Advanced Electrical Machines and Drives Assignment Solution ENEE20002
VerifiedAdded on 2022/09/18
|7
|768
|23
Homework Assignment
AI Summary
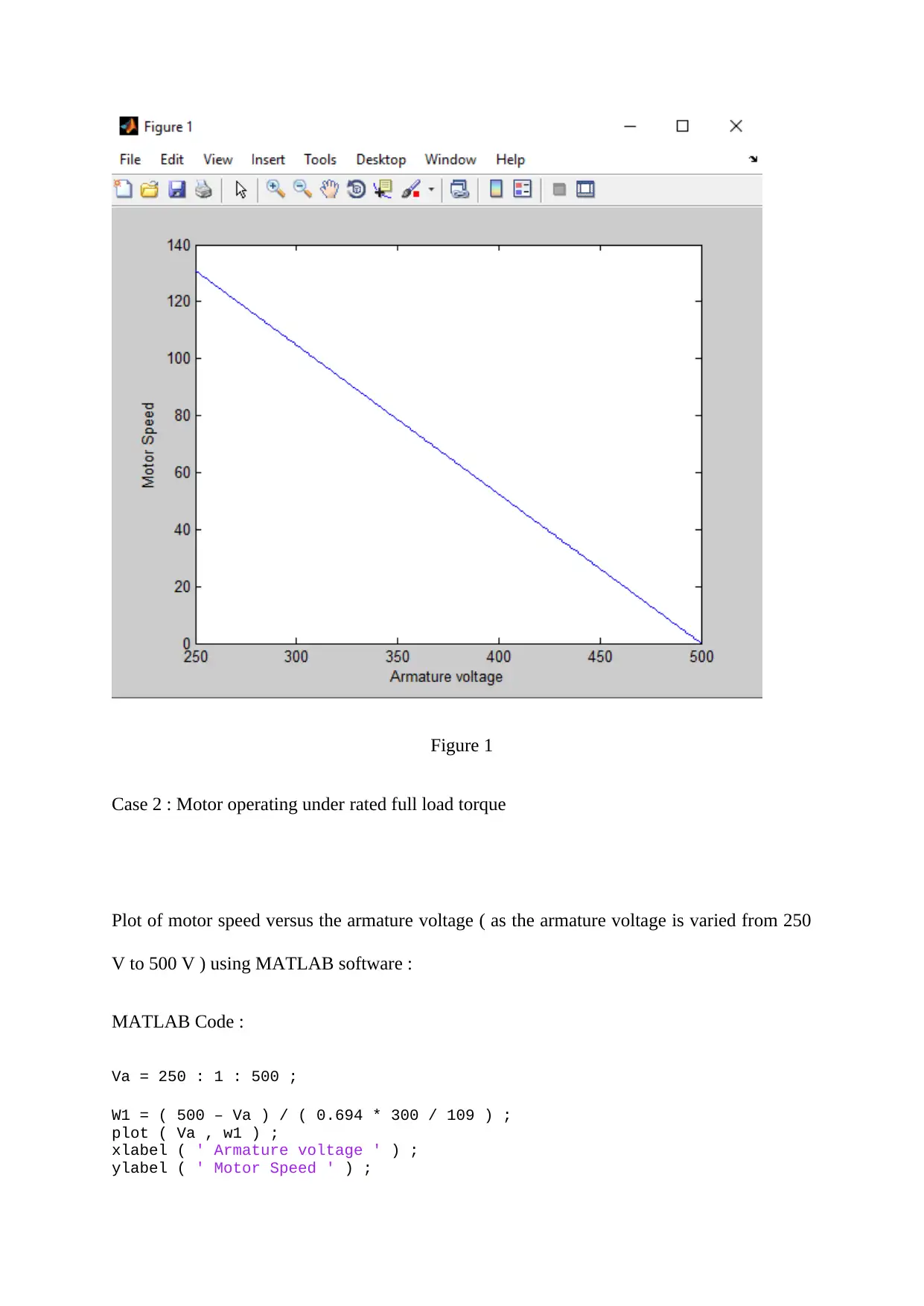
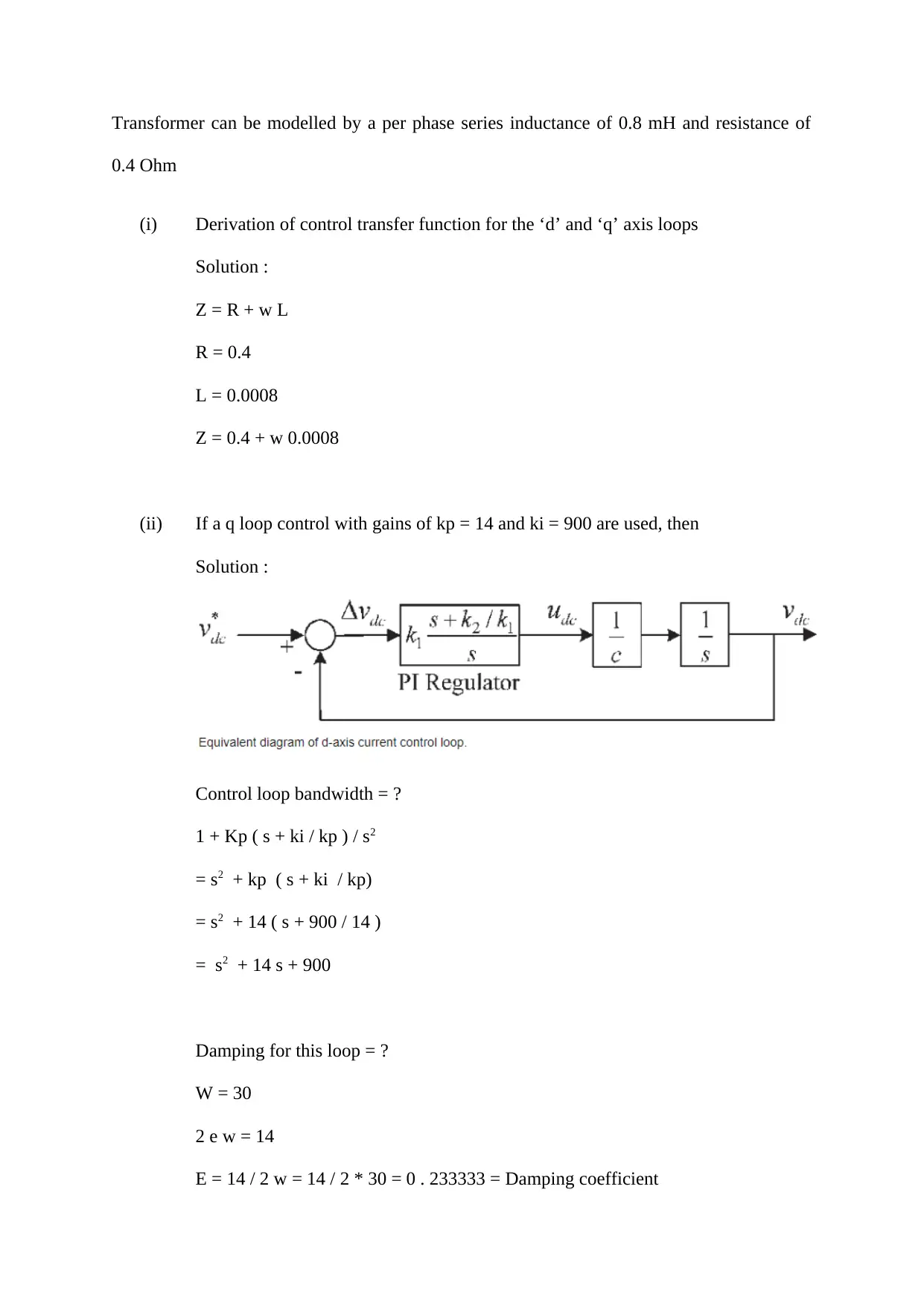
This assignment solution addresses problems related to advanced electrical machines and drives. The first part analyzes a separately excited DC motor, calculating and plotting motor speed versus armature voltage under no-load and full-load torque conditions using MATLAB. The second part focuses on an inverter connected to the utility network through a transformer, deriving the control transfer function for the d and q axis loops and calculating the control loop bandwidth and damping. Finally, the solution examines a balanced, positive-sequence, Y-connected voltage source applied to a balanced Y-connected resistive load, calculating voltages and currents at the load terminals. The solution provides detailed calculations and MATLAB code for each problem, offering a comprehensive understanding of the concepts.

1 out of 7
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.