Southeast University: Intelligent Agent for Safe Driving with CNN
VerifiedAdded on 2023/03/30
|16
|3310
|402
Project
AI Summary
This project details the design and implementation of an intelligent agent aimed at enhancing driving safety by monitoring driver behavior and detecting potential distractions, particularly those related to mobile phone use. The project leverages Convolutional Neural Networks (CNN) to analyze driver postures and predict actions, with the goal of preventing accidents. The agent's design includes a prototype, pseudocode algorithm, and code implementation, demonstrating how CNN can be used to differentiate various driving postures, such as normal driving, responding to calls, smoking, and eating. The system incorporates various components, including percepts, actions, goals, and an environment, to effectively monitor and respond to driver actions. The project also discusses the legal implications of mobile phone use while driving and explores search-based techniques, like decision trees, to make informed decisions. The CNN model is trained and fine-tuned using a distributed filtering method, achieving high accuracy in identifying driver postures even under various road and lighting conditions. The project concludes by emphasizing the importance of such systems in reducing accidents and promoting safer driving habits.
qwertyuiopasdfghjklzxcvbnmqw
ertyuiopasdfghjklzxcvbnmqwert
yuiopasdfghjklzxcvbnmqwertyui
opasdfghjklzxcvbnmqwertyuiopa
sdfghjklzxcvbnmqwertyuiopasdf
ghjklzxcvbnmqwertyuiopasdfghj
klzxcvbnmqwertyuiopasdfghjklz
xcvbnmqwertyuiopasdfghjklzxcv
bnmqwertyuiopasdfghjklzxcvbn
mqwertyuiopasdfghjklzxcvbnmq
wertyuiopasdfghjklzxcvbnmqwer
tyuiopasdfghjklzxcvbnmqwertyui
opasdfghjklzxcvbnmqwertyuiopa
sdfghjklzxcvbnmqwertyuiopasdf
ghjklzxcvbnmqwertyuiopasdfghj
klzxcvbnmqwertyuiopasdfghjklz
xcvbnmrtyuiopasdfghjklzxcvbnm
qwertyuiopasdfghjklzxcvbnmqw
INTELLIGENT AGENT
ARTIFICIAL INTELLIGENCE
5/31/2019
ertyuiopasdfghjklzxcvbnmqwert
yuiopasdfghjklzxcvbnmqwertyui
opasdfghjklzxcvbnmqwertyuiopa
sdfghjklzxcvbnmqwertyuiopasdf
ghjklzxcvbnmqwertyuiopasdfghj
klzxcvbnmqwertyuiopasdfghjklz
xcvbnmqwertyuiopasdfghjklzxcv
bnmqwertyuiopasdfghjklzxcvbn
mqwertyuiopasdfghjklzxcvbnmq
wertyuiopasdfghjklzxcvbnmqwer
tyuiopasdfghjklzxcvbnmqwertyui
opasdfghjklzxcvbnmqwertyuiopa
sdfghjklzxcvbnmqwertyuiopasdf
ghjklzxcvbnmqwertyuiopasdfghj
klzxcvbnmqwertyuiopasdfghjklz
xcvbnmrtyuiopasdfghjklzxcvbnm
qwertyuiopasdfghjklzxcvbnmqw
INTELLIGENT AGENT
ARTIFICIAL INTELLIGENCE
5/31/2019
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Abstract
Driver’s basic perceptive procedure has long been documented because of the primary
conducive factors in guests’ injuries. It takes a glance at offerings singular device that applies
the convolution neural community (CNN) to automatically analyse and predict predefined
riding postures. The essential plan is to help the drivers to drive properly. In distinction to
older techniques, CNN will habitually know the way to differentiate functions directly from
raw photos. Within the authors' research, a CNN version becomes 1st retrained by the manner
of associate unattended characteristic gaining data of method known as distributed filtering
and later fine-tuned with a category. The approach becomes incontestable usage of the
Southeast University mistreatment posture info set that comprised videos covering four riding
postures, which are normal riding, responding to a cellular Smartphone decision, smoking
and eating. Compared to alternative noted processes with special photograph descriptors and
kind methods, the author’s scheme achieves nice performance with associate usual accuracy
of 99.78%. To gauge the generalization performance and effectiveness in additional wise
conditions, the approach equally examines the employment of alternative specifically
designed information units that recall of terrible illuminations and distinctive road conditions,
reaching associate traditional accuracy of ninety-nine, three and ninety-five, seventy-seven
percent, sequentially.
