Sun Tracking Solar Panel Project Report for Bachelor of Technology in Engineering
VerifiedAdded on 2023/06/05
|43
|9237
|320
AI Summary
This project report discusses the development of a sun tracking solar panel using a microcontroller and servomotor. It includes a literature review on embedded systems, hardware and software requirements, and testing. Submitted for the award of Bachelor of Technology in Engineering.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.

For the award of the degree
Bachelor of Technology
In
Engineering
Submitted by
---------------------------------------------------------
------------------------------------------------------
---------------------------------------------------------
------------------------------------------------------
--------------------------------------------------------- ------------------------------------------------------
A Project Report on
SUN TRACKING SOLAR PANEL
Submitted in partial fulfilment of the
requirements
Bachelor of Technology
In
Engineering
Submitted by
---------------------------------------------------------
------------------------------------------------------
---------------------------------------------------------
------------------------------------------------------
--------------------------------------------------------- ------------------------------------------------------
A Project Report on
SUN TRACKING SOLAR PANEL
Submitted in partial fulfilment of the
requirements
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

Department of __________________________
Engineering
____________________College of Engineering
Affiliated to ____________________ University
Engineering
____________________College of Engineering
Affiliated to ____________________ University

Abstract
The renewable energy is abundant in nature and it is very necessary to exploit it in the most
efficient way. Solar sector holds a very important place today because it is less tedious and
complex as compared to the other resources. Moreover solar energy is not limited to any
region or geographical area and therefore anyone can make use of this energy as per his need.
The main thing is that how it is utilised for maximum output. Nowadays solar energy
exploitation is not optimised. In order to fulfil for the demand the number of solar panels
installed are increased in the form of a grid. The same requirement of power can be satisfied
by less panels only if the power extracted is maximised. This way cost of the overall circuit
increases making it uneconomical. This issue is solved in this project with the help of
commonly used components. It is cheap, portable and easy to build unlike any complex
development. The basic knowledge of any programming language along with some idea
about electronics is enough to enable anyone in grasping and developing the same.
i
The renewable energy is abundant in nature and it is very necessary to exploit it in the most
efficient way. Solar sector holds a very important place today because it is less tedious and
complex as compared to the other resources. Moreover solar energy is not limited to any
region or geographical area and therefore anyone can make use of this energy as per his need.
The main thing is that how it is utilised for maximum output. Nowadays solar energy
exploitation is not optimised. In order to fulfil for the demand the number of solar panels
installed are increased in the form of a grid. The same requirement of power can be satisfied
by less panels only if the power extracted is maximised. This way cost of the overall circuit
increases making it uneconomical. This issue is solved in this project with the help of
commonly used components. It is cheap, portable and easy to build unlike any complex
development. The basic knowledge of any programming language along with some idea
about electronics is enough to enable anyone in grasping and developing the same.
i

Table of Contents
Abstract.......................................................................................................................................i
Table of Contents.......................................................................................................................ii
Acknowledgement....................................................................................................................iv
1 Introduction........................................................................................................................1
2 Main Body & Literature review.........................................................................................2
2.1 Embedded Systems......................................................................................................2
2.1.1 Which systems can call themselves as Embedded?.............................................2
2.1.2 Constituents of an Embedded System..................................................................3
2.1.2.1 Programming:..................................................................................................3
2.1.2.2 Peripherals:......................................................................................................3
2.1.2.3 Function Addition:............................................................................................3
2.1.2.4 Debugging:.......................................................................................................3
2.1.3 Crosschecking:.....................................................................................................4
2.1.4 What are requirements to work on it?..................................................................4
2.1.5 Applications.........................................................................................................4
2.2 Block Diagram.............................................................................................................4
2.3 Hardware Required......................................................................................................5
2.3.1 Microcontroller....................................................................................................5
2.3.2 Liquid Crystal Display (LCD)...........................................................................10
2.3.3 Solar Panel.........................................................................................................11
2.3.4 Servo Motors......................................................................................................13
2.3.5 Battery................................................................................................................14
2.3.6 Regulator............................................................................................................17
2.3.7 Power Supply.....................................................................................................17
2.3.8 Rectifier..............................................................................................................18
2.3.9 Capacitors...........................................................................................................18
ii
Abstract.......................................................................................................................................i
Table of Contents.......................................................................................................................ii
Acknowledgement....................................................................................................................iv
1 Introduction........................................................................................................................1
2 Main Body & Literature review.........................................................................................2
2.1 Embedded Systems......................................................................................................2
2.1.1 Which systems can call themselves as Embedded?.............................................2
2.1.2 Constituents of an Embedded System..................................................................3
2.1.2.1 Programming:..................................................................................................3
2.1.2.2 Peripherals:......................................................................................................3
2.1.2.3 Function Addition:............................................................................................3
2.1.2.4 Debugging:.......................................................................................................3
2.1.3 Crosschecking:.....................................................................................................4
2.1.4 What are requirements to work on it?..................................................................4
2.1.5 Applications.........................................................................................................4
2.2 Block Diagram.............................................................................................................4
2.3 Hardware Required......................................................................................................5
2.3.1 Microcontroller....................................................................................................5
2.3.2 Liquid Crystal Display (LCD)...........................................................................10
2.3.3 Solar Panel.........................................................................................................11
2.3.4 Servo Motors......................................................................................................13
2.3.5 Battery................................................................................................................14
2.3.6 Regulator............................................................................................................17
2.3.7 Power Supply.....................................................................................................17
2.3.8 Rectifier..............................................................................................................18
2.3.9 Capacitors...........................................................................................................18
ii
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

2.4 Software Required.....................................................................................................19
2.5 Layout Diagram.........................................................................................................25
2.6 Code...........................................................................................................................26
2.7 Hardware Testing......................................................................................................31
2.7.1 Continuity Test...................................................................................................31
2.7.2 Power-On Test...................................................................................................32
3 Conclusion........................................................................................................................33
References..................................................................................................................................v
iii
2.5 Layout Diagram.........................................................................................................25
2.6 Code...........................................................................................................................26
2.7 Hardware Testing......................................................................................................31
2.7.1 Continuity Test...................................................................................................31
2.7.2 Power-On Test...................................................................................................32
3 Conclusion........................................................................................................................33
References..................................................................................................................................v
iii
Acknowledgement
The satisfaction and euphoria that accompany the successful completion of any task would be
incomplete without the mentioning of the people whose constant guidance and
encouragement made it possible. We take pleasure in presenting before you, our project,
which is result of studied blend of both research and knowledge.
We express our earnest gratitude to our internal guide, Assistant Professor ______________,
Department of ECE, our project guide, for his constant support, encouragement and guidance.
We are grateful for his cooperation and his valuable suggestions.
Finally, we express our gratitude to all other members who are involved either directly or
indirectly for the completion of this project.
iv
The satisfaction and euphoria that accompany the successful completion of any task would be
incomplete without the mentioning of the people whose constant guidance and
encouragement made it possible. We take pleasure in presenting before you, our project,
which is result of studied blend of both research and knowledge.
We express our earnest gratitude to our internal guide, Assistant Professor ______________,
Department of ECE, our project guide, for his constant support, encouragement and guidance.
We are grateful for his cooperation and his valuable suggestions.
Finally, we express our gratitude to all other members who are involved either directly or
indirectly for the completion of this project.
iv

1 Introduction
Solar energy is the most abundant energy present on Earth. It is a renewable source of energy
and therefore cannot be depleted. It doesn’t pollute the environment. Moreover solar energy
does not require any complicated process or machinery. It consists of a solar panel and an
inverter along with the controller. But the current scenario has not achieved optimisation in
terms of capturing and exploiting the sun energy to a very large extent. The position of the
sun is changing throughout the day but the device which is producing energy is static and
therefore it reduces voltage unevenly throughout the day. This issue is a big one for the
industries who require a constant supply of voltage for their operation. To meet this
challenge, a project is proposed that contains microcontroller controlling the displacement of
the solar panel according to the position of the sun during the day. A servomotor controls the
solar panel. It turns it according to the output signal given by the microcontroller. This way
the solar panel is continuously facing the sun and it receives the maximum solar energy that
can be converted into the voltage. If not the constant, but still near to the same value is
received every time from the output. This, although a very simple point, but it quite and
importance. The future holds for the renewable energy sources.
1
Solar energy is the most abundant energy present on Earth. It is a renewable source of energy
and therefore cannot be depleted. It doesn’t pollute the environment. Moreover solar energy
does not require any complicated process or machinery. It consists of a solar panel and an
inverter along with the controller. But the current scenario has not achieved optimisation in
terms of capturing and exploiting the sun energy to a very large extent. The position of the
sun is changing throughout the day but the device which is producing energy is static and
therefore it reduces voltage unevenly throughout the day. This issue is a big one for the
industries who require a constant supply of voltage for their operation. To meet this
challenge, a project is proposed that contains microcontroller controlling the displacement of
the solar panel according to the position of the sun during the day. A servomotor controls the
solar panel. It turns it according to the output signal given by the microcontroller. This way
the solar panel is continuously facing the sun and it receives the maximum solar energy that
can be converted into the voltage. If not the constant, but still near to the same value is
received every time from the output. This, although a very simple point, but it quite and
importance. The future holds for the renewable energy sources.
1
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

2 Main body & literature review
2.1 Embedded Systems
An embedded system is a combination of components that work in a synchronised manner
and constitute the following functionality (Keim, 2018),
As a main component whose job is to perform tasks based on computation.
It is developed for a particular purpose with very limited operation, and
Is used as one of the component in a given electrical network.
There is some uncertainty among some people that embedded system is nothing but a
mechanical or simple electronic device. But, it is not so. An IOT device is shown in figure 1
as embedded system (Swaroop, 2018).
Figure 1 (Keim, 2018)
2.1.1 Which systems can call themselves as Embedded?
Embedded system is not just single component, instead it is a group of many components
which synced together to perform a particular task. It can be called more like a system than
just single component or electronic device. This system can then be used in a larger system
basically it can be integrated into that and work collectively with that. For example,
refrigerator, air conditioner, water cooler, vending machine, laser printer and many more. We
2
2.1 Embedded Systems
An embedded system is a combination of components that work in a synchronised manner
and constitute the following functionality (Keim, 2018),
As a main component whose job is to perform tasks based on computation.
It is developed for a particular purpose with very limited operation, and
Is used as one of the component in a given electrical network.
There is some uncertainty among some people that embedded system is nothing but a
mechanical or simple electronic device. But, it is not so. An IOT device is shown in figure 1
as embedded system (Swaroop, 2018).
Figure 1 (Keim, 2018)
2.1.1 Which systems can call themselves as Embedded?
Embedded system is not just single component, instead it is a group of many components
which synced together to perform a particular task. It can be called more like a system than
just single component or electronic device. This system can then be used in a larger system
basically it can be integrated into that and work collectively with that. For example,
refrigerator, air conditioner, water cooler, vending machine, laser printer and many more. We
2

