MITS5509 Intelligent Systems: Anytime vs. Real-Time Search Report
VerifiedAdded on 2022/07/29
|13
|573
|18
Report
AI Summary
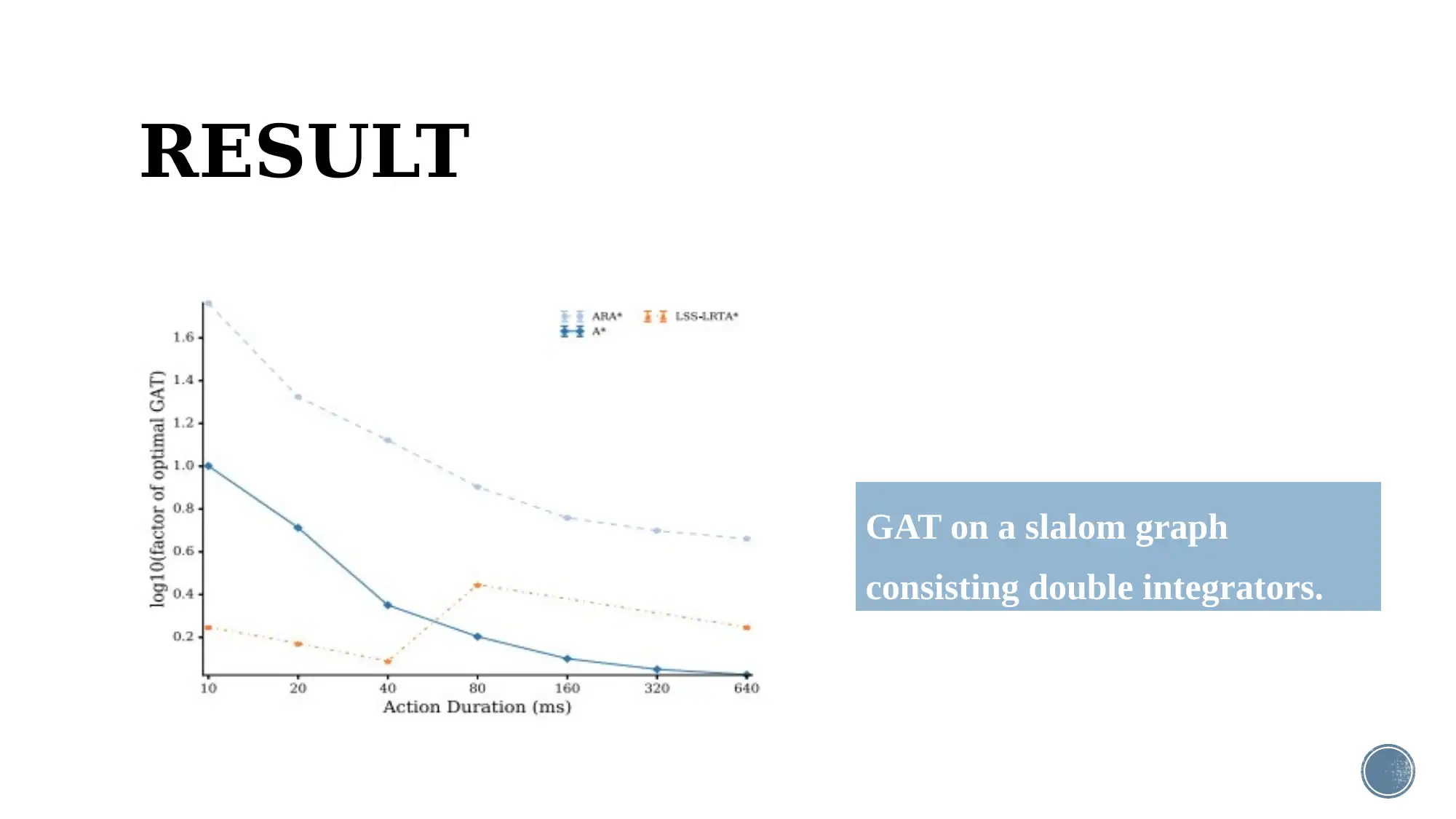
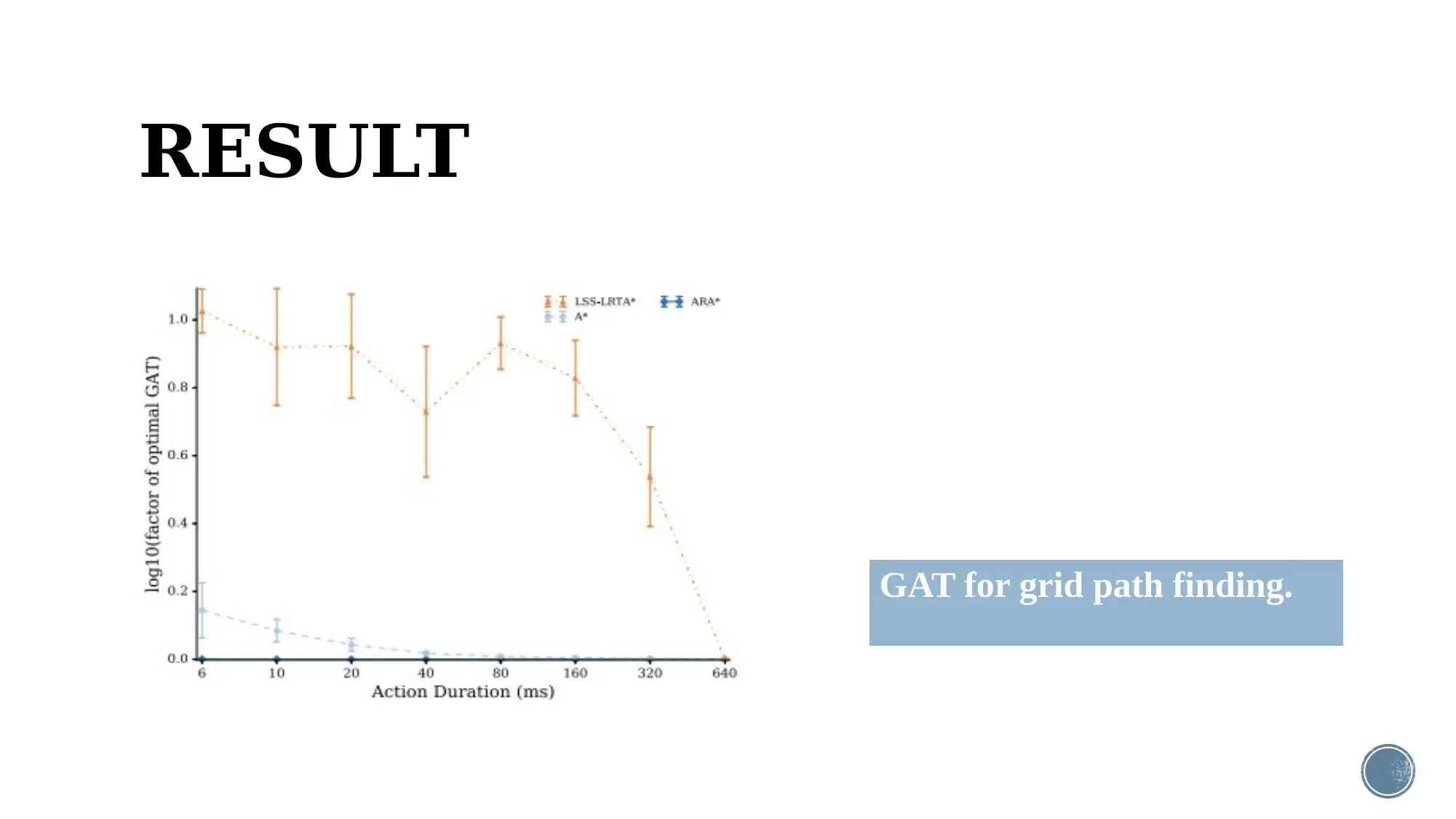
This report analyzes the efficiency of anytime and real-time heuristic search algorithms, focusing on their application in robotics and online planning. The research aims to determine the more effective search algorithm by evaluating their performance across various simulated domains, including an under-actuated double pendulum, a point robot with inertia, and grid pathfinding. The study reveals that the real-time heuristic search approach is more beneficial, offering faster goal achievement compared to the anytime search approach. The report emphasizes the importance of heuristic search in robotics and concludes that real-time searching algorithms are highly effective, although it acknowledges the limitations of incompleteness. The findings highlight real-time search as a promising direction for future research in heuristic search applications within robotics.
1 out of 13
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.