Driver’s basic perceptive procedure has long been documented because of the primary
conducive factors in guests’ injuries. It takes a glance at offerings singular device that applies
the convolution neural community (CNN) to automatically analyse and predict predefined
riding postures. The essential plan is to help the drivers to drive properly. In distinction to
older techniques, CNN will habitually know the way to differentiate functions directly from
raw photos. Within the authors' research, a CNN version becomes 1st retrained by the manner
of associate unattended characteristic gaining data of method known as distributed filtering
and later fine-tuned with a category. The approach becomes incontestable usage of the
Southeast University mistreatment posture info set that comprised videos covering four riding
postures, which are normal riding, responding to a cellular Smartphone decision, smoking
and eating. Compared to alternative noted processes with special photograph descriptors and
kind methods, the author’s scheme achieves nice performance with associate usual accuracy
of 99.78%. To gauge the generalization performance and effectiveness in additional wise
conditions, the approach equally examines the employment of alternative specifically
designed information units that recall of terrible illuminations and distinctive road conditions,
reaching associate traditional accuracy of ninety-nine, three and ninety-five, seventy-seven
percent, sequentially.
Contents
INTRODUCTION.....................................................................................................................................3
Driving...............................................................................................................................................3
Cell Phone Distraction to Driving.......................................................................................................3
Statistical Evidences...........................................................................................................................3
Driving Laws.......................................................................................................................................4
DESIGN..................................................................................................................................................4
Prototype Design...............................................................................................................................4
Intelligent Agent................................................................................................................................5
Steps..............................................................................................................................................6
Pseudocode Algorithm......................................................................................................................6
Code Implementation Using the CNN Algorithm...............................................................................7
CNN Algorithm...............................................................................................................................7
Purpose and Functionality of the Code..............................................................................................7
Components (Environment, Perceptron’s Actions, Functions, Attributes)........................................7
Agent Type.....................................................................................................................................8
Percepts.........................................................................................................................................8
Actions...........................................................................................................................................8
Goals..............................................................................................................................................8
Environment..................................................................................................................................8
Search Based Technique Used...........................................................................................................8
Decision Tree.....................................................................................................................................9
CONCLUSION.........................................................................................................................................9
REFERENCES........................................................................................................................................10
INTRODUCTION
Life is precious and invaluable than anything in the universe. Having said this the risks that
threaten sustainability of life must be minimized to the best possible extent, by maintaining
the lifestyle and manners accordingly.
Driving
Driving is movement of a motor vehicle, such as buses, trucks, cars and motorcycles, while
controlling the operation. The aspect of driving, in relation with safety of life should be
explored and best driving methods and habits must be determined, in order to minimize
accidents.
INTRODUCTION.....................................................................................................................................3
Driving...............................................................................................................................................3
Cell Phone Distraction to Driving.......................................................................................................3
Statistical Evidences...........................................................................................................................3
Driving Laws.......................................................................................................................................4
DESIGN..................................................................................................................................................4
Prototype Design...............................................................................................................................4
Intelligent Agent................................................................................................................................5
Steps..............................................................................................................................................6
Pseudocode Algorithm......................................................................................................................6
Code Implementation Using the CNN Algorithm...............................................................................7
CNN Algorithm...............................................................................................................................7
Purpose and Functionality of the Code..............................................................................................7
Components (Environment, Perceptron’s Actions, Functions, Attributes)........................................7
Agent Type.....................................................................................................................................8
Percepts.........................................................................................................................................8
Actions...........................................................................................................................................8
Goals..............................................................................................................................................8
Environment..................................................................................................................................8
Search Based Technique Used...........................................................................................................8
Decision Tree.....................................................................................................................................9
CONCLUSION.........................................................................................................................................9
REFERENCES........................................................................................................................................10
INTRODUCTION
Life is precious and invaluable than anything in the universe. Having said this the risks that
threaten sustainability of life must be minimized to the best possible extent, by maintaining
the lifestyle and manners accordingly.
