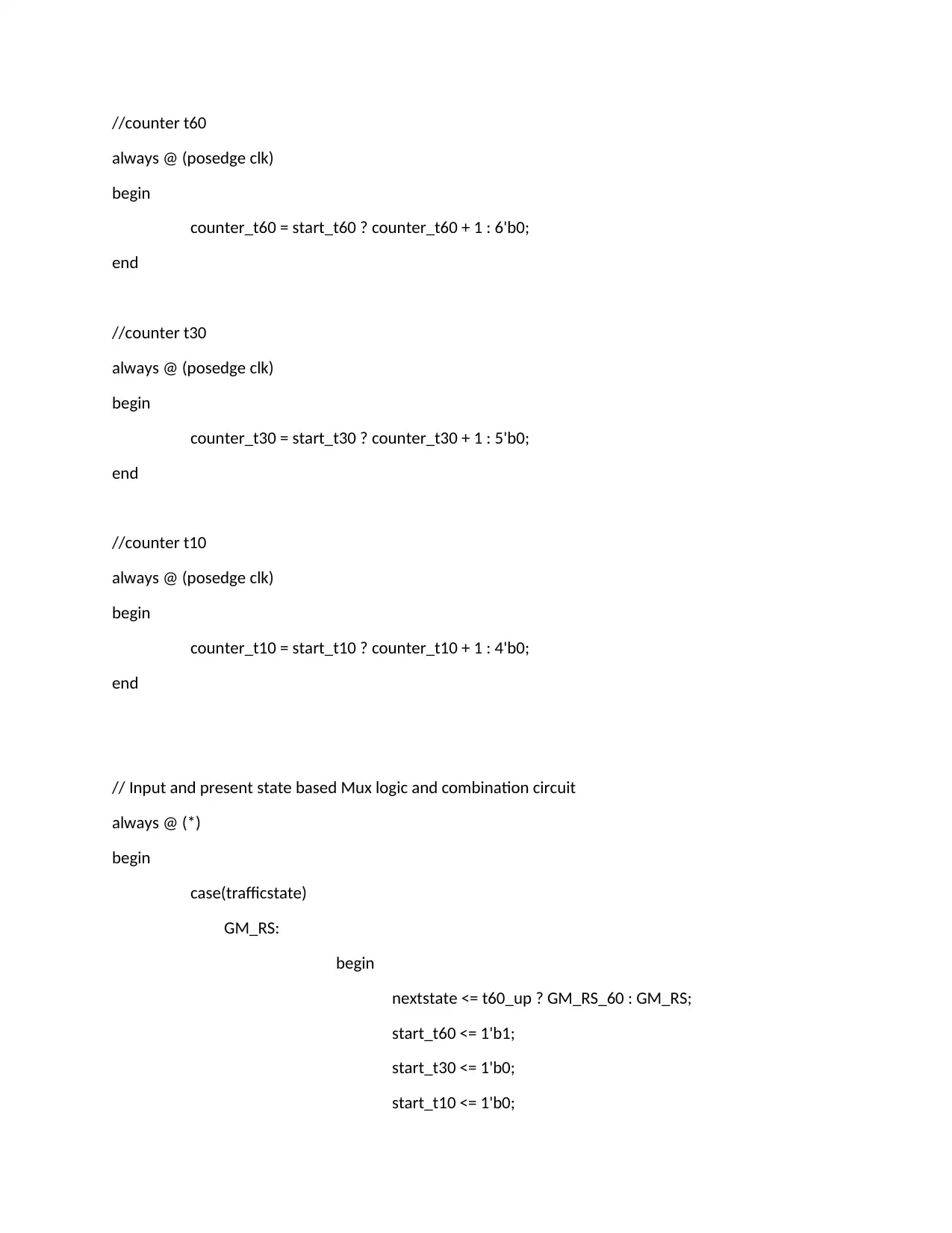
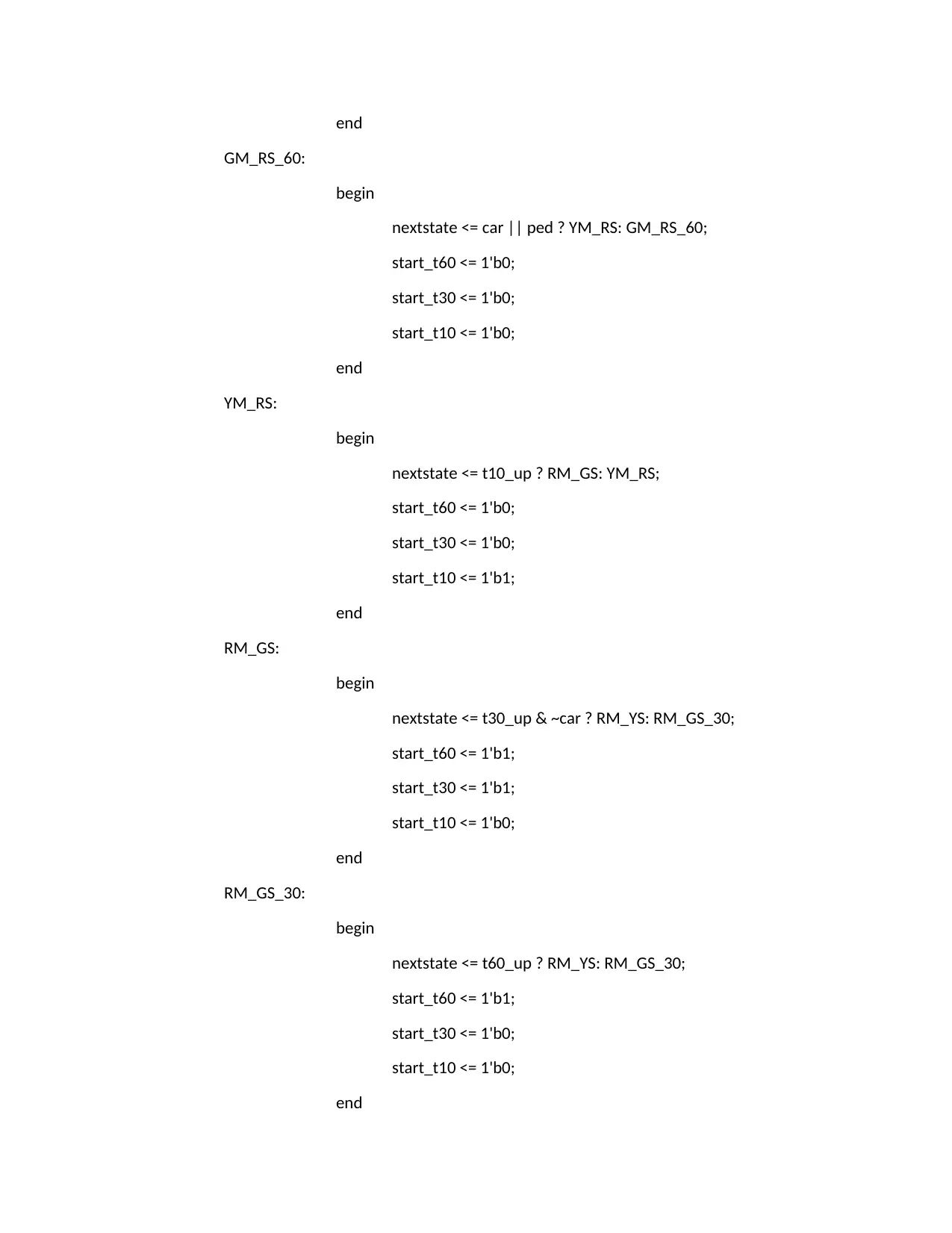
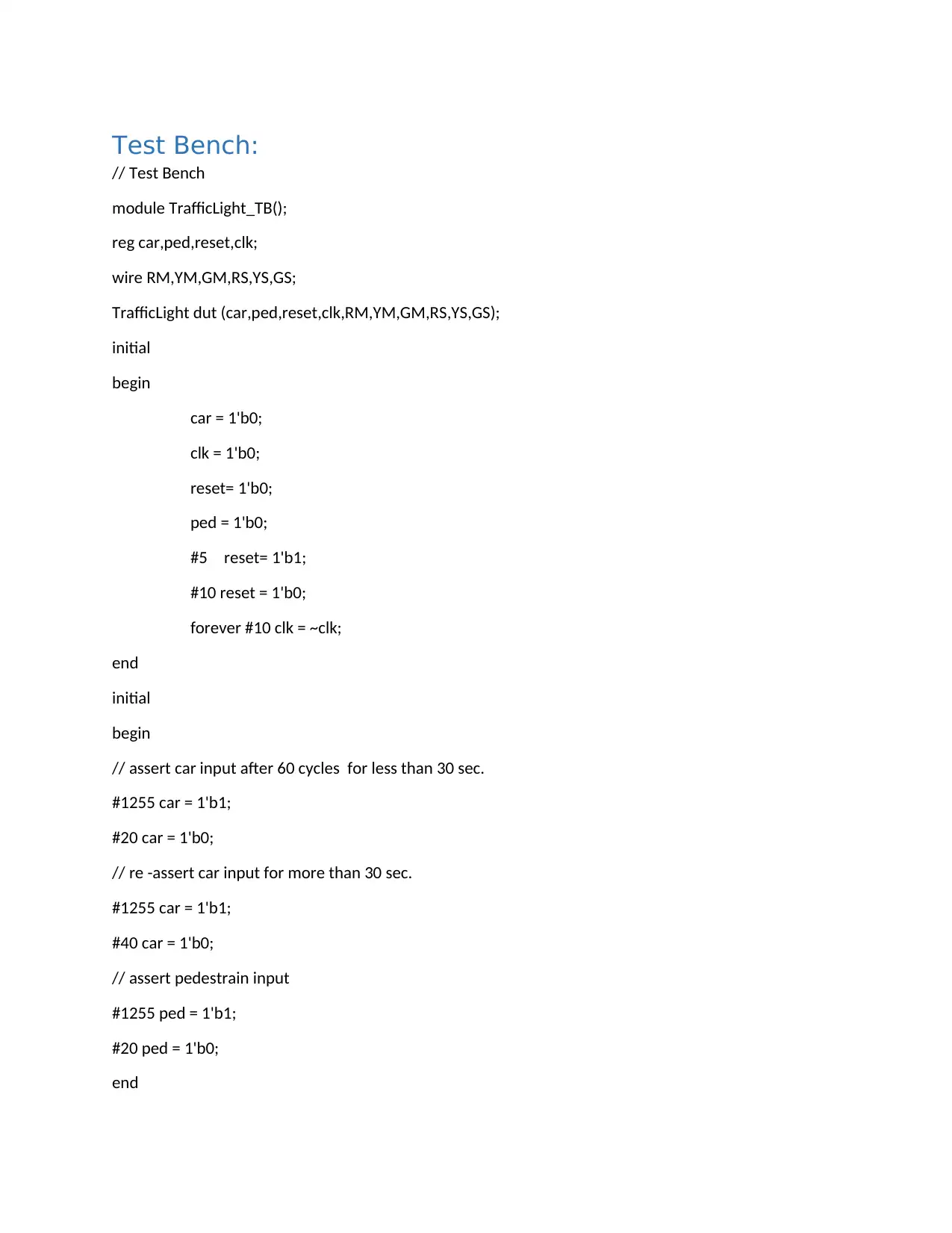
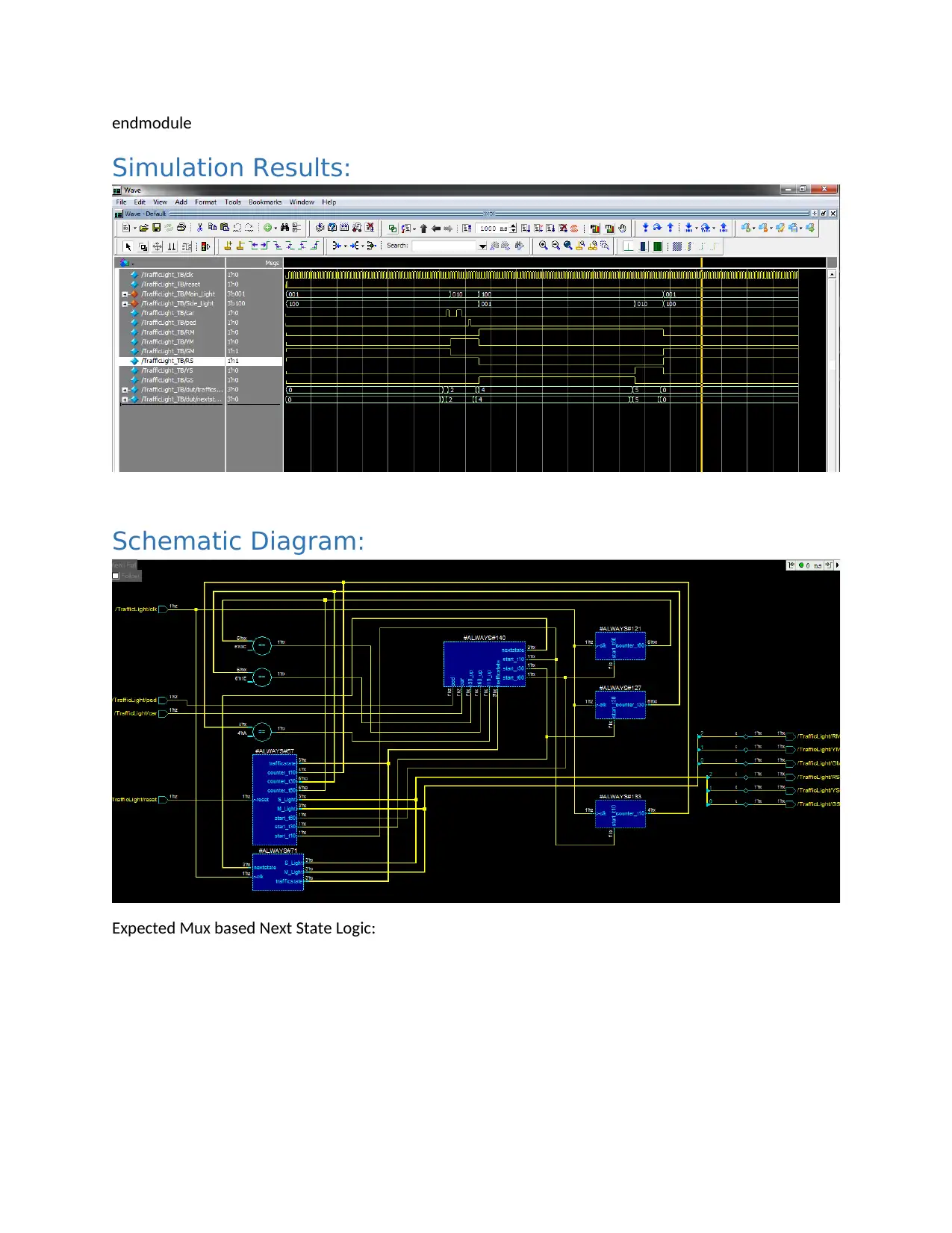
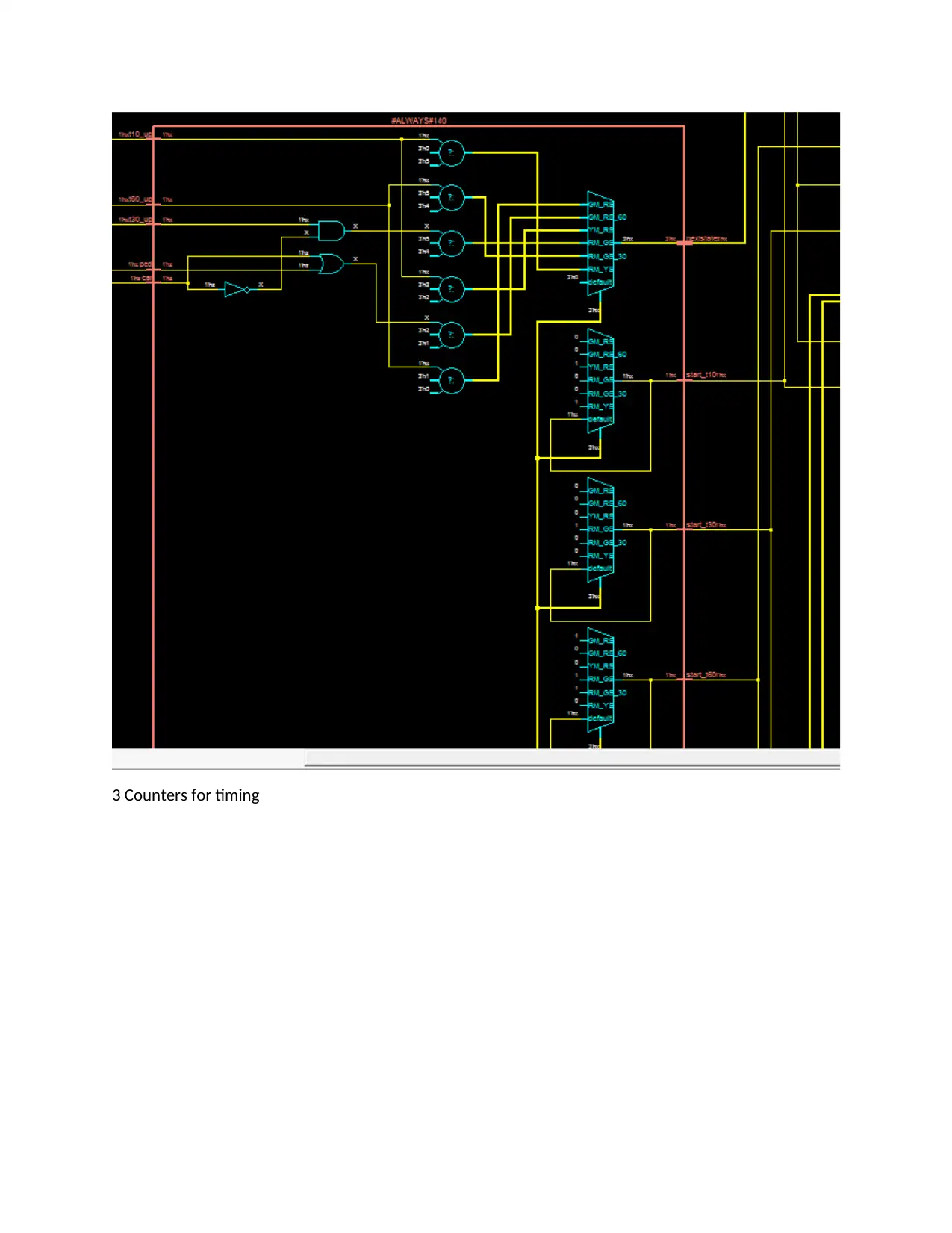
This document presents a detailed solution for a traffic light controller design, addressing the requirements of the ELEC2141 Digital Circuit Design assignment. The solution begins with a state diagram and state table, followed by a design approach utilizing D flip-flops for sequential components and multiplexers with basic gates for combinational logic. The assignment includes the HDL code in Verilog, defining states, counters, and logic for the traffic light's operation, along with a test bench for simulation and verification. The test bench simulates various scenarios, including car and pedestrian inputs. The simulation results, schematic diagram, and expected MUX-based next-state logic are also provided, ensuring a comprehensive understanding of the traffic light controller's functionality. The assignment is a complete project solution, incorporating all necessary components for a thorough design and implementation of the traffic light controller.
1 out of 13


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.