are surrounded by many embedded systems. All the system to one particular task and nothing
more than that. There are specialised in performing a single task perfectly. Here, when we
talk about device it means single component of this whole system. For example a cooling
module in a refrigerator is the electronic device or a thermostat which can be programmed
that is used in an electrical heating system.
2.1.2 Constituents of an Embedded System
But we use the term embedded system because it signifies that these systems possess a single
functionality and all the components are embedded inside a big system. Now, digging deeper,
an embedded system performs tasks that involve calculations. Mostly it is used for
microcontrollers but FPGA or microprocessor can also be used as the main operational
component or animal system. Every embedded system has a firmware, which involves
following tasks,
2.1.2.1 Programming:
We usually have to tell an embedded system about its function. This can be done through
programming, mostly in C language which is easy to understand and implement.
2.1.2.2 Peripherals:
The functioning and making use of these peripherals is a challenge for embedded developers.
They need to understand their functioning, usage and how they could be used. Some of the
peripherals are USB module, Analog to Digital converter (ADC), Programmable Counter
Module (PMC) and many more (Sankar, 2017), (Anish, 2018), (Bilal, 2017).
2.1.2.3 Function Addition:
It is not necessary that the code which is written works fine in the first attempt itself. There
might be some missing functions, tasks that has to be written in the programming language
concerned. After this the code has been brought to stage where it can be checked through the
compiler.
2.1.2.4 Debugging:
This term implies finding out the errors or the bugs within the code that were not visible for
the compilation. The errors may include syntax, runtime or any other. It is important to make
3
more than that. There are specialised in performing a single task perfectly. Here, when we
talk about device it means single component of this whole system. For example a cooling
module in a refrigerator is the electronic device or a thermostat which can be programmed
that is used in an electrical heating system.
2.1.2 Constituents of an Embedded System
But we use the term embedded system because it signifies that these systems possess a single
functionality and all the components are embedded inside a big system. Now, digging deeper,
an embedded system performs tasks that involve calculations. Mostly it is used for
microcontrollers but FPGA or microprocessor can also be used as the main operational
component or animal system. Every embedded system has a firmware, which involves
following tasks,
2.1.2.1 Programming:
We usually have to tell an embedded system about its function. This can be done through
programming, mostly in C language which is easy to understand and implement.
2.1.2.2 Peripherals:
The functioning and making use of these peripherals is a challenge for embedded developers.
They need to understand their functioning, usage and how they could be used. Some of the
peripherals are USB module, Analog to Digital converter (ADC), Programmable Counter
Module (PMC) and many more (Sankar, 2017), (Anish, 2018), (Bilal, 2017).
2.1.2.3 Function Addition:
It is not necessary that the code which is written works fine in the first attempt itself. There
might be some missing functions, tasks that has to be written in the programming language
concerned. After this the code has been brought to stage where it can be checked through the
compiler.
2.1.2.4 Debugging:
This term implies finding out the errors or the bugs within the code that were not visible for
the compilation. The errors may include syntax, runtime or any other. It is important to make
3

a code functional as desired. Debugging requires a lot of skill and it cannot be learnt through
books, it comes with practice and experience.
2.1.3 Crosschecking:
The code has been compiled, debugged and there is no error to be found but what happens if
for example, the device has to extinguish the fire and it doesn’t do that. Please take notice
that the code has been debugged, compiled and there is no issue found but the task which we
were demanding is not fulfilled in the runtime. These unexpected issues have to be solved
before presenting the code is the final one (Ravi, 2017).
2.1.4 What are requirements to work on it?
Embedded systems require certain skill set, patients and common sense with logical approach
as well. Basically it is the job of the embedded developer to developer emitted system but
ultimately the product has to be sold or employed somewhere. For example it has to be
installed in a factory where there are workers. Those workers have their own jobs and they
don’t have the time or the patience to understand the technicality of your product. Here
comes the interface, and emitted system should work in all conditions because it is intended
to work under harsh conditions as well, self-correcting behaviour is expected. Moreover the
interface should be so simple that any layman can also use it. In all being used in a real-time
world, and emitted system is to function properly and for a long period of time (Nasir, 8
Things for Embedded Systems Programming, 2016).
2.1.5 Applications
Communication
Artificial Intelligence
Space station
Military & warfare
Consumer electronics and many more.
2.2 Block Diagram
4
books, it comes with practice and experience.
2.1.3 Crosschecking:
The code has been compiled, debugged and there is no error to be found but what happens if
for example, the device has to extinguish the fire and it doesn’t do that. Please take notice
that the code has been debugged, compiled and there is no issue found but the task which we
were demanding is not fulfilled in the runtime. These unexpected issues have to be solved
before presenting the code is the final one (Ravi, 2017).
2.1.4 What are requirements to work on it?
Embedded systems require certain skill set, patients and common sense with logical approach
as well. Basically it is the job of the embedded developer to developer emitted system but
ultimately the product has to be sold or employed somewhere. For example it has to be
installed in a factory where there are workers. Those workers have their own jobs and they
don’t have the time or the patience to understand the technicality of your product. Here
comes the interface, and emitted system should work in all conditions because it is intended
to work under harsh conditions as well, self-correcting behaviour is expected. Moreover the
interface should be so simple that any layman can also use it. In all being used in a real-time
world, and emitted system is to function properly and for a long period of time (Nasir, 8
Things for Embedded Systems Programming, 2016).
2.1.5 Applications
Communication
Artificial Intelligence
Space station
Military & warfare
Consumer electronics and many more.
2.2 Block Diagram
4
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

Figure 2
Figure 2 shows the block diagram. It consists of some hardware as well as software for
burning the code in the microcontroller.
2.3 Hardware Required
2.3.1 Microcontroller
A microcontroller is simply a small computer that is built on a silicon wafer through VLSI
technology. It is also called as an embedded computer because it’s basically a microprocessor
integrated with the peripherals such as input/output, memory and other. Thus, making it an
embedded system. Microcomputers achieved, the nature and fast. They are programmed to do
a particular task. There are wide variety of microcontrollers available, differentiated on the
basis of their data bus. A microcontroller has a main processing unit, Analog to Digital
converter (ADC), timers, counters, oscillator, interrupts, serial ports, Random Access
Memory (RAM), Read Only Memory (ROM) and many more. The main processing unit
decodes the instruction and executes it. The memory stores the data and the code. IO ports
helps in interfacing with other peripherals. Timers and counters are one of the main features
of the microcontroller, they can be multiple. All the functions related to the clock such as
5
Figure 2 shows the block diagram. It consists of some hardware as well as software for
burning the code in the microcontroller.
2.3 Hardware Required
2.3.1 Microcontroller
A microcontroller is simply a small computer that is built on a silicon wafer through VLSI
technology. It is also called as an embedded computer because it’s basically a microprocessor
integrated with the peripherals such as input/output, memory and other. Thus, making it an
embedded system. Microcomputers achieved, the nature and fast. They are programmed to do
a particular task. There are wide variety of microcontrollers available, differentiated on the
basis of their data bus. A microcontroller has a main processing unit, Analog to Digital
converter (ADC), timers, counters, oscillator, interrupts, serial ports, Random Access
Memory (RAM), Read Only Memory (ROM) and many more. The main processing unit
decodes the instruction and executes it. The memory stores the data and the code. IO ports
helps in interfacing with other peripherals. Timers and counters are one of the main features
of the microcontroller, they can be multiple. All the functions related to the clock such as
5

measurement of the frequency, generation of the oscillations, pulse counting, and many more
are performed by the timer and counters. The signal present in the environment is Analog in
nature and therefore in order to make it understandable, it is converted into its digital form.
The reverse function is carried out in the case of Digital to Analog Converters (DAC).
Processed digital signal has to be converted back to its Analog for which can be used for
other applications. The Internet control circuits interrupts in the given code. This means that
if some special functions has to be performed before the normal function, the controller can
skip the normal functions and execute the special ones (Vysakh, 2018).
2.3.1.1 ATmega328p
In this project, we will be using one of the most powerful and popular microcontroller
developed by ATMEL- ATmega328p Microcontroller Control Unit (MCU). This MCU lies
in the series of Advanced Virtual RISC (AVR). It can process eight data bits at a time, it has
32 kB of internal memory. Even when the electricity is removed the microcontroller
continues to store the data (Nasir, 2017). This is due to the presence of an Erasable
Programmable Read-only memory, the size of which is 1Kb. ATmega328p is cheap,
powerful and consumes very low power. Its architecture is based on the advanced RISC. It
has many useful pins such as 6 for Pulse Width Modulation (PWM), one pair for serial
communication, Analog pins for reading value from sensors. Due to many advantages, it has
been used in another most popular development boards in the market ‘Arduino Uno R3’.
Power input is from 3.3V to 5V. ATmega328p has a total of 28 pins shown with their name
in figure 3.
6
are performed by the timer and counters. The signal present in the environment is Analog in
nature and therefore in order to make it understandable, it is converted into its digital form.
The reverse function is carried out in the case of Digital to Analog Converters (DAC).
Processed digital signal has to be converted back to its Analog for which can be used for
other applications. The Internet control circuits interrupts in the given code. This means that
if some special functions has to be performed before the normal function, the controller can
skip the normal functions and execute the special ones (Vysakh, 2018).
2.3.1.1 ATmega328p
In this project, we will be using one of the most powerful and popular microcontroller
developed by ATMEL- ATmega328p Microcontroller Control Unit (MCU). This MCU lies
in the series of Advanced Virtual RISC (AVR). It can process eight data bits at a time, it has
32 kB of internal memory. Even when the electricity is removed the microcontroller
continues to store the data (Nasir, 2017). This is due to the presence of an Erasable
Programmable Read-only memory, the size of which is 1Kb. ATmega328p is cheap,
powerful and consumes very low power. Its architecture is based on the advanced RISC. It
has many useful pins such as 6 for Pulse Width Modulation (PWM), one pair for serial
communication, Analog pins for reading value from sensors. Due to many advantages, it has
been used in another most popular development boards in the market ‘Arduino Uno R3’.
Power input is from 3.3V to 5V. ATmega328p has a total of 28 pins shown with their name
in figure 3.
6

