Implementation of Dijkstra's Shortest Path Algorithm Using Arrays
VerifiedAdded on 2019/09/30
|4
|1819
|204
Report
AI Summary
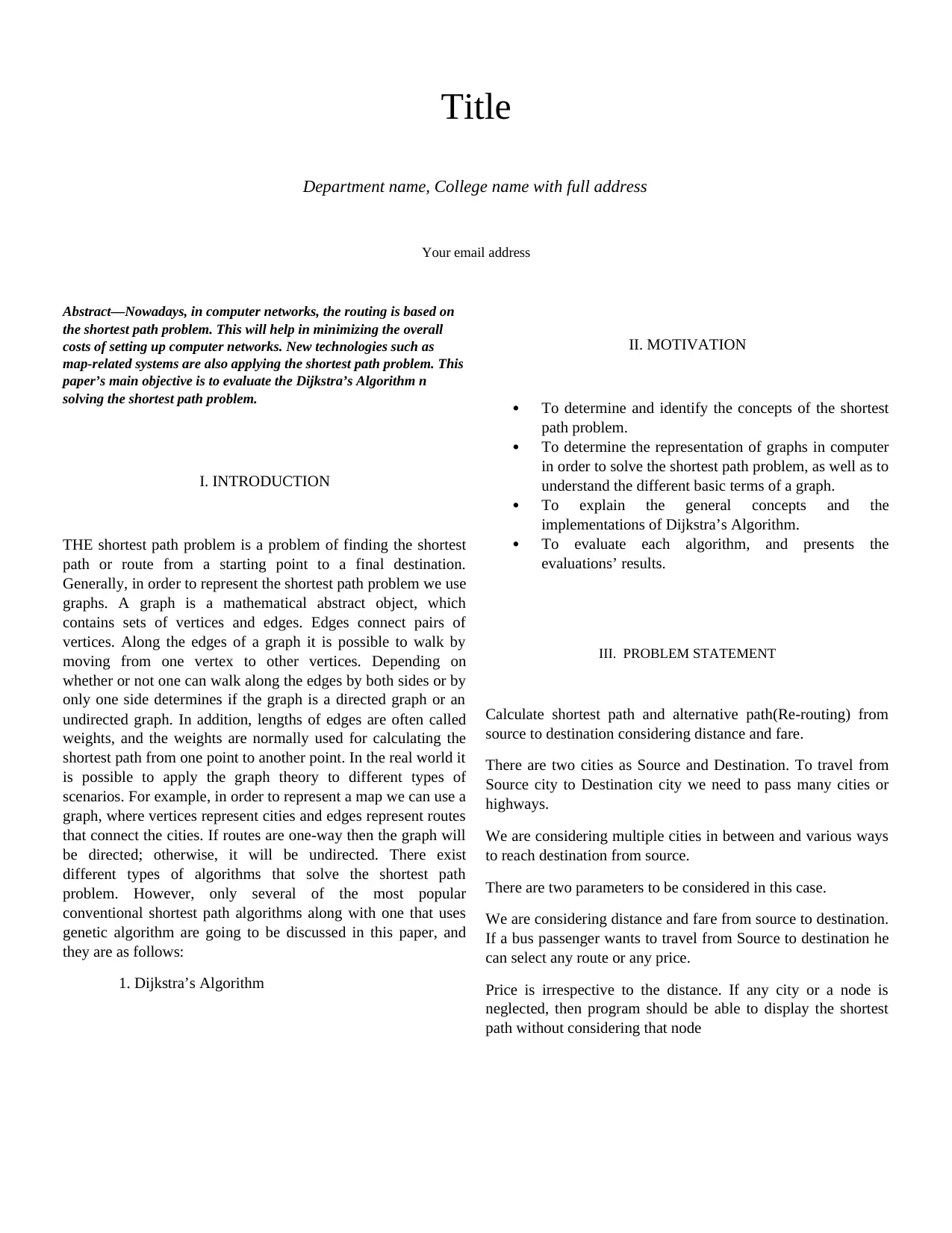
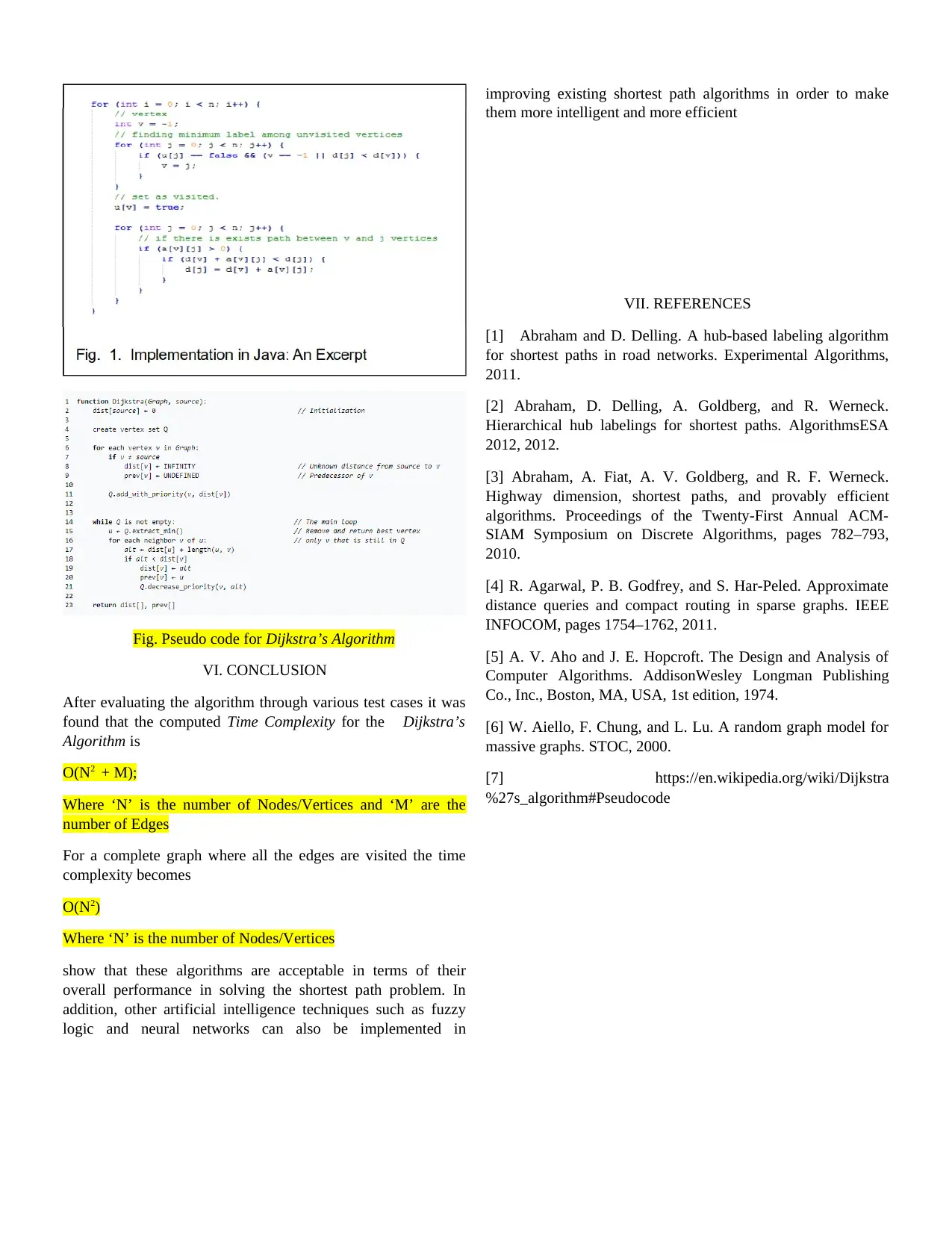
The content discusses Dijkstra's algorithm for finding the shortest path in a graph. It begins by explaining the difference between using an adjacency matrix and an array of edges to represent a graph, highlighting the benefits of the latter when dealing with multiple edges connecting two vertices. The algorithm is then described as assigning labels to each vertex, determining the minimal length from the starting point to other vertices, and identifying whether a vertex has been visited or not. The algorithm iterates n times, considering all unvisited neighbors of a chosen vertex and updating their labels accordingly. Finally, the article concludes by discussing the time complexity of Dijkstra's algorithm and its applications in solving shortest path problems.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.


1 out of 4
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
© 2024 | Zucol Services PVT LTD | All rights reserved.