Driving
Driving is movement of a motor vehicle, such as buses, trucks, cars and motorcycles, while
controlling the operation. The aspect of driving, in relation with safety of life should be
explored and best driving methods and habits must be determined, in order to minimize
accidents.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Accidents are possible with the following safety issues, while driving.
1. Texting and talking over phone, while driving
2. Sleep deprived driving
3. Speeding
4. Driving impaired by drugs directly or with influence
5. Reckless driving
6. Distracted driving
7. Street racing
All the above 7 factors have negative influence on driveability, which is the smooth delivery
of power.
Cell Phone Distraction to Driving
At any instance of time, there are about 660,000 drivers attempt using phones in hand, while
driving. Eventually, distraction rates for driving by cell phones are huge and alarmingly high.
Statistical Evidences
According to the reports of National Safety Council usage of cell, while driving result
more than 1.5 million crashes, every year.
Texting while driving cause injuries up to 390,000, from accidents, every year.
1 car accident out of 4 is caused by simultaneous driving and texting, in the United
States.
Cause of accident, while texting and driving is 6 times more likely, compared driving
while drunk.
The driver’s attention is taken away for 5 seconds, while answering a text and this
time is enough to travel the football field length, while travelling at the speed of 55
mph.
Compared to all other tasks related to cell phone, the most dangerous activity is
texting, by far.
74% of drivers wish and support ban over usage of hand-held cell phone.
94% of drivers wish and support ban over texting in the cell phone, while driving.
Driving Laws
To minimize the accidents, driving laws have been are defined and imposed, in almost all the
countries. Every driver, who comes on the road, is subject to the respective laws of the
jurisdiction, where the driver is driving.
And Australia government has imposed the law related to driving and using the mobile phone
and stated as follows.
“A driver of a vehicle can only touch a mobile phone to receive and terminate a phone call if
the phone is secured in a mounting affixed to the vehicle. If the phone is not secured in a
mounting, it can only be used to receive or terminate a phone call without touching it (e.g.
using voice activation, a Bluetooth hands-free car kit, ear piece or headset)”.
The law also indicates that…
1. Texting and talking over phone, while driving
2. Sleep deprived driving
3. Speeding
4. Driving impaired by drugs directly or with influence
5. Reckless driving
6. Distracted driving
7. Street racing
All the above 7 factors have negative influence on driveability, which is the smooth delivery
of power.
Cell Phone Distraction to Driving
At any instance of time, there are about 660,000 drivers attempt using phones in hand, while
driving. Eventually, distraction rates for driving by cell phones are huge and alarmingly high.
Statistical Evidences
According to the reports of National Safety Council usage of cell, while driving result
more than 1.5 million crashes, every year.
Texting while driving cause injuries up to 390,000, from accidents, every year.
1 car accident out of 4 is caused by simultaneous driving and texting, in the United
States.
Cause of accident, while texting and driving is 6 times more likely, compared driving
while drunk.
The driver’s attention is taken away for 5 seconds, while answering a text and this
time is enough to travel the football field length, while travelling at the speed of 55
mph.
Compared to all other tasks related to cell phone, the most dangerous activity is
texting, by far.
74% of drivers wish and support ban over usage of hand-held cell phone.
94% of drivers wish and support ban over texting in the cell phone, while driving.
Driving Laws
To minimize the accidents, driving laws have been are defined and imposed, in almost all the
countries. Every driver, who comes on the road, is subject to the respective laws of the
jurisdiction, where the driver is driving.
And Australia government has imposed the law related to driving and using the mobile phone
and stated as follows.