Figure 3 (Nasir, 2017)
2.3.1.2 ATmega328p pinout
Figure 4 (Nasir, 2017)
7
2.3.1.2 ATmega328p pinout
Figure 4 (Nasir, 2017)
7
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Figure 4 shows the pinout.
VCC: It is the power supply pin (3.3V-5V).
GND: Ground pin.
AVCC: It is the supply pin for ADC.
Port A: It consists of a group of pins ranging from PA0 to PA7. These are the Analog input
pins of the ADC. Otherwise they can also be used like 8 digital ones.
Port B: It constitutes pins PB0 to PB7. These are the 8 digital pins having pull-resistors at
each one.
Port C: It constitutes PC0 to PC7. Symmetrical drive characteristics is seen in the output
buffers and high sink as well.
Port D: It groups pins from PD0 to PD7. These are also the digital pins and pulled-up in the
same manner as port B.
AREF: It is the pin used to assign the highest value of voltage that can be recorded using
ADC.
ATmega328p also has a lot of registers. It has 32 general purpose ones as shown in figure 5,
all of which are the constituents of Static Random Access Memory (SRAM).
Figure 5 (Nasir, 2017)
8
VCC: It is the power supply pin (3.3V-5V).
GND: Ground pin.
AVCC: It is the supply pin for ADC.
Port A: It consists of a group of pins ranging from PA0 to PA7. These are the Analog input
pins of the ADC. Otherwise they can also be used like 8 digital ones.
Port B: It constitutes pins PB0 to PB7. These are the 8 digital pins having pull-resistors at
each one.
Port C: It constitutes PC0 to PC7. Symmetrical drive characteristics is seen in the output
buffers and high sink as well.
Port D: It groups pins from PD0 to PD7. These are also the digital pins and pulled-up in the
same manner as port B.
AREF: It is the pin used to assign the highest value of voltage that can be recorded using
ADC.
ATmega328p also has a lot of registers. It has 32 general purpose ones as shown in figure 5,
all of which are the constituents of Static Random Access Memory (SRAM).
Figure 5 (Nasir, 2017)
8

2.3.1.3 ATmega328p and Arduino
Arduino UNO R3 is a development board that has ATmega328p chip built on it. This board
has many advantages and because of this only it is used in the place of ATmega328p these
days. This board is basically a simplified version in which all the power and ground pins are
internally shorted, oscillator is preinstalled, and every step is taken in order to make it easy to
use. Moreover the coding is also very easy, based on C language with a large community of
developers, many libraries are continuously being uploaded. This gives it an edge. It has a
total of 14 digital pins, used for both input and output function. Out of these pins 6 can be
used for PWM. An oscillator of 16MHz is connected, a DC power jack with a reset button as
well. It has a built it programmer that easily uploads codes without the need for any external
programmer. It can be uploaded using SPI pins. I2C interface is also provided along with
serial communication (Tawil, 2016). A 5V regulator NCP1117ST50T3G and a 3V regulator
LP2985-33DBVR is used. These regulators convert 12V from the DC jack to the
corresponding voltages while one can supply power directly from the USB as well. The
pinout is shown in figure 6.
9
Arduino UNO R3 is a development board that has ATmega328p chip built on it. This board
has many advantages and because of this only it is used in the place of ATmega328p these
days. This board is basically a simplified version in which all the power and ground pins are
internally shorted, oscillator is preinstalled, and every step is taken in order to make it easy to
use. Moreover the coding is also very easy, based on C language with a large community of
developers, many libraries are continuously being uploaded. This gives it an edge. It has a
total of 14 digital pins, used for both input and output function. Out of these pins 6 can be
used for PWM. An oscillator of 16MHz is connected, a DC power jack with a reset button as
well. It has a built it programmer that easily uploads codes without the need for any external
programmer. It can be uploaded using SPI pins. I2C interface is also provided along with
serial communication (Tawil, 2016). A 5V regulator NCP1117ST50T3G and a 3V regulator
LP2985-33DBVR is used. These regulators convert 12V from the DC jack to the
corresponding voltages while one can supply power directly from the USB as well. The
pinout is shown in figure 6.
9

Figure 6 (Tawil, 2016)
2.3.2 Liquid Crystal Display (LCD)
The LCD module we have used here is LM016L as shown in figure 7.
Figure 7
It has 16 pins. Pin description is shown below,
PIN1 (GND): Used for grounding.
PIN2 (VCC): Power supply from 4.7-5.3V can be applied here.
PIN3 (VEE): Used for contrast. Usually, an external potentiometer is used whose output is
connected to this pin.
PIN4 (RS): This pin selects either the data registers or the command one.
PIN5 (R/W): It can be made high or low depending on the purpose. If reads from the register
while low helps in writing on it.
PIN6 (EN): This pin is like a light switch of The LCD. When it is given zero, it pushes the
data to the data pins and whenever high, kept for some milliseconds and then bring back to
low makes it to execute the instructions.
PIN7-PIN14 (Data): These are the data pins out of which pins 7-10 are used as Least
Significant Bits (LSB) and from 11-14 for Most Significant Bits (MSB).
PIN15 (Backlight+): A set of Light Emitting Diodes are used to brighten the module up and
in order to use that, this pin can be supplied 5V through a 33 ohms register usually.
PIN16 (Backlight-): It is ground for the brightening LEDs mentioned just now.
LM016L has two registers- command and data registers. Command register stores the
instruction that is given to the LCD such as clearing the screen, setting the cursor at a point,
initialisation. Whereas a data register stores he character or the data that has to be displayed
on the screen, Data register is enabled when the RS pin is set high, while it is switched to
10
2.3.2 Liquid Crystal Display (LCD)
The LCD module we have used here is LM016L as shown in figure 7.
Figure 7
It has 16 pins. Pin description is shown below,
PIN1 (GND): Used for grounding.
PIN2 (VCC): Power supply from 4.7-5.3V can be applied here.
PIN3 (VEE): Used for contrast. Usually, an external potentiometer is used whose output is
connected to this pin.
PIN4 (RS): This pin selects either the data registers or the command one.
PIN5 (R/W): It can be made high or low depending on the purpose. If reads from the register
while low helps in writing on it.
PIN6 (EN): This pin is like a light switch of The LCD. When it is given zero, it pushes the
data to the data pins and whenever high, kept for some milliseconds and then bring back to
low makes it to execute the instructions.
PIN7-PIN14 (Data): These are the data pins out of which pins 7-10 are used as Least
Significant Bits (LSB) and from 11-14 for Most Significant Bits (MSB).
PIN15 (Backlight+): A set of Light Emitting Diodes are used to brighten the module up and
in order to use that, this pin can be supplied 5V through a 33 ohms register usually.
PIN16 (Backlight-): It is ground for the brightening LEDs mentioned just now.
LM016L has two registers- command and data registers. Command register stores the
instruction that is given to the LCD such as clearing the screen, setting the cursor at a point,
initialisation. Whereas a data register stores he character or the data that has to be displayed
on the screen, Data register is enabled when the RS pin is set high, while it is switched to
10
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

command mode in case of low. Data is in ASCII format. CG-RAM helps to make the
characters. Its size is 64 bytes and build character 8 in one attempt (Electronicsforu, 2016),
(Raj, 2015). Few important commands are given in figure 8.
Figure 8 (Electronicsforu, 2016)
2.3.3 Solar Panel
A solar cell is a device that converts solar energy into electrical energy. The process involved
is called photovoltaic effect. Solar cells are made up of silicon which is the most abundant
element. Moreover, they do not have any moving parts like generators and they also do not
involve any chemical reaction like batteries or need any fuel. This characteristic of solar cells
make it different from its competitors. These are cheap, lightweight and powerful when
combined in the form of a panel. These arrays are called as solar panels and constitute
thousands of minute solar cells. This energy generated can be transported to industries,
residents or any other purpose (Fonash , Fonash , & Ashok, 2018). Figure 9 shows a solar
cell.
11
characters. Its size is 64 bytes and build character 8 in one attempt (Electronicsforu, 2016),
(Raj, 2015). Few important commands are given in figure 8.
Figure 8 (Electronicsforu, 2016)
2.3.3 Solar Panel
A solar cell is a device that converts solar energy into electrical energy. The process involved
is called photovoltaic effect. Solar cells are made up of silicon which is the most abundant
element. Moreover, they do not have any moving parts like generators and they also do not
involve any chemical reaction like batteries or need any fuel. This characteristic of solar cells
make it different from its competitors. These are cheap, lightweight and powerful when
combined in the form of a panel. These arrays are called as solar panels and constitute
thousands of minute solar cells. This energy generated can be transported to industries,
residents or any other purpose (Fonash , Fonash , & Ashok, 2018). Figure 9 shows a solar
cell.
11

Figure 9 (Fonash , Fonash , & Ashok, 2018)
Through solar panels one can harness solar energy and convert it into useful electrical energy
which can be used for the daily purpose. Solar panels constitute many thousands of
photovoltaic cells or we can call them as PV cells which capture photons of the light particles
and undergo orbital transitions. These transitions of the silicon electrons liberate energy in the
form of current. All the DC currents from each solar cell is connected and converted into AC
current with the help of inverter provided with the solar panel. This is the current goes to the
breaker box in our house and is ready to supply AC power to the prizes. The energy metre
present in our house calculates and find out is whether we are still using the grid power or
not. There is a provision which states that if there is an excess power generated through solar
energy in our house, we can sell it. But many prefer not to do so and turn off this system so
that they can only use and nobody else (RGS Energy, 2015), (Woodford, 2018), (Meyers,
2011). A solar panel is shown in figure 10.
Figure 10 (Fonash , Fonash , & Ashok, 2018)
12
Through solar panels one can harness solar energy and convert it into useful electrical energy
which can be used for the daily purpose. Solar panels constitute many thousands of
photovoltaic cells or we can call them as PV cells which capture photons of the light particles
and undergo orbital transitions. These transitions of the silicon electrons liberate energy in the
form of current. All the DC currents from each solar cell is connected and converted into AC
current with the help of inverter provided with the solar panel. This is the current goes to the
breaker box in our house and is ready to supply AC power to the prizes. The energy metre
present in our house calculates and find out is whether we are still using the grid power or
not. There is a provision which states that if there is an excess power generated through solar
energy in our house, we can sell it. But many prefer not to do so and turn off this system so
that they can only use and nobody else (RGS Energy, 2015), (Woodford, 2018), (Meyers,
2011). A solar panel is shown in figure 10.
Figure 10 (Fonash , Fonash , & Ashok, 2018)
12

