University Project: Tricycle Mobile Robot Kinematics and Localization
VerifiedAdded on 2020/05/28
|23
|2747
|165
Project
AI Summary
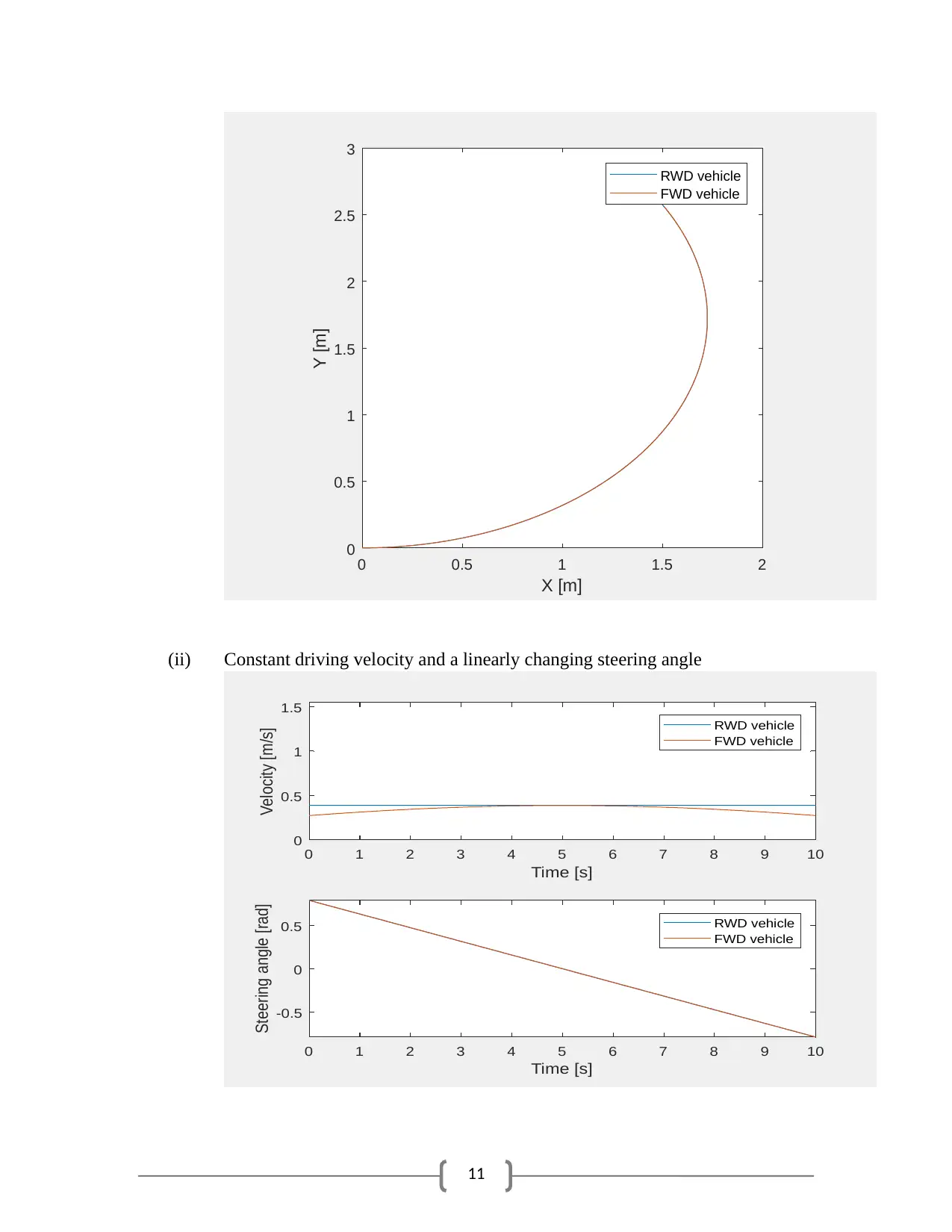
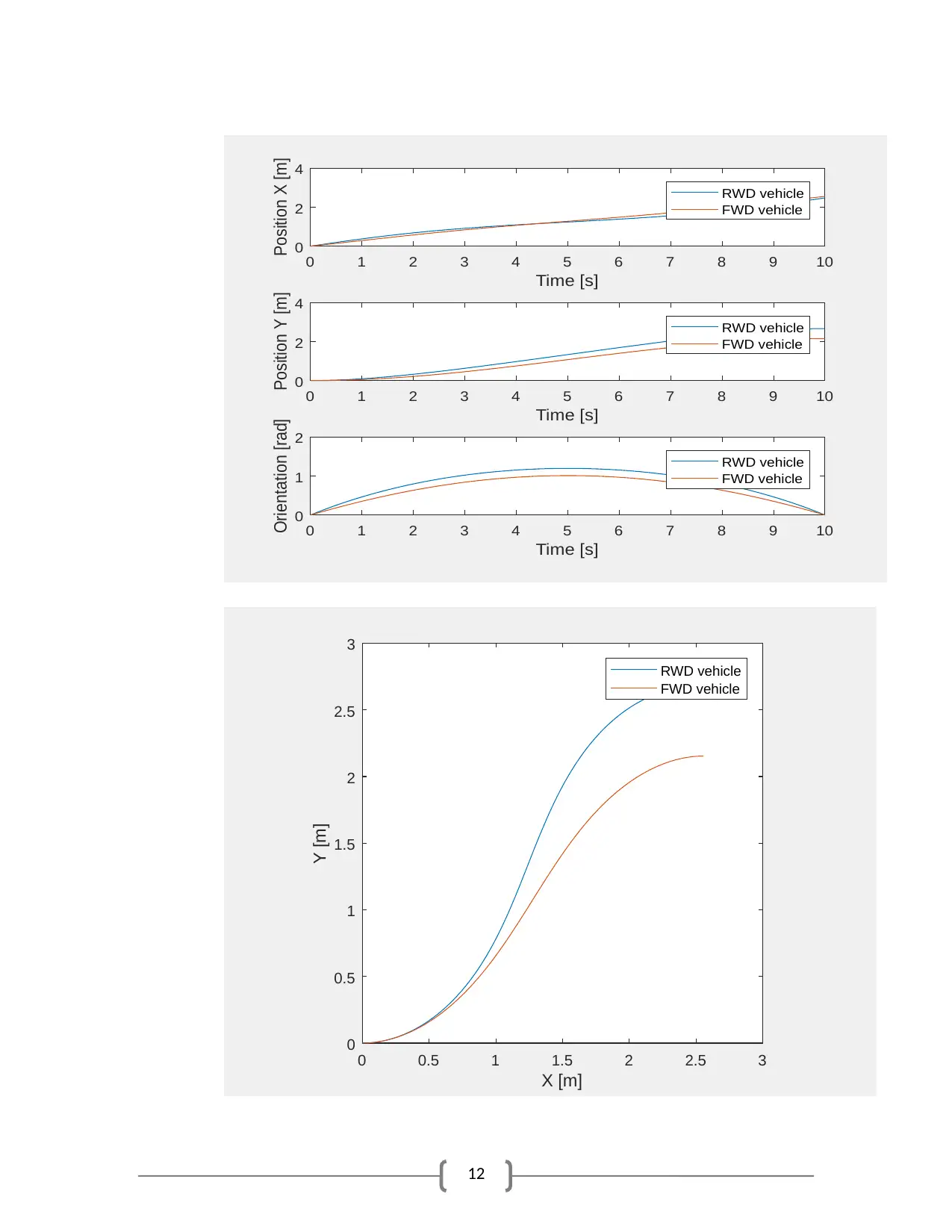
This project delves into the kinematic modeling of a tricycle mobile robot, a three-wheeled vehicle, focusing on its movement capabilities and limitations. The analysis includes deriving kinematic equations for both differential drive and synchronous drive robots, followed by simulations using MATLAB to demonstrate various driving modes, such as constant and linearly changing velocities and steering angles. The project further explores the localization of the tricycle-like robot using a particle filter, providing insights into the robot's position and velocity estimation. The study also compares the results obtained from the two models, discusses the minimum radius of curvature, and highlights the impact of different parameters on the tricycle's path during operation, including the effects of steering angle changes on velocity. Assumptions regarding wheel behavior and sensor measurements are discussed, providing a comprehensive understanding of the tricycle's kinematics and its application in mobile robotics.


1 out of 23



Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.