Sensors, Instrumentation & Control (MP4706) - LMI System Design Report
VerifiedAdded on 2022/07/28
|8
|1837
|39
Report
AI Summary
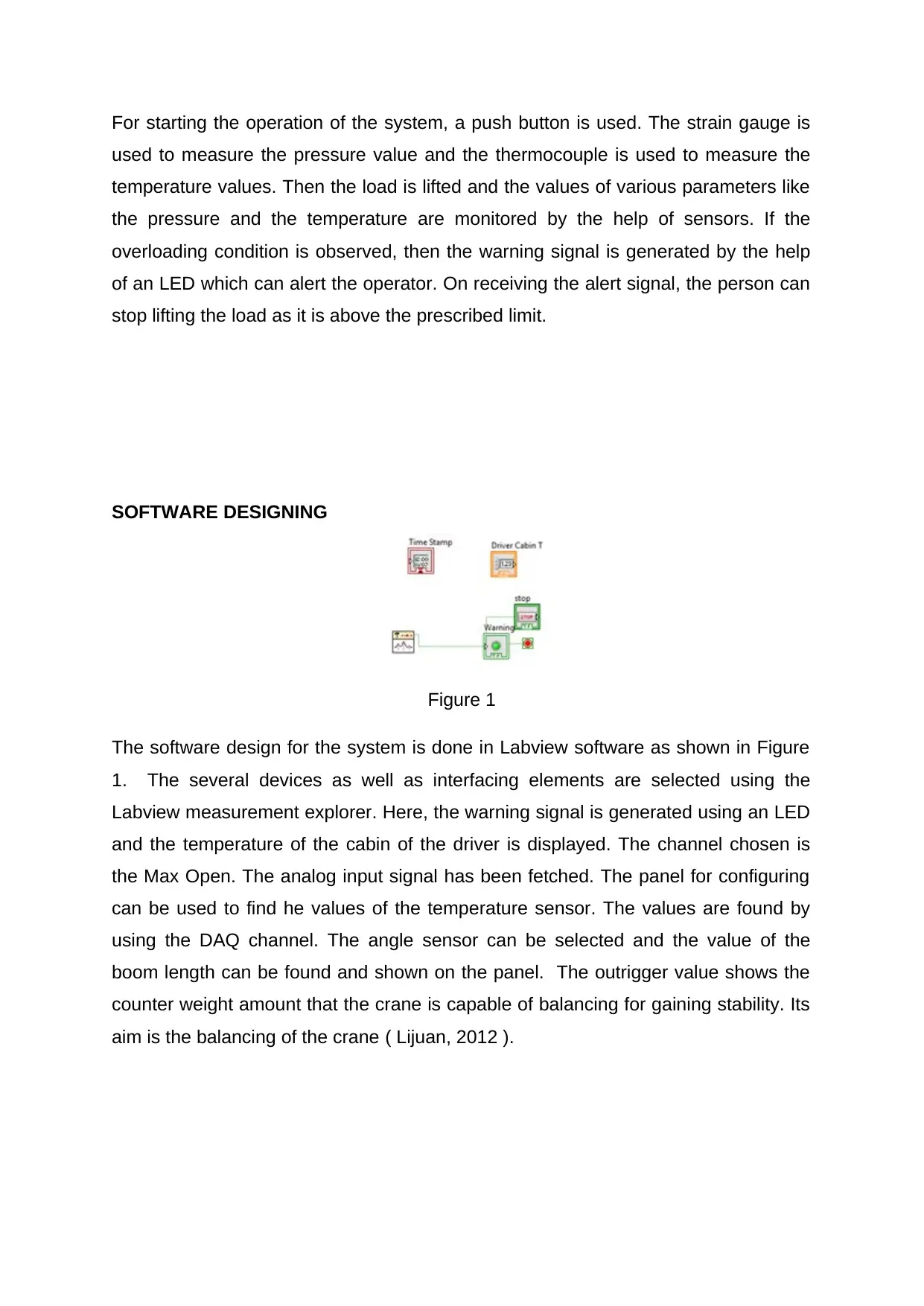
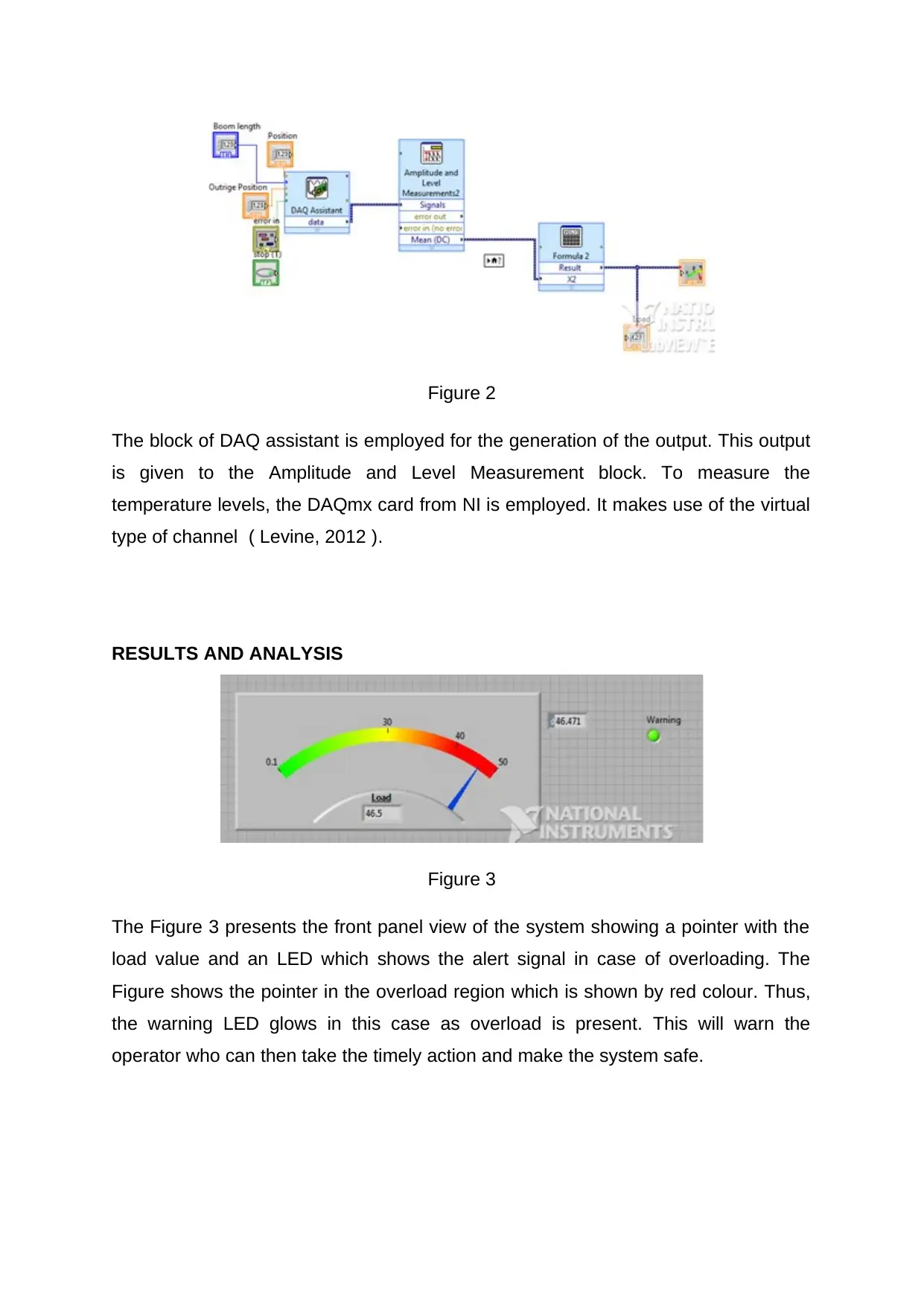
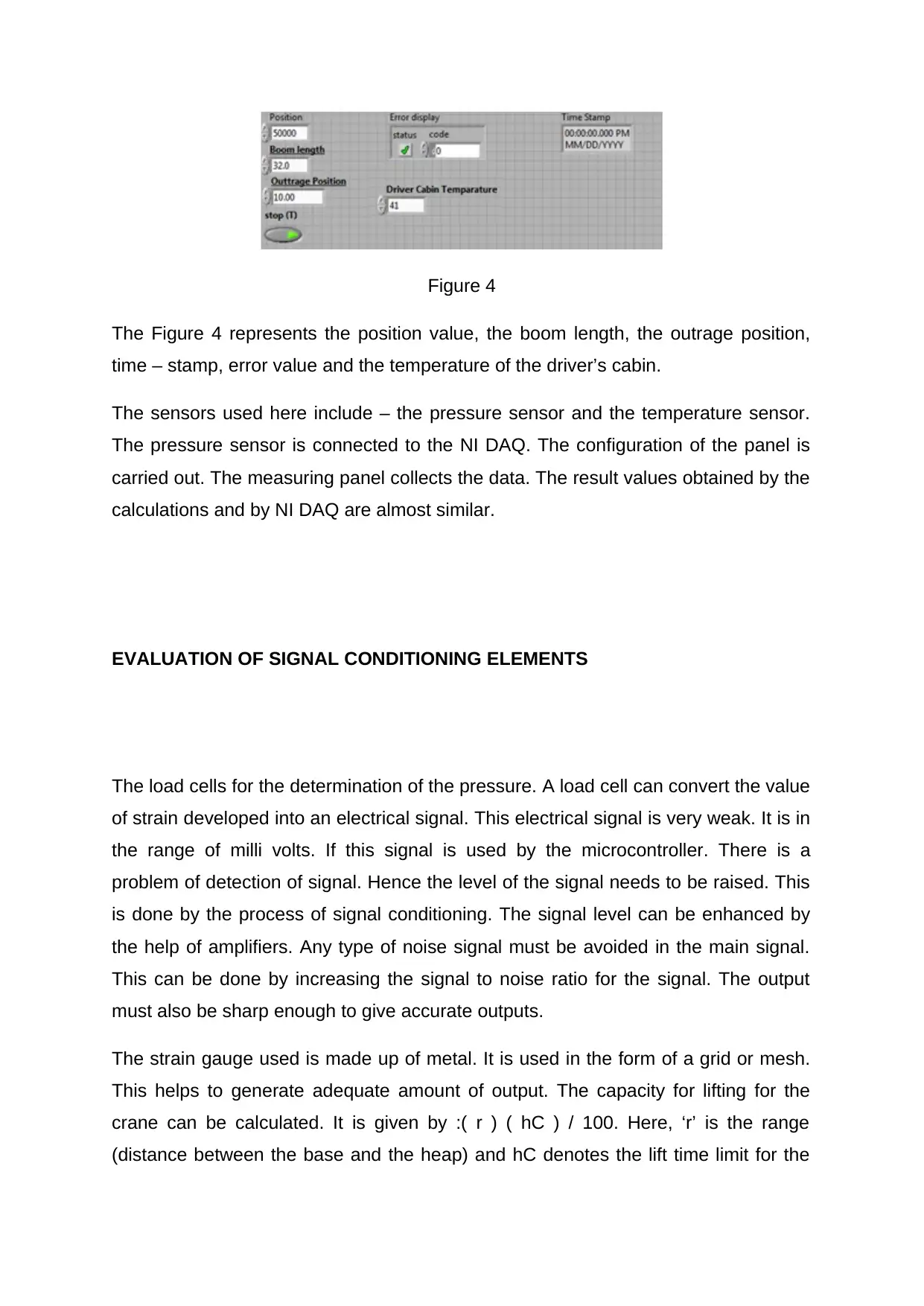
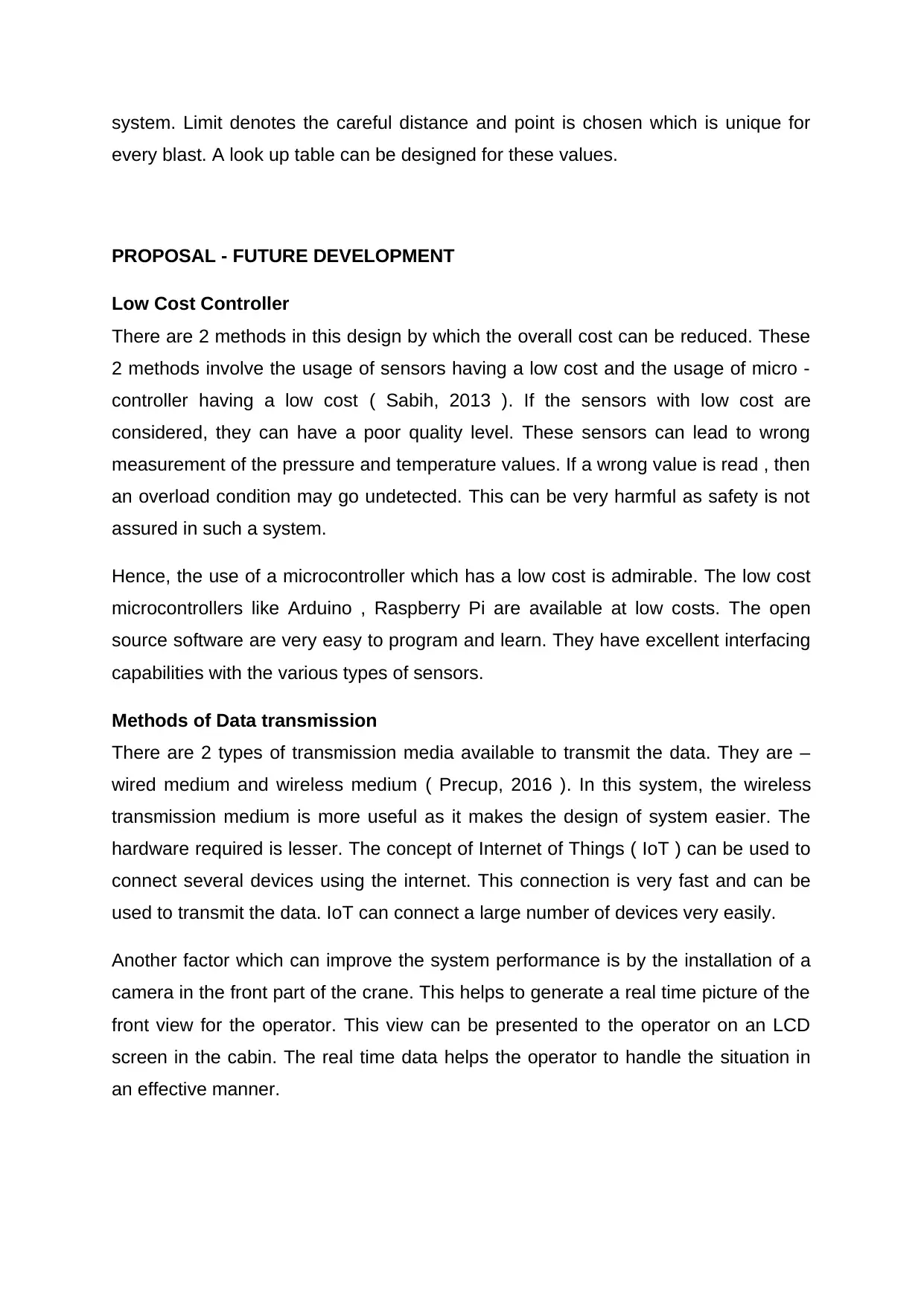
This report details the design and implementation of a Load Moment Indicator (LMI) system for crane safety. The system, developed using LabVIEW, utilizes pressure and temperature sensors to detect overload conditions. The report covers the design of the LMI system, software design, results and analysis, evaluation of signal conditioning elements, and proposals for future development, including low-cost controllers and data transmission methods. The front panel view of the system, displaying load values and an alert LED, is presented. The report also analyzes the signal conditioning elements, particularly load cells. Finally, it proposes future developments such as low-cost controllers (Arduino, Raspberry Pi) and wireless data transmission using the Internet of Things (IoT) to improve the system's performance. References to relevant research papers are also included.
1 out of 8
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.