2.3.4 Servo Motors
A servomotor is a device that can turn, push or rotate any device or object with a very high
accuracy (Apoorve, 2015) as shown in figure 11.
Figure 11 (Apoorve, 2015)
Suppose it is desired to turn any object through certain angle, this is possible through
servomotor. It is nothing but a simple motor that has a servo mechanism running. A
servomotor can be either DC powered or AC powered and due to that it is called as either
DC’s rotor or an AC servomotor. Servomotor provide high torque and they themselves are
very light and compact therefore they find many applications such as in robotics and
automation. They are rated in kilogram per centimetre which means that the amount of
weight which can be raised in a unit centimetre is depicted in the ratings. In this project we
will be using a very popular servomotor TowerPro SG90. The signal that is used for
controlling the device is basically the difference of the output signal and the reference input
signal. This is done to make sure that the external noise doesn’t deteriorates the output signal.
Thus, servomotor mechanism is following a feedback system (Electronics Hub, 2015). In the
hardware level it constitutes a DC motor, potentiometer, gears and the control circuit as
shown in figure 12.
13
A servomotor is a device that can turn, push or rotate any device or object with a very high
accuracy (Apoorve, 2015) as shown in figure 11.
Figure 11 (Apoorve, 2015)
Suppose it is desired to turn any object through certain angle, this is possible through
servomotor. It is nothing but a simple motor that has a servo mechanism running. A
servomotor can be either DC powered or AC powered and due to that it is called as either
DC’s rotor or an AC servomotor. Servomotor provide high torque and they themselves are
very light and compact therefore they find many applications such as in robotics and
automation. They are rated in kilogram per centimetre which means that the amount of
weight which can be raised in a unit centimetre is depicted in the ratings. In this project we
will be using a very popular servomotor TowerPro SG90. The signal that is used for
controlling the device is basically the difference of the output signal and the reference input
signal. This is done to make sure that the external noise doesn’t deteriorates the output signal.
Thus, servomotor mechanism is following a feedback system (Electronics Hub, 2015). In the
hardware level it constitutes a DC motor, potentiometer, gears and the control circuit as
shown in figure 12.
13
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Figure 12 (Electronics Hub, 2015)
The gear assembly is connected to the DC motor in order to slow down that speed and
increase the talk. When the shaft is rotated, the resistors of the potentiometer of the changes.
This tells the servomotor to accurately determine the position. The difference between the
actual position and the desired position is fed into the control circuit in the form of error
signal. When there are signal zero this means that the servomotor has reached its desired
position and in that case no power supply to the DC motor. The directional control the
servomotor is possible through Pulse Width Modulation (PWM). In this the width of the
pulse determine the angle to which the shaft is to be rotated. For example, pulse of the width
for 2 milliseconds causes an angular displacement of 180°.
2.3.5 Battery
A battery is a device that has the capability to produce electricity as shown in figure 13.
There is a chemical reaction going on which converts the chemical energy into electrical
energy. The energy that is stored in the batteries is in the form of static energy unlike the
electricity which is a dynamic form. It continuously releases this energy for a set period of
time and after that the raw materials get exhausted and either it needs to be replaced or
recharged. A battery is a collection of many cells in each cell constitutes two electrodes and
the substance called as electrolyte. The electrodes are dipped into this electrolyte. One
electrode is marked as positive and the other is negative. To make it portable these electrodes
are covered including the electrolyte in a container from the external surrounding. To
increase the current in any given circuit, the number of cells in a battery is increased. There is
14
The gear assembly is connected to the DC motor in order to slow down that speed and
increase the talk. When the shaft is rotated, the resistors of the potentiometer of the changes.
This tells the servomotor to accurately determine the position. The difference between the
actual position and the desired position is fed into the control circuit in the form of error
signal. When there are signal zero this means that the servomotor has reached its desired
position and in that case no power supply to the DC motor. The directional control the
servomotor is possible through Pulse Width Modulation (PWM). In this the width of the
pulse determine the angle to which the shaft is to be rotated. For example, pulse of the width
for 2 milliseconds causes an angular displacement of 180°.
2.3.5 Battery
A battery is a device that has the capability to produce electricity as shown in figure 13.
There is a chemical reaction going on which converts the chemical energy into electrical
energy. The energy that is stored in the batteries is in the form of static energy unlike the
electricity which is a dynamic form. It continuously releases this energy for a set period of
time and after that the raw materials get exhausted and either it needs to be replaced or
recharged. A battery is a collection of many cells in each cell constitutes two electrodes and
the substance called as electrolyte. The electrodes are dipped into this electrolyte. One
electrode is marked as positive and the other is negative. To make it portable these electrodes
are covered including the electrolyte in a container from the external surrounding. To
increase the current in any given circuit, the number of cells in a battery is increased. There is
14

a confusion as to which electrode is called as anode and which is called as cathode. During
the process of electrolysis, by the application of external current the chemical splits at the
respective electrodes. In that case the negative electrode is the cathode and the positive one is
denoted but what really happens in a battery is the reverse of electrolysis, this means that
energy or the electricity is generated by the splitting of the chemical and so the term anode
and cathode are interchanged that is, in the case of battery the cathode is supposed to be
positive while the anode negative (Woodford, Batteries, 2018). When the battery is connected
to the external load, the electrolyte splits and the positive ions flows into the electrolyte while
the negative and hence from the negative electrode flows from the external circuit to the
positive electrode. Since, the flow of electrons is called as electricity, this way the external
load gets power while another reaction occurs at the positive electrode, recombination of the
positive ions and the negative ions making the circuit complete as shown in figure 14.
Figure 13 (Woodford, Batteries, 2018)
15
the process of electrolysis, by the application of external current the chemical splits at the
respective electrodes. In that case the negative electrode is the cathode and the positive one is
denoted but what really happens in a battery is the reverse of electrolysis, this means that
energy or the electricity is generated by the splitting of the chemical and so the term anode
and cathode are interchanged that is, in the case of battery the cathode is supposed to be
positive while the anode negative (Woodford, Batteries, 2018). When the battery is connected
to the external load, the electrolyte splits and the positive ions flows into the electrolyte while
the negative and hence from the negative electrode flows from the external circuit to the
positive electrode. Since, the flow of electrons is called as electricity, this way the external
load gets power while another reaction occurs at the positive electrode, recombination of the
positive ions and the negative ions making the circuit complete as shown in figure 14.
Figure 13 (Woodford, Batteries, 2018)
15

Figure 14 (Woodford, Batteries, 2018)
As discussed above, there are two types of batteries. The one which can be recharged again
and again called secondary batteries while the one that is disposed after one discharge are
called primary batteries. Secondary batteries are recharged when a reverse current is passed
through it. There are three types of primary batteries primarily-zinc carbon, lithium and
alkaline. These are called as dry cells because the electrolyte is not in the liquid form. In the
case of missing carbon batteries, the positive electrode is a carbon one while the negative
electrode is made up of zinc. The electrolyte is ammonium chloride. The positive electrode is
manganese oxide and the negative electrode is zinc in the case of alkaline batteries while the
electrolyte used is potassium hydroxide (Bates, 2012). The button cells used in watches and
other miniature devices have lithium and organic substances as their electrolytes while the
negative electrode is either zinc or lithium and positive electrode is made up of either copper
oxide, silver oxide or manganese oxide (Palermo, 2015). The secondary batteries include
lead-acid battery, nickel cadmium, nickel metal hydride, lithium iron and fuel cells. Lead acid
battery provides 12 V and have six cells producing towards each. Each cell has negative
electrode of light which is spongy in nature and lead dioxide make up the positive electrode
(Bellis, 2017). The electrodes are dipped in sulphuric acid. These are used in cars. Nickel
cadmium batteries are used to provide a constant voltage of 1.5 V. Nickel metal hydride
batteries are also used in gadgets like mobile phones but are not used much because of
cadmium which is not environment friendly. Lithium batteries have lithium cobalt oxide or
lithium iron phosphate as the positive electrode while the negative electrode is made up of
carbon. The electrolyte varies (Woodford, Lithium-ion batteries, 2018). Some batteries are
shown in figure 15.
16
As discussed above, there are two types of batteries. The one which can be recharged again
and again called secondary batteries while the one that is disposed after one discharge are
called primary batteries. Secondary batteries are recharged when a reverse current is passed
through it. There are three types of primary batteries primarily-zinc carbon, lithium and
alkaline. These are called as dry cells because the electrolyte is not in the liquid form. In the
case of missing carbon batteries, the positive electrode is a carbon one while the negative
electrode is made up of zinc. The electrolyte is ammonium chloride. The positive electrode is
manganese oxide and the negative electrode is zinc in the case of alkaline batteries while the
electrolyte used is potassium hydroxide (Bates, 2012). The button cells used in watches and
other miniature devices have lithium and organic substances as their electrolytes while the
negative electrode is either zinc or lithium and positive electrode is made up of either copper
oxide, silver oxide or manganese oxide (Palermo, 2015). The secondary batteries include
lead-acid battery, nickel cadmium, nickel metal hydride, lithium iron and fuel cells. Lead acid
battery provides 12 V and have six cells producing towards each. Each cell has negative
electrode of light which is spongy in nature and lead dioxide make up the positive electrode
(Bellis, 2017). The electrodes are dipped in sulphuric acid. These are used in cars. Nickel
cadmium batteries are used to provide a constant voltage of 1.5 V. Nickel metal hydride
batteries are also used in gadgets like mobile phones but are not used much because of
cadmium which is not environment friendly. Lithium batteries have lithium cobalt oxide or
lithium iron phosphate as the positive electrode while the negative electrode is made up of
carbon. The electrolyte varies (Woodford, Lithium-ion batteries, 2018). Some batteries are
shown in figure 15.
16
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

Figure 15 (Woodford, Batteries, 2018)
2.3.6 Regulator
A voltage regulator maintains the output voltage constant under any condition. Normally the
output voltage is not constant and it varies according to the operations in the input and. This
is further more due to noise from the power supply. It also ensures the safety (John, 2018). In
this project we will be using a very common voltage regulator IC 7805 (Electronicsforu,
2017). It is very useful in the applications where low power is enrolled. IC7805 is shown in
figure 16.
Figure 16 (Electronicsforu, 2017)
This IC takes from 7 V to 36 V and converts it into a constant 5 V output at 1 A. During this
conversion it acts as a resistor and therefore some power is dissipated but it finds application
where cost and complexity is to be kept in mind (Electronicshub, 2018).
2.3.7 Power Supply
The main supply received is around 220 V to 250 V AC. This energy is transmitted through
grids from substation and can be generated from various sources such as hydroelectric, tidal
or wind. It can be self-generated also using solar panels installed in the households. This
current has to be converted to DC after stepping it down to 12 V. This is done with the help
of a transformer rated as input to 20 V and output as 12 V. A transformer is a simple device
that transforms energy from one coil the other through mutual induction. In the primary coil
of the transformer the AC main is applied. The current that runs through the primary coil
induces a magnetic field around it which links to the secondary coil unconnected to the
primary coil externally but wounded on the same iron core (Ghosh, 2012), (Woodford,
17
2.3.6 Regulator
A voltage regulator maintains the output voltage constant under any condition. Normally the
output voltage is not constant and it varies according to the operations in the input and. This
is further more due to noise from the power supply. It also ensures the safety (John, 2018). In
this project we will be using a very common voltage regulator IC 7805 (Electronicsforu,
2017). It is very useful in the applications where low power is enrolled. IC7805 is shown in
figure 16.
Figure 16 (Electronicsforu, 2017)
This IC takes from 7 V to 36 V and converts it into a constant 5 V output at 1 A. During this
conversion it acts as a resistor and therefore some power is dissipated but it finds application
where cost and complexity is to be kept in mind (Electronicshub, 2018).
2.3.7 Power Supply
The main supply received is around 220 V to 250 V AC. This energy is transmitted through
grids from substation and can be generated from various sources such as hydroelectric, tidal
or wind. It can be self-generated also using solar panels installed in the households. This
current has to be converted to DC after stepping it down to 12 V. This is done with the help
of a transformer rated as input to 20 V and output as 12 V. A transformer is a simple device
that transforms energy from one coil the other through mutual induction. In the primary coil
of the transformer the AC main is applied. The current that runs through the primary coil
induces a magnetic field around it which links to the secondary coil unconnected to the
primary coil externally but wounded on the same iron core (Ghosh, 2012), (Woodford,
17

