Time Delay Analysis and Control Design for Quadrotor UAV (ENS5253)
VerifiedAdded on 2023/01/19
|9
|2253
|72
Report
AI Summary
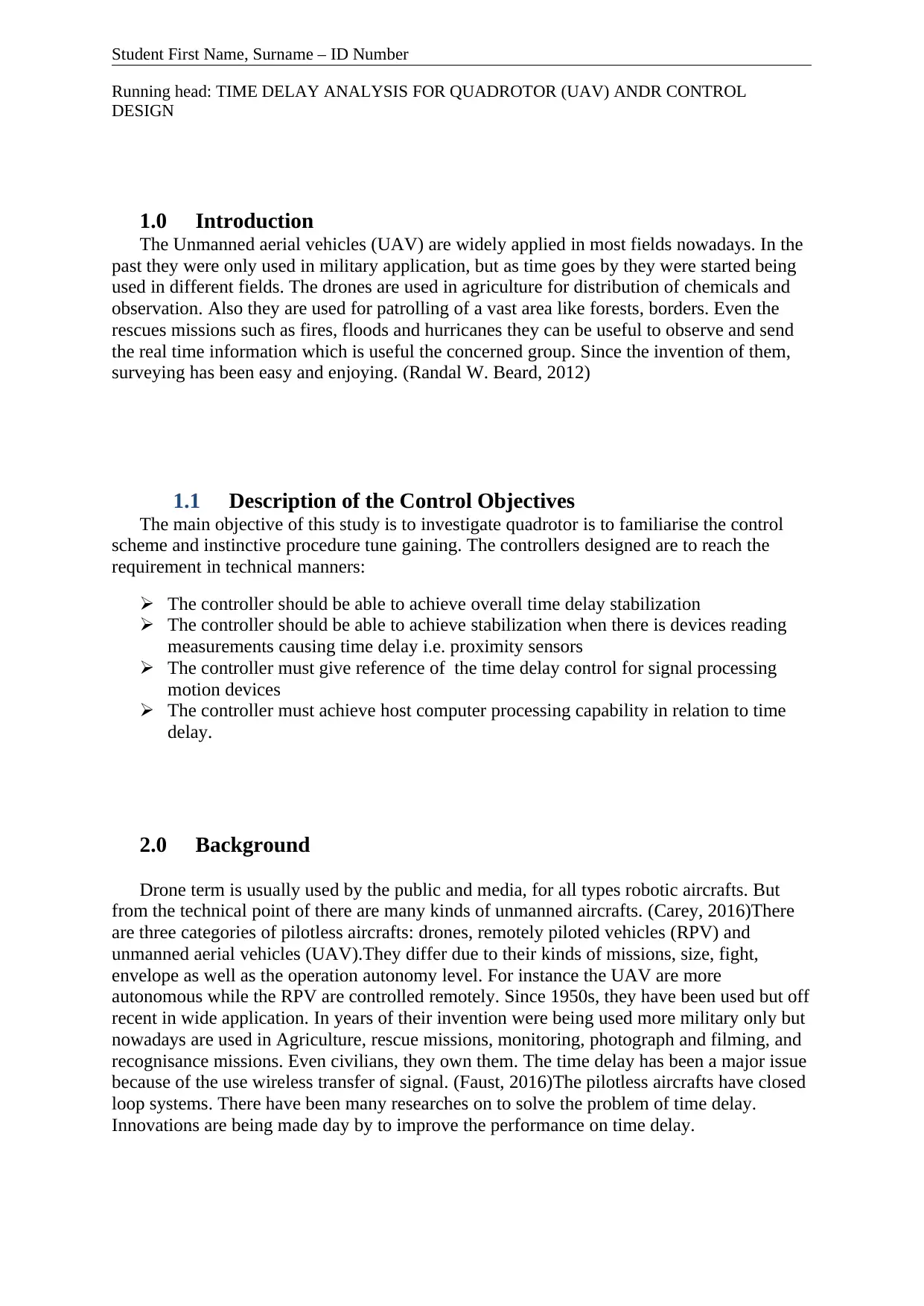
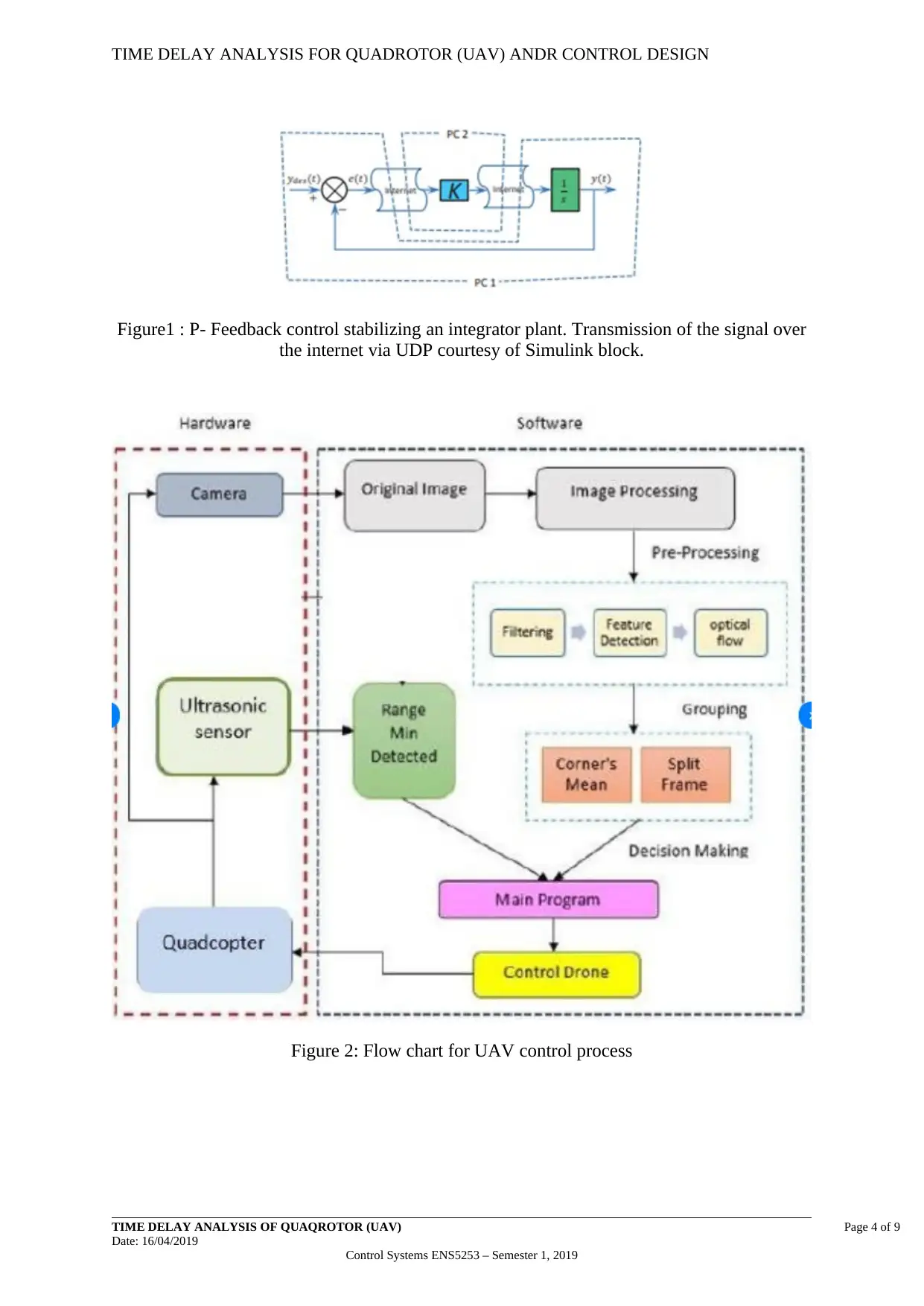
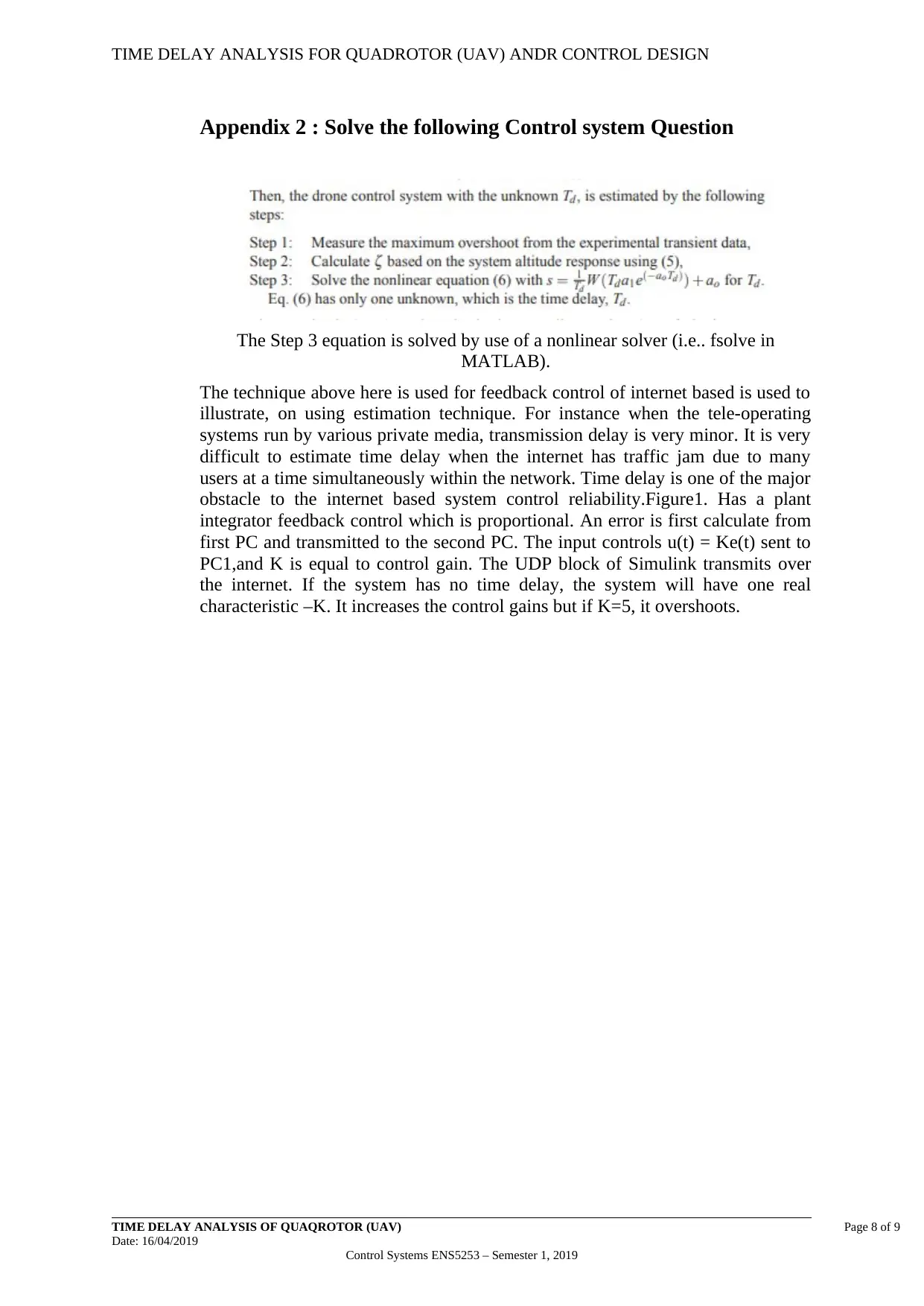
This report investigates the impact of time delay on quadrotor UAV control systems, focusing on the challenges posed by wireless communication and signal transmission delays. It identifies factors contributing to time delay and explores solutions using PV and P controllers to achieve stability and improve transient responses. The report details the implementation of time-delay estimation methods using characteristic roots and Lambert W function in MATLAB/Simulink, using a Parrot AR. Drone 2.0 UAV as a case study. Numerical and analytical approaches are employed to estimate time delay, and appropriate controller gains are applied to mitigate the effects of control signal saturation. The findings demonstrate the effectiveness of analytical solutions of Delay Differential Equations (DDEs) and Ordinary Differential Equations (ODEs) for time delay estimation in internet-based and quadrotor UAV control systems.




1 out of 9
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.