Robot Control Systems Design: Kinematics, Dynamics, and Control
VerifiedAdded on 2022/08/27
|7
|702
|21
Homework Assignment
AI Summary
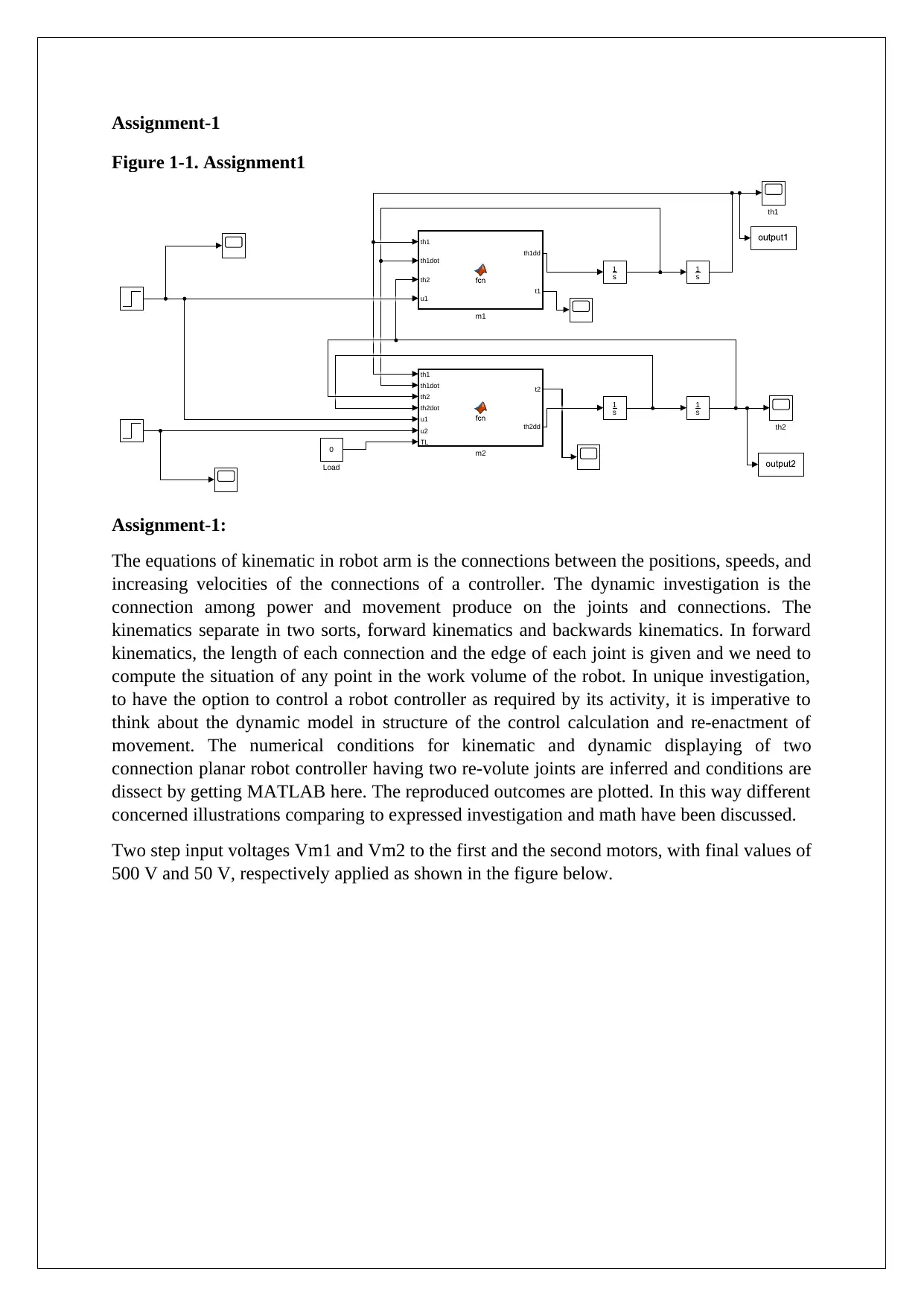
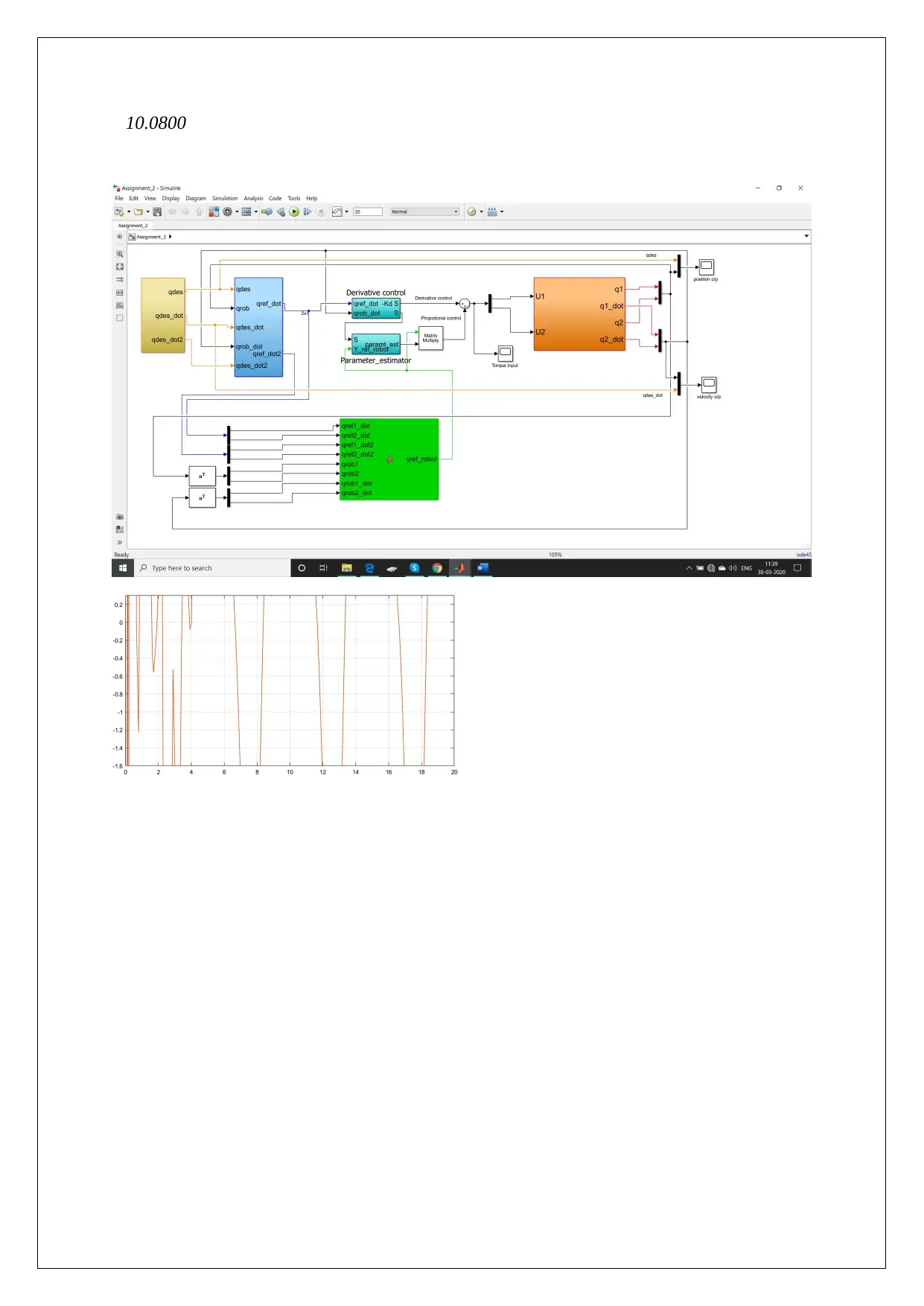
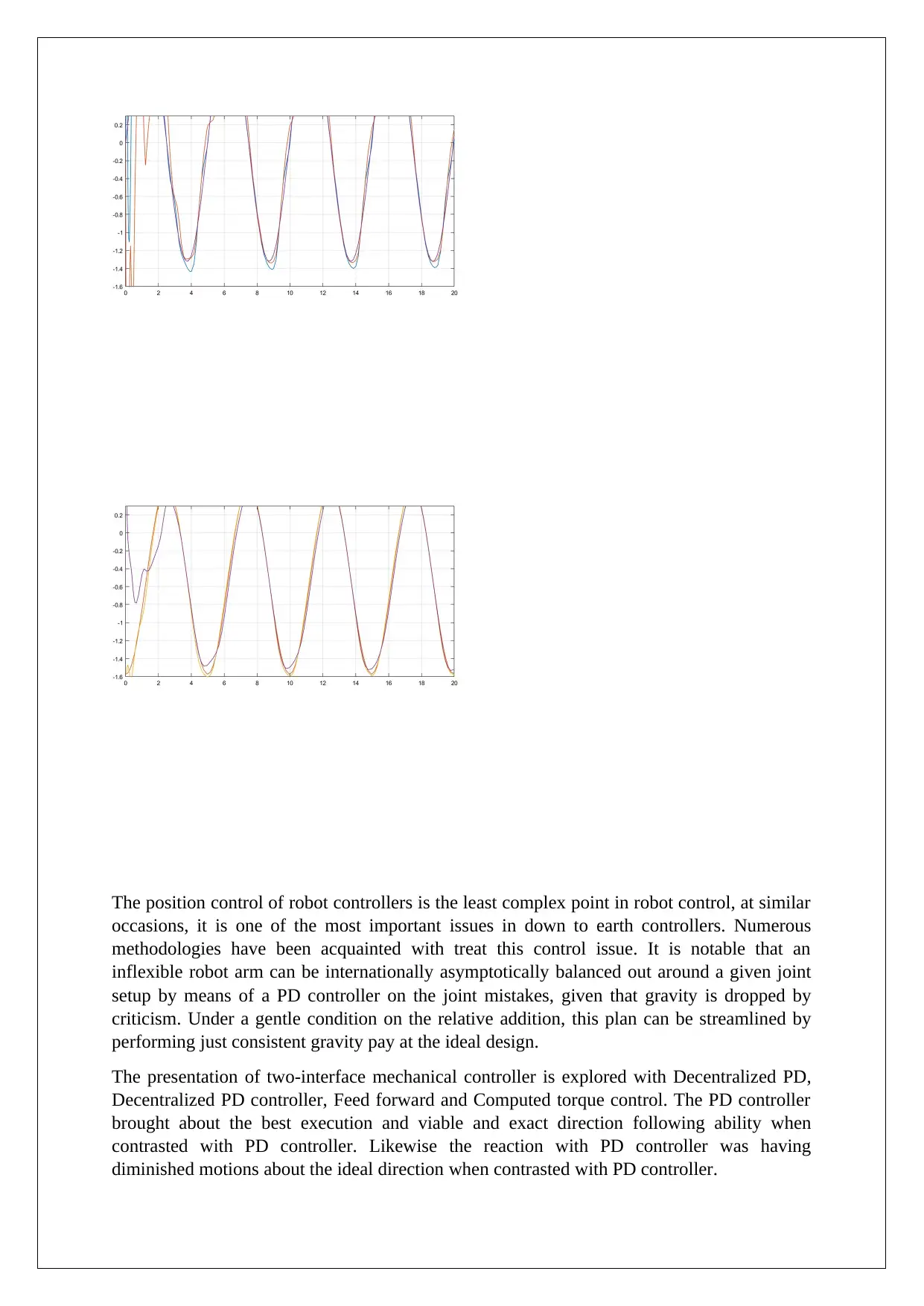
This document presents solutions for two assignments focused on robot control systems. Assignment 1 delves into the kinematics and dynamics of a two-link planar manipulator, deriving equations and analyzing the robot's behavior using MATLAB and Simulink, including the effects of motor input voltages and joint torques. Assignment 2 addresses trajectory tracking, a crucial aspect of robot control, and explores various control strategies such as PD control, decentralized PD control, feedforward, and computed torque control. The document highlights the effectiveness of PD control in achieving accurate trajectory following and presents relevant parameters and equations for the manipulator's dynamics. References to key research papers on robot control are also included.
1 out of 7
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.