Electricity transformers, 2018). Due to the phenomena of electromagnetic induction,
induction current is induced in the secondary coil and hence the voltage. The unequal number
of turns in both the coils data mine the extent of stepping down of the voltage. This output
voltage of 10 V contains noise which can be eliminated in the voltage regulations stage
(Encyclopaedia Britannica, 2018).
2.3.8 Rectifier
It is a circuit that converts AC voltage to DC voltage with the help of diodes. In this project
we use a full wave bridge rectifier as shown in figure 17.
Figure 17 (Electronicshub, 2015)
It uses both the cycle of the AC supply and hence nothing is wasted unlike the half wave
rectifier. Hence it is much efficient. During the positive cycle of the AC current the two diets
that are facing just opposite to each other and forward biased and hence allows the current to
flow through the load. When there is a negative half cycle of basic rate, the two diodes that
were previously forward biased are now reverse biased and the diodes which were previously
reverse biased becomes forward biased to allow the current to flow. This way DC current is
obtained with the help of each half cycle of the AC current. IN 4001 diodes are used in the
construction of the bridge (Jojo, 2018), (Electronicshub, 2015).
2.3.9 Capacitors
Capacitors are the electronic components that stores electrical energy as shown in figure 18.
It works in a similar way yet different from the normal batteries. Both of them store electrical
18
induction current is induced in the secondary coil and hence the voltage. The unequal number
of turns in both the coils data mine the extent of stepping down of the voltage. This output
voltage of 10 V contains noise which can be eliminated in the voltage regulations stage
(Encyclopaedia Britannica, 2018).
2.3.8 Rectifier
It is a circuit that converts AC voltage to DC voltage with the help of diodes. In this project
we use a full wave bridge rectifier as shown in figure 17.
Figure 17 (Electronicshub, 2015)
It uses both the cycle of the AC supply and hence nothing is wasted unlike the half wave
rectifier. Hence it is much efficient. During the positive cycle of the AC current the two diets
that are facing just opposite to each other and forward biased and hence allows the current to
flow through the load. When there is a negative half cycle of basic rate, the two diodes that
were previously forward biased are now reverse biased and the diodes which were previously
reverse biased becomes forward biased to allow the current to flow. This way DC current is
obtained with the help of each half cycle of the AC current. IN 4001 diodes are used in the
construction of the bridge (Jojo, 2018), (Electronicshub, 2015).
2.3.9 Capacitors
Capacitors are the electronic components that stores electrical energy as shown in figure 18.
It works in a similar way yet different from the normal batteries. Both of them store electrical
18

energy but in the case of a battery there is a chemical reaction that is involved that liberates
energy which is then converted into electrical energy. But in the case of a capacitor the
energy static. There is a dielectric material between the two metals in the case of capacitors.
The batteries take more amount of time to release the little energy while a capacitor releases
it within a fraction of second this means that it is charges will quickly. Capacitors comes in
different shapes and sizes depending upon the storage capacity or the capacitance. The more
the value the greater data is its capacitance and vice versa. In this project we use two
capacitors of the values 0.1 μF. This capacitors remove the noise that comes from the power
supply so that the output voltage from the voltage regular IC 7805 is clean (Woodford,
Capacitors, 2018).
Figure 18 (Woodford, Capacitors, 2018)
2.4 Software Required
Arduino is the most popular development board based on microcontroller today. This is due
to the fact that it is an open source board that can be programmed using a very simple
programming language, C- language. Because it is an open source, it has a very large
community with continuously contribute in making it better and advanced. It contains a
microcontroller and depending upon the type of the mitochondrial are used these boards are
also many types (EEE Projects, 2017). In this project we are using Arduino Uno R3 which
has ATmgea328p as the microcontroller. Arduino can interact with the external environment,
it is very powerful and finds many applications today. Other boards are Arduino Nano,
Arduino Mega, Arduino lily pad, Arduino Leonardo and many more (Hussaini, 2017). To use
any hardware, software is needed. In the case of Arduino we use Arduino Integrated
Development Environment (IDE). This is a very simple platform to work on and uses a
language called as ‘Processing ’. It is based on C- language. Arduino IDE is free and can be
downloaded from the official Arduino website. It is a common software for all the Arduino
boards out there. The IDE is available for Windows, Mac and Linux. One thing should be
kept in mind that we install the correct version of Arduino in according to the operating
19
energy which is then converted into electrical energy. But in the case of a capacitor the
energy static. There is a dielectric material between the two metals in the case of capacitors.
The batteries take more amount of time to release the little energy while a capacitor releases
it within a fraction of second this means that it is charges will quickly. Capacitors comes in
different shapes and sizes depending upon the storage capacity or the capacitance. The more
the value the greater data is its capacitance and vice versa. In this project we use two
capacitors of the values 0.1 μF. This capacitors remove the noise that comes from the power
supply so that the output voltage from the voltage regular IC 7805 is clean (Woodford,
Capacitors, 2018).
Figure 18 (Woodford, Capacitors, 2018)
2.4 Software Required
Arduino is the most popular development board based on microcontroller today. This is due
to the fact that it is an open source board that can be programmed using a very simple
programming language, C- language. Because it is an open source, it has a very large
community with continuously contribute in making it better and advanced. It contains a
microcontroller and depending upon the type of the mitochondrial are used these boards are
also many types (EEE Projects, 2017). In this project we are using Arduino Uno R3 which
has ATmgea328p as the microcontroller. Arduino can interact with the external environment,
it is very powerful and finds many applications today. Other boards are Arduino Nano,
Arduino Mega, Arduino lily pad, Arduino Leonardo and many more (Hussaini, 2017). To use
any hardware, software is needed. In the case of Arduino we use Arduino Integrated
Development Environment (IDE). This is a very simple platform to work on and uses a
language called as ‘Processing ’. It is based on C- language. Arduino IDE is free and can be
downloaded from the official Arduino website. It is a common software for all the Arduino
boards out there. The IDE is available for Windows, Mac and Linux. One thing should be
kept in mind that we install the correct version of Arduino in according to the operating
19
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

system’s version for example if we have Windows 7 installed in our system, we cannot
download the Windows app version because it needs Windows 8.1 or 10. Arduino install the
USB drivers automatically and updates the library as well so there is no need to install it
externally and this makes the situation very easy for anyone even for non-professionals.
Starting of the IDE is shown in figure 19 (Rogers, 2016).
Figure 19
Arduino IDE is a very simple interface. There is a top menu which states the name of the
project which are working on along with the version of the Arduino installed on the system.
Below that there is a menu bar which contains the options of file, edit, sketch, tools and help
as shown in the figure 20.
20
download the Windows app version because it needs Windows 8.1 or 10. Arduino install the
USB drivers automatically and updates the library as well so there is no need to install it
externally and this makes the situation very easy for anyone even for non-professionals.
Starting of the IDE is shown in figure 19 (Rogers, 2016).
Figure 19
Arduino IDE is a very simple interface. There is a top menu which states the name of the
project which are working on along with the version of the Arduino installed on the system.
Below that there is a menu bar which contains the options of file, edit, sketch, tools and help
as shown in the figure 20.
20

Figure 20
Under the file menu there are the options as shown in the figure 21.
Figure 21
Under the file menu there is an option of ‘examples’ under which many codes are already
installed and given as a reference in the Arduino IDE as shown in figure 22. These codes can
be easily understood and implemented for beginners. These codes are of many peripheral
21
Under the file menu there are the options as shown in the figure 21.
Figure 21
Under the file menu there is an option of ‘examples’ under which many codes are already
installed and given as a reference in the Arduino IDE as shown in figure 22. These codes can
be easily understood and implemented for beginners. These codes are of many peripheral
21

devices that can be used with Arduino such as, LCD, servomotors, sensors, Ethernet and
many more.
Figure 22
Figure 23-26 shows various sections under different options of the menu bar.
Figure 23
22
many more.
Figure 22
Figure 23-26 shows various sections under different options of the menu bar.
Figure 23
22
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

Figure 24
Figure 25
23
Figure 25
23
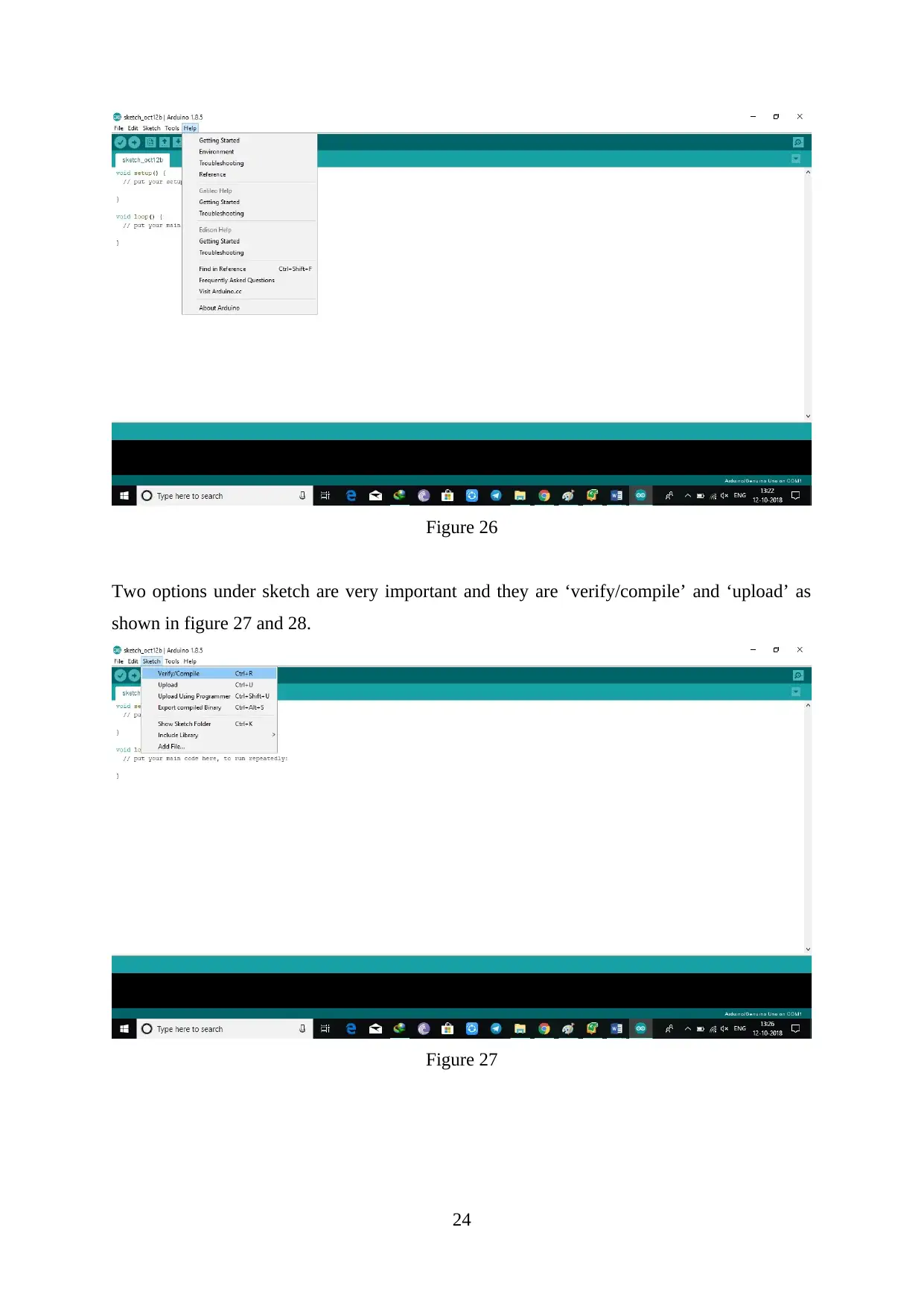
Figure 26
Two options under sketch are very important and they are ‘verify/compile’ and ‘upload’ as
shown in figure 27 and 28.
Figure 27
24
Two options under sketch are very important and they are ‘verify/compile’ and ‘upload’ as
shown in figure 27 and 28.
Figure 27
24

Figure 28
Compile option checks the code in terms of syntax and if then it says the code and confirms
the success in the bottom section of the IDE. ‘Upload’ option helps to transfer the code from
the system to the microcontroller. The inbuilt programmer of the Arduino does that and burns
the code. Arduino IDE provides a serial monitor as well and therefore no external serial
monitor is required during the project testing. This monitor is very simple as compared to any
serial monitor currently present in the market. The sketches can be shared easily and
improved by posting queries in Arduino forums. They can also be archived for future use.
Arduino IDE does not occupy much of the size of the disk because the software itself is very
lightweight. It provides the option of choosing the development board on which the court has
to be loaded upon (Maker.IO, 2018).
2.5 Layout Diagram
The layout is shown in the figure 29. It is designed using Proteus software. It consists of the
Arduino Uno R3 Development board (ATmega328p), LCD (LM016L), Transformer,
Rectifier (IN4001 diodes), capacitors (0.1 μF), voltage regulator IC, solar panel (5V), fuse
and servo motor (TowerPro SG90).
25
Compile option checks the code in terms of syntax and if then it says the code and confirms
the success in the bottom section of the IDE. ‘Upload’ option helps to transfer the code from
the system to the microcontroller. The inbuilt programmer of the Arduino does that and burns
the code. Arduino IDE provides a serial monitor as well and therefore no external serial
monitor is required during the project testing. This monitor is very simple as compared to any
serial monitor currently present in the market. The sketches can be shared easily and
improved by posting queries in Arduino forums. They can also be archived for future use.
Arduino IDE does not occupy much of the size of the disk because the software itself is very
lightweight. It provides the option of choosing the development board on which the court has
to be loaded upon (Maker.IO, 2018).
2.5 Layout Diagram
The layout is shown in the figure 29. It is designed using Proteus software. It consists of the
Arduino Uno R3 Development board (ATmega328p), LCD (LM016L), Transformer,
Rectifier (IN4001 diodes), capacitors (0.1 μF), voltage regulator IC, solar panel (5V), fuse
and servo motor (TowerPro SG90).
25
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Figure 29
The supply provides an AC current of 230 voltage to the full wave bridge wave rectifier
circuit consisting of the diodes IN 4001 as shown in the figure 26. A fuse of 1 A rating is also
connected so that the safety is ensured. The full wave bridge wave rectifier converts the AC
current into DC and supplies its output 12 V DC to the voltage regulator IC 7805. This IC
converts the 12 V to 5 V DC output. This is the source of power throughout the circuit for the
DC component is including Arduino Uno R3 development board. The output from the solar
panel taken is 5 V and it goes to the Analog pin a one of the Arduino Uno R3. The other pin
is grounded. The output pin from the servo motor goes to the PWM pin of the Arduino which
is 5 in the circuit and the power and ground pins are connected to the common power and
ground terminal is respectively. The supply pin of LCD is VDD and it is connected to +5 V
while the ground pin and the contrast pin VSS and VEE respectively are grounded. RS and
the enable pin are connected to the pins 13 and 12 of the Arduino Uno R3 while the data pins
from D4 to D7 are connected to the Arduino pins from 11 to 8 as shown in the figure 26. For
removing the noise from the supply, two capacitors of the value 0.1μF each is connected to
the +12V and +5V both terminals of the voltage regulator IC-7805.
2.6 Code
#include <LiquidCrystal.h>
#include <Servo.h>
int servo = 5; // servo on digital pin 5
int z;
26
The supply provides an AC current of 230 voltage to the full wave bridge wave rectifier
circuit consisting of the diodes IN 4001 as shown in the figure 26. A fuse of 1 A rating is also
connected so that the safety is ensured. The full wave bridge wave rectifier converts the AC
current into DC and supplies its output 12 V DC to the voltage regulator IC 7805. This IC
converts the 12 V to 5 V DC output. This is the source of power throughout the circuit for the
DC component is including Arduino Uno R3 development board. The output from the solar
panel taken is 5 V and it goes to the Analog pin a one of the Arduino Uno R3. The other pin
is grounded. The output pin from the servo motor goes to the PWM pin of the Arduino which
is 5 in the circuit and the power and ground pins are connected to the common power and
ground terminal is respectively. The supply pin of LCD is VDD and it is connected to +5 V
while the ground pin and the contrast pin VSS and VEE respectively are grounded. RS and
the enable pin are connected to the pins 13 and 12 of the Arduino Uno R3 while the data pins
from D4 to D7 are connected to the Arduino pins from 11 to 8 as shown in the figure 26. For
removing the noise from the supply, two capacitors of the value 0.1μF each is connected to
the +12V and +5V both terminals of the voltage regulator IC-7805.
2.6 Code
#include <LiquidCrystal.h>
#include <Servo.h>
int servo = 5; // servo on digital pin 5
int z;
26

int y = 1;
int x= 0;
int retpos;
int a= 0;
float Readvoltage [15]= { };
int Servoposition [15]= { };
int indexholder;
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
int newpos = 0; //new postion after selection of max voltage
int posangle=0;
int Voltage = A1; // select the input pin for the output of the solar panel
int VoltageValue = 0; // variable to store the value coming from the sensor
float volt;
LiquidCrystal lcd(13, 12, 11, 10, 9, 8); //Rs, En, D4, D5, D6, D7
void setup() {
Serial.begin (9600); // set baud rate to 9600
myservo.attach(servo); // attaches the servo on pin 3 to the servo object
pinMode (Voltage , INPUT); // set analog 1 as INPUT
lcd.begin (16 , 2);
lcd.print("SUN TRACKER ");
lcd.setCursor (0,1); // coloumn 2 row 2
lcd.print("SOLAR PANEL");
Serial.println("sun tracker solar panel");
delay (1000);
lcd.clear ();
delay (1000);
}
void loop() {
27
int x= 0;
int retpos;
int a= 0;
float Readvoltage [15]= { };
int Servoposition [15]= { };
int indexholder;
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
int newpos = 0; //new postion after selection of max voltage
int posangle=0;
int Voltage = A1; // select the input pin for the output of the solar panel
int VoltageValue = 0; // variable to store the value coming from the sensor
float volt;
LiquidCrystal lcd(13, 12, 11, 10, 9, 8); //Rs, En, D4, D5, D6, D7
void setup() {
Serial.begin (9600); // set baud rate to 9600
myservo.attach(servo); // attaches the servo on pin 3 to the servo object
pinMode (Voltage , INPUT); // set analog 1 as INPUT
lcd.begin (16 , 2);
lcd.print("SUN TRACKER ");
lcd.setCursor (0,1); // coloumn 2 row 2
lcd.print("SOLAR PANEL");
Serial.println("sun tracker solar panel");
delay (1000);
lcd.clear ();
delay (1000);
}
void loop() {
27

myservo.write(0);
for(pos = 0; pos <=108; pos += 12) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
int p = 0;
// myservo.write(pos);// tell servo to go to position in variable 'pos'
for(int r=myservo.read(); r!=pos; r++ )
{
myservo.write(r);
delay (50);
}
//Serial.print ("angle : ");
Serial.println (pos); // print position of servo to serial monitor
VoltageValue= analogRead (Voltage);
Readvoltage[x] = VoltageValue * (5.0/1023.0 );
lcd.setCursor (0, 0); // move lcd cursor to location on the lcd
lcd.print("Position ");
Serial.print("Position ");
lcd.setCursor (10, 0);
Serial.println(y);
lcd.print(y);
lcd.setCursor (0, 1);
lcd.print("voltage: ");
Serial.print ("voltage: ");
lcd.setCursor (9, 1);
lcd.print (Readvoltage[x]);
Serial.println (Readvoltage[x]);
x++;
y++;
delay(2000);// waits 15ms for the servo to reach the position
}
for(a=0; a<9; a++)
{
28
for(pos = 0; pos <=108; pos += 12) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
int p = 0;
// myservo.write(pos);// tell servo to go to position in variable 'pos'
for(int r=myservo.read(); r!=pos; r++ )
{
myservo.write(r);
delay (50);
}
//Serial.print ("angle : ");
Serial.println (pos); // print position of servo to serial monitor
VoltageValue= analogRead (Voltage);
Readvoltage[x] = VoltageValue * (5.0/1023.0 );
lcd.setCursor (0, 0); // move lcd cursor to location on the lcd
lcd.print("Position ");
Serial.print("Position ");
lcd.setCursor (10, 0);
Serial.println(y);
lcd.print(y);
lcd.setCursor (0, 1);
lcd.print("voltage: ");
Serial.print ("voltage: ");
lcd.setCursor (9, 1);
lcd.print (Readvoltage[x]);
Serial.println (Readvoltage[x]);
x++;
y++;
delay(2000);// waits 15ms for the servo to reach the position
}
for(a=0; a<9; a++)
{
28
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

Serial.print(Readvoltage[a]);
Serial.print (" : ");
Serial.println (Servoposition[a]);
delay(500);
}
a=0;
indexholder=1;
for (z=0; z<10; z++)
{
if(Readvoltage[z]>=Readvoltage[indexholder])
{
indexholder = z;
Serial.print("index holder: ");
Serial.println(indexholder);
z++;
}
}
newpos = Servoposition [indexholder];
Serial.println(newpos);
lcd.clear();
lcd.setCursor (0,0);
lcd.print("max_volt at angle:");
lcd.setCursor (0,1);
lcd.print(newpos);
delay (2000);
Serial.print("current pos ");
Serial.println(myservo.read());
lcd.clear ();
lcd.setCursor (0,0);
lcd.print ("Going to High");
lcd.setCursor(0,1);
lcd.print("Volt position...");
29
Serial.print (" : ");
Serial.println (Servoposition[a]);
delay(500);
}
a=0;
indexholder=1;
for (z=0; z<10; z++)
{
if(Readvoltage[z]>=Readvoltage[indexholder])
{
indexholder = z;
Serial.print("index holder: ");
Serial.println(indexholder);
z++;
}
}
newpos = Servoposition [indexholder];
Serial.println(newpos);
lcd.clear();
lcd.setCursor (0,0);
lcd.print("max_volt at angle:");
lcd.setCursor (0,1);
lcd.print(newpos);
delay (2000);
Serial.print("current pos ");
Serial.println(myservo.read());
lcd.clear ();
lcd.setCursor (0,0);
lcd.print ("Going to High");
lcd.setCursor(0,1);
lcd.print("Volt position...");
29

// myservo.write(newpos); // move servo to the position of max voltage
Serial.println("going to high volt pos");
if(myservo.read() != newpos)
{
for(int r=myservo.read(); r!=newpos; r-- )
{
// Serial.print("returning to high voltt");
// Serial.println(r);
myservo.write(r);
delay (50);
}
}
lcd.clear();
lcd.setCursor (2,0);
lcd.print ("MAX VOLTAGE");
lcd.setCursor (3,1);
lcd.print ("POSITION");
Serial.println ("MAX VOLTAGE");
delay (120000); // wait for 2 min
lcd.clear();
Serial.println("going to 0");
lcd.setCursor (0,0);
lcd.print("going to 0th");
lcd.setCursor (0,1 );
lcd.print ("Position........");
if(myservo.read() > 0)
{
for(int rz=myservo.read(); rz!=0; rz-- )
{
Serial.print("returning to 0");
Serial.println(rz);
myservo.write(rz);
delay (50);
}
30
Serial.println("going to high volt pos");
if(myservo.read() != newpos)
{
for(int r=myservo.read(); r!=newpos; r-- )
{
// Serial.print("returning to high voltt");
// Serial.println(r);
myservo.write(r);
delay (50);
}
}
lcd.clear();
lcd.setCursor (2,0);
lcd.print ("MAX VOLTAGE");
lcd.setCursor (3,1);
lcd.print ("POSITION");
Serial.println ("MAX VOLTAGE");
delay (120000); // wait for 2 min
lcd.clear();
Serial.println("going to 0");
lcd.setCursor (0,0);
lcd.print("going to 0th");
lcd.setCursor (0,1 );
lcd.print ("Position........");
if(myservo.read() > 0)
{
for(int rz=myservo.read(); rz!=0; rz-- )
{
Serial.print("returning to 0");
Serial.println(rz);
myservo.write(rz);
delay (50);
}
30

}
// for(retpos=newpos; retpos>=0; retpos-- )
// {
//
// Serial.print("returning to zero");
// Serial.println(retpos);
// delay (20);
// }
x=0;
y=1;
lcd.clear();
}
2.7 Hardware Testing
After the construction of the circuit it is necessary to check for any hardware issue because if
there is any hardware issue and in spite of being a very good project with a very good code, it
is not going to work and it will be a total waste. There are two simple methods to check this
and they are continuity test and power on test.
2.7.1 Continuity Test
In continuity test it is check that whether a given path is an open circuit or closed one simply
by either introducing apparel voltage or through multimeter. In the first case in LED or any
sound producing device such as a Piezo buzzer is connected in series with the path and
apparel voltage is applied. If the path is a closed one, the LED glows or the sound is produced
from the buzzer if not closed then it doesn’t happen and it can be easily understood that the
park is open. In the second case multimeter is used and this method is the widely used one.
The multimeter is set to continue to mode and the two terminals are connected across the
ends of the path. If a beep sound is heard then the park is closed, if no sound is heard then
either the multimeter is faulty or the path is opened. So, a light-emitting can be checked
whether simple piece of wire for testing the actual path and determine whether it is faulty or
not.
31
// for(retpos=newpos; retpos>=0; retpos-- )
// {
//
// Serial.print("returning to zero");
// Serial.println(retpos);
// delay (20);
// }
x=0;
y=1;
lcd.clear();
}
2.7 Hardware Testing
After the construction of the circuit it is necessary to check for any hardware issue because if
there is any hardware issue and in spite of being a very good project with a very good code, it
is not going to work and it will be a total waste. There are two simple methods to check this
and they are continuity test and power on test.
2.7.1 Continuity Test
In continuity test it is check that whether a given path is an open circuit or closed one simply
by either introducing apparel voltage or through multimeter. In the first case in LED or any
sound producing device such as a Piezo buzzer is connected in series with the path and
apparel voltage is applied. If the path is a closed one, the LED glows or the sound is produced
from the buzzer if not closed then it doesn’t happen and it can be easily understood that the
park is open. In the second case multimeter is used and this method is the widely used one.
The multimeter is set to continue to mode and the two terminals are connected across the
ends of the path. If a beep sound is heard then the park is closed, if no sound is heard then
either the multimeter is faulty or the path is opened. So, a light-emitting can be checked
whether simple piece of wire for testing the actual path and determine whether it is faulty or
not.
31
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

2.7.2 Power-On Test
In this test we check the voltage across the components present in the circuit. In the given
circuit as shown in figure 26, first of all we disconnect the microcontroller ends because
during this testing if there is an excess voltage then it may damage our microcontroller. After
removing the ends of the many controller, the voltage across the input ends of the transformer
is checked. The multimeter is used for this purpose and it is said to AC voltage measurement
mode. The voltage should come around to 220 V to 250 V. Next it is set to receive voltage
mode and then the voltage in the input and of the voltage at IC7805 is measured and it should
come 12 V. Similarly the output voltage should be around 5 V. Next the supply pin of the
LCD and servomotor is a subject and it should also come around 5 V. If all the voltage is fine
then we can connect the micro controller in the circuit. But remember that the supply and the
ground pin of the micro controller should not be shorted because after connecting the
microcontroller to circuit it will burn it.
32
In this test we check the voltage across the components present in the circuit. In the given
circuit as shown in figure 26, first of all we disconnect the microcontroller ends because
during this testing if there is an excess voltage then it may damage our microcontroller. After
removing the ends of the many controller, the voltage across the input ends of the transformer
is checked. The multimeter is used for this purpose and it is said to AC voltage measurement
mode. The voltage should come around to 220 V to 250 V. Next it is set to receive voltage
mode and then the voltage in the input and of the voltage at IC7805 is measured and it should
come 12 V. Similarly the output voltage should be around 5 V. Next the supply pin of the
LCD and servomotor is a subject and it should also come around 5 V. If all the voltage is fine
then we can connect the micro controller in the circuit. But remember that the supply and the
ground pin of the micro controller should not be shorted because after connecting the
microcontroller to circuit it will burn it.
32

3 Conclusion
From this project it can be easily concluded that the trapping of the solar energy is a very
necessary thing because the solar energy is at high demands today. Mostly this trapping is not
constant because at different times of the day the solar energy received is also different.
Through this project we can turn the solar panel to the direction where Sunnis positioned and
hence, a constant voltage output is obtained. This makes the use of solar energy to a greater
extent as compared to the previous technology. Arduino Uno R3 is an easy to code and use
development board today yet powerful. Using an individual microcontroller would be a
tedious task but Arduino Uno R3 serves the best purpose. As time is changing, the need of
renewable energy sources is increasing. Solar energy being the most abundant form of energy
is a greater interest among the researchers and new technologies are being brought
continuously so that optimisation is achieved. In the near for future the demand of solar
energy is going to increase and therefore these researchers, testing and development of the
Opera types will act as a boon.
33
From this project it can be easily concluded that the trapping of the solar energy is a very
necessary thing because the solar energy is at high demands today. Mostly this trapping is not
constant because at different times of the day the solar energy received is also different.
Through this project we can turn the solar panel to the direction where Sunnis positioned and
hence, a constant voltage output is obtained. This makes the use of solar energy to a greater
extent as compared to the previous technology. Arduino Uno R3 is an easy to code and use
development board today yet powerful. Using an individual microcontroller would be a
tedious task but Arduino Uno R3 serves the best purpose. As time is changing, the need of
renewable energy sources is increasing. Solar energy being the most abundant form of energy
is a greater interest among the researchers and new technologies are being brought
continuously so that optimisation is achieved. In the near for future the demand of solar
energy is going to increase and therefore these researchers, testing and development of the
Opera types will act as a boon.
33
References
Anish. (2018, July 25). Embedded Systems – An Introduction. Retrieved from
http://www.circuitstoday.com: http://www.circuitstoday.com/embedded-systems-an-
introduction
Apoorve. (2015, August 1). Servo Motor: Basics, Theory & Working Principle. Retrieved
from https://circuitdigest.com: https://circuitdigest.com/article/servo-motor-basics
Bates, M. (2012, May 1). How does a battery work? Retrieved from
https://engineering.mit.edu: https://engineering.mit.edu/engage/ask-an-engineer/how-
does-a-battery-work/
Bellis, M. (2017, April 6). How a Battery Works? Retrieved from
https://www.thoughtco.com: https://www.thoughtco.com/how-a-battery-works-
1991356
Bilal. (2017, October 9). Embedded Systems basics, characteristics and applications.
Retrieved from http://microcontrollerslab.com:
http://microcontrollerslab.com/embedded-systems-basics/
EEE Projects. (2017, June 15). Arduino Uno board – Full Description. Retrieved from
https://eeeproject.com: https://eeeproject.com/arduino-uno-board/
Electronics Hub. (2015, October 28). Servo Motor – Types and Working Principle. Retrieved
from https://www.electronicshub.org: https://www.electronicshub.org/servo-motors/
Electronicsforu. (2016, November 21). How 16×2 LCDs work | Build a basic 16×2
character LCD. Retrieved from https://electronicsforu.com:
https://electronicsforu.com/resources/learn-electronics/16x2-lcd-pinout-diagram
Electronicsforu. (2017, October 14). All About IC 7805 | Voltage Regulator. Retrieved from
https://electronicsforu.com:
https://electronicsforu.com/resources/learn-electronics/7805-ic-voltage-regulator
Electronicshub. (2015, October 26). Full Wave Bridge Rectifier. Retrieved from
https://www.electronicshub.org: https://www.electronicshub.org/full-wave-bridge-
rectifier/
Electronicshub. (2018, April 11). Understanding 7805 IC Voltage Regulator. Retrieved from
https://www.electronicshub.org: https://www.electronicshub.org/understanding-7805-
ic-voltage-regulator/
v
Anish. (2018, July 25). Embedded Systems – An Introduction. Retrieved from
http://www.circuitstoday.com: http://www.circuitstoday.com/embedded-systems-an-
introduction
Apoorve. (2015, August 1). Servo Motor: Basics, Theory & Working Principle. Retrieved
from https://circuitdigest.com: https://circuitdigest.com/article/servo-motor-basics
Bates, M. (2012, May 1). How does a battery work? Retrieved from
https://engineering.mit.edu: https://engineering.mit.edu/engage/ask-an-engineer/how-
does-a-battery-work/
Bellis, M. (2017, April 6). How a Battery Works? Retrieved from
https://www.thoughtco.com: https://www.thoughtco.com/how-a-battery-works-
1991356
Bilal. (2017, October 9). Embedded Systems basics, characteristics and applications.
Retrieved from http://microcontrollerslab.com:
http://microcontrollerslab.com/embedded-systems-basics/
EEE Projects. (2017, June 15). Arduino Uno board – Full Description. Retrieved from
https://eeeproject.com: https://eeeproject.com/arduino-uno-board/
Electronics Hub. (2015, October 28). Servo Motor – Types and Working Principle. Retrieved
from https://www.electronicshub.org: https://www.electronicshub.org/servo-motors/
Electronicsforu. (2016, November 21). How 16×2 LCDs work | Build a basic 16×2
character LCD. Retrieved from https://electronicsforu.com:
https://electronicsforu.com/resources/learn-electronics/16x2-lcd-pinout-diagram
Electronicsforu. (2017, October 14). All About IC 7805 | Voltage Regulator. Retrieved from
https://electronicsforu.com:
https://electronicsforu.com/resources/learn-electronics/7805-ic-voltage-regulator
Electronicshub. (2015, October 26). Full Wave Bridge Rectifier. Retrieved from
https://www.electronicshub.org: https://www.electronicshub.org/full-wave-bridge-
rectifier/
Electronicshub. (2018, April 11). Understanding 7805 IC Voltage Regulator. Retrieved from
https://www.electronicshub.org: https://www.electronicshub.org/understanding-7805-
ic-voltage-regulator/
v
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Encyclopaedia Britannica. (2018, September 27). Transformer. Retrieved from
https://www.britannica.com: https://www.britannica.com/technology/transformer-
electronics
Fonash , S. J., Fonash , T. R., & Ashok, S. (2018, September 11). Solar cell. Retrieved from
https://www.britannica.com: https://www.britannica.com/technology/solar-cell
Ghosh, S. (2012, February 24). What is Transformer? Definition and Principle of
Transformer. Retrieved from https://www.electrical4u.com:
https://www.electrical4u.com/what-is-transformer-definition-working-principle-of-
transformer/
Hussaini, U. (2017, September 21). Overview of the Arduino Uno hardware. Retrieved from
https://www.technobyte.org: https://www.technobyte.org/2016/08/overview-arduino-
uno-hardware/
John. (2018, August 9). Voltage Regulators. Retrieved from http://www.circuitstoday.com:
http://www.circuitstoday.com/voltage-regulators
Jojo. (2018, July 31). Full wave bridge rectifier. Retrieved from
http://www.circuitstoday.com: http://www.circuitstoday.com/full-wave-bridge-
rectifier
Keim, R. (2018, August 6). What Is Embedded System Design? Defining an Electrical
Engineering Field. Retrieved from https://www.allaboutcircuits.com:
https://www.allaboutcircuits.com/technical-articles/what-is-embedded-design-
embedded-system-design-firmware/
Maker.IO. (2018, March 27). Introduction to the Arduino IDE. Retrieved from
https://www.digikey.com:
https://www.digikey.com/en/maker/blogs/2018/introduction-to-the-arduino-ide
Meyers, G. (2011, September 30). How Do Solar Panels, Solar Cells and Solar Energy
Work? Retrieved from https://cleantechnica.com:
https://cleantechnica.com/2011/09/30/solar-basics-how-do-solar-panels-work/
Nasir, S. Z. (2016, November 5). 8 Things for Embedded Systems Programming. Retrieved
from https://www.theengineeringprojects.com:
https://www.theengineeringprojects.com/2016/11/things-learning-embedded-systems-
programming.html
Nasir, S. Z. (2017, August 4). Introduction to ATmega328- A complete step by step tutotial
on introduction to ATmega328. Retrieved from
vi
https://www.britannica.com: https://www.britannica.com/technology/transformer-
electronics
Fonash , S. J., Fonash , T. R., & Ashok, S. (2018, September 11). Solar cell. Retrieved from
https://www.britannica.com: https://www.britannica.com/technology/solar-cell
Ghosh, S. (2012, February 24). What is Transformer? Definition and Principle of
Transformer. Retrieved from https://www.electrical4u.com:
https://www.electrical4u.com/what-is-transformer-definition-working-principle-of-
transformer/
Hussaini, U. (2017, September 21). Overview of the Arduino Uno hardware. Retrieved from
https://www.technobyte.org: https://www.technobyte.org/2016/08/overview-arduino-
uno-hardware/
John. (2018, August 9). Voltage Regulators. Retrieved from http://www.circuitstoday.com:
http://www.circuitstoday.com/voltage-regulators
Jojo. (2018, July 31). Full wave bridge rectifier. Retrieved from
http://www.circuitstoday.com: http://www.circuitstoday.com/full-wave-bridge-
rectifier
Keim, R. (2018, August 6). What Is Embedded System Design? Defining an Electrical
Engineering Field. Retrieved from https://www.allaboutcircuits.com:
https://www.allaboutcircuits.com/technical-articles/what-is-embedded-design-
embedded-system-design-firmware/
Maker.IO. (2018, March 27). Introduction to the Arduino IDE. Retrieved from
https://www.digikey.com:
https://www.digikey.com/en/maker/blogs/2018/introduction-to-the-arduino-ide
Meyers, G. (2011, September 30). How Do Solar Panels, Solar Cells and Solar Energy
Work? Retrieved from https://cleantechnica.com:
https://cleantechnica.com/2011/09/30/solar-basics-how-do-solar-panels-work/
Nasir, S. Z. (2016, November 5). 8 Things for Embedded Systems Programming. Retrieved
from https://www.theengineeringprojects.com:
https://www.theengineeringprojects.com/2016/11/things-learning-embedded-systems-
programming.html
Nasir, S. Z. (2017, August 4). Introduction to ATmega328- A complete step by step tutotial
on introduction to ATmega328. Retrieved from
vi

https://www.theengineeringprojects.com:
https://www.theengineeringprojects.com/2017/08/introduction-to-atmega328.html
Palermo, E. (2015, April 5). How Do Batteries work? Retrieved from
https://www.livescience.com: https://www.livescience.com/50657-how-batteries-
work.html
Raj, A. (2015, October 24). 16x2 LCD Display Module. Retrieved from
https://circuitdigest.com: https://circuitdigest.com/article/16x2-lcd-display-module-
pinout-datasheet
Ravi. (2017, October 17). Basics of Embedded C Program. Retrieved from
https://www.electronicshub.org/: https://www.electronicshub.org/basics-of-
embedded-c-program/
RGS Energy. (2015, September 16). The basics of solar power . Retrieved from
https://rgsenergy.com: https://rgsenergy.com/how-solar-panels-work/the-basics-of-
solar-power/
Rogers, A. (2016, November 30). The Arduino Software – A Quick Introduction. Retrieved
from https://codeduino.com: https://codeduino.com/tutorials/the-arduino-software-a-
quick-introduction/
Sankar, J. (2017, June 11). Embedded Systems – An Overview. Retrieved from
https://electronicsforu.com: https://electronicsforu.com/resources/embedded-systems-
overview
Swaroop. (2018, July 24). What is Embedded System and How it Works? Retrieved from
https://www.codrey.com: https://www.codrey.com/embedded-systems/embedded-
systems-introduction/
Tawil, Y. (2016, July 1). Understanding Arduino UNO Hardware Design. Retrieved from
https://www.allaboutcircuits.com: https://www.allaboutcircuits.com/technical-
articles/understanding-arduino-uno-hardware-design/
Vysakh. (2018, July 25). Basics of Microcontrollers. Retrieved from
http://www.circuitstoday.com: http://www.circuitstoday.com/basics-of-
microcontrollers
Woodford, C. (2018, March 27). Batteries. Retrieved from https://www.explainthatstuff.com:
https://www.explainthatstuff.com/batteries.html
Woodford, C. (2018, March 30). Capacitors. Retrieved from
https://www.explainthatstuff.com: https://www.explainthatstuff.com/capacitors.html
vii
https://www.theengineeringprojects.com/2017/08/introduction-to-atmega328.html
Palermo, E. (2015, April 5). How Do Batteries work? Retrieved from
https://www.livescience.com: https://www.livescience.com/50657-how-batteries-
work.html
Raj, A. (2015, October 24). 16x2 LCD Display Module. Retrieved from
https://circuitdigest.com: https://circuitdigest.com/article/16x2-lcd-display-module-
pinout-datasheet
Ravi. (2017, October 17). Basics of Embedded C Program. Retrieved from
https://www.electronicshub.org/: https://www.electronicshub.org/basics-of-
embedded-c-program/
RGS Energy. (2015, September 16). The basics of solar power . Retrieved from
https://rgsenergy.com: https://rgsenergy.com/how-solar-panels-work/the-basics-of-
solar-power/
Rogers, A. (2016, November 30). The Arduino Software – A Quick Introduction. Retrieved
from https://codeduino.com: https://codeduino.com/tutorials/the-arduino-software-a-
quick-introduction/
Sankar, J. (2017, June 11). Embedded Systems – An Overview. Retrieved from
https://electronicsforu.com: https://electronicsforu.com/resources/embedded-systems-
overview
Swaroop. (2018, July 24). What is Embedded System and How it Works? Retrieved from
https://www.codrey.com: https://www.codrey.com/embedded-systems/embedded-
systems-introduction/
Tawil, Y. (2016, July 1). Understanding Arduino UNO Hardware Design. Retrieved from
https://www.allaboutcircuits.com: https://www.allaboutcircuits.com/technical-
articles/understanding-arduino-uno-hardware-design/
Vysakh. (2018, July 25). Basics of Microcontrollers. Retrieved from
http://www.circuitstoday.com: http://www.circuitstoday.com/basics-of-
microcontrollers
Woodford, C. (2018, March 27). Batteries. Retrieved from https://www.explainthatstuff.com:
https://www.explainthatstuff.com/batteries.html
Woodford, C. (2018, March 30). Capacitors. Retrieved from
https://www.explainthatstuff.com: https://www.explainthatstuff.com/capacitors.html
vii

Woodford, C. (2018, March 10). Electricity transformers. Retrieved from
https://www.explainthatstuff.com:
https://www.explainthatstuff.com/transformers.html
Woodford, C. (2018, August 3). Lithium-ion batteries. Retrieved from
https://www.explainthatstuff.com: https://www.explainthatstuff.com/how-lithium-ion-
batteries-work.html
Woodford, C. (2018, May 12). Solar cells. Retrieved from https://www.explainthatstuff.com:
https://www.explainthatstuff.com/solarcells.html
viii
https://www.explainthatstuff.com:
https://www.explainthatstuff.com/transformers.html
Woodford, C. (2018, August 3). Lithium-ion batteries. Retrieved from
https://www.explainthatstuff.com: https://www.explainthatstuff.com/how-lithium-ion-
batteries-work.html
Woodford, C. (2018, May 12). Solar cells. Retrieved from https://www.explainthatstuff.com:
https://www.explainthatstuff.com/solarcells.html
viii
1 out of 43
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
© 2024 | Zucol Services PVT LTD | All rights reserved.