“A driver of a vehicle can only touch a mobile phone to receive and terminate a phone call if
the phone is secured in a mounting affixed to the vehicle. If the phone is not secured in a
mounting, it can only be used to receive or terminate a phone call without touching it (e.g.
using voice activation, a Bluetooth hands-free car kit, ear piece or headset)”.
The law also indicates that…
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

It is illegal for the driver of a vehicle to create, send or look at a text message, video
message, email or similar communication, even when the phone is secured in a mounting or
can be operated without touching it.
GPS may be used by a driver whilst driving if no touch of the keypad or screen is required.
Unlike NSW, in WA the same rules apply to all drivers, including L and P plate drivers.
… according to safety commission, 2019
These laws are the same for all the territories and states in entire Australia. The vehicle driver
mustn’t make use of the mobile phone no matter vehicle is stationary or moving, except while
the vehicle is parked. Sometimes the driver may be exempted from this law, because of
another law applied in the same jurisdiction. This law is not applicable in case the cell phone
gets mounted and securely fixed or positioned in a way, if a hands free device is used by the
driver. Learner drivers or provisional drivers are banned from using the mobile phone, in
some locations, while they attempt to control the vehicle.
Hence, there is a requirement to design a new detecting system that can monitor the activities
of the driver, especially, when using the mobile phone. Various activities performed with the
driver must be monitored closely and then the respective actions must be performed
accordingly. This intelligent system should be able to alert the driver with the warning
messages, when he or she attempts to operate the mobile, in restricted ways. The same
respective agent should also release penalty after throwing warning message to the driver.
This system can help the driver to drive the vehicle without operating the mobile, except
connecting the call or disconnecting the call, while the mobile phone is mounted to the stand
near the driving seat in the vehicle. Other operations, like texting the messages, gendering at
the instant messages and video messages are considered as unlawful actions.
DESIGN
Prototype Design
A prototype is a model, release or sample of a new product, built for testing a determined
process or concept to be learned or replicated from. A prototype helps in a new design
evaluation that helps to enhance precision by users and system analysts (Blackwell & Manar,
2015).
Intelligent Agent
The intelligent agent is designed to allow only two operations, connecting and disconnecting
the calls. This intelligent agent receives the inputs, processes the input and releases the
output. There are different ways input is accessed by the agent and different ways that each of
its output operation is performed.
A vehicle driver can use the cell phone and contact it only for two operations, accepting call
and ending calls. Initially, intelligent agent verifies whether the handset is verified in
mounting attached to the vehicle or not. It is important that the handset is mounted to the
vehicle, as it can eliminate the need for holding the cell phone with the hand, since hands of
driver are always busy holding the steering and gears. Attending and speaking over the phone
message, email or similar communication, even when the phone is secured in a mounting or
can be operated without touching it.
GPS may be used by a driver whilst driving if no touch of the keypad or screen is required.
Unlike NSW, in WA the same rules apply to all drivers, including L and P plate drivers.
… according to safety commission, 2019
These laws are the same for all the territories and states in entire Australia. The vehicle driver
mustn’t make use of the mobile phone no matter vehicle is stationary or moving, except while
the vehicle is parked. Sometimes the driver may be exempted from this law, because of
another law applied in the same jurisdiction. This law is not applicable in case the cell phone
gets mounted and securely fixed or positioned in a way, if a hands free device is used by the
driver. Learner drivers or provisional drivers are banned from using the mobile phone, in
some locations, while they attempt to control the vehicle.
Hence, there is a requirement to design a new detecting system that can monitor the activities
of the driver, especially, when using the mobile phone. Various activities performed with the
driver must be monitored closely and then the respective actions must be performed
accordingly. This intelligent system should be able to alert the driver with the warning
messages, when he or she attempts to operate the mobile, in restricted ways. The same
respective agent should also release penalty after throwing warning message to the driver.
This system can help the driver to drive the vehicle without operating the mobile, except
connecting the call or disconnecting the call, while the mobile phone is mounted to the stand
near the driving seat in the vehicle. Other operations, like texting the messages, gendering at
the instant messages and video messages are considered as unlawful actions.
DESIGN
Prototype Design
A prototype is a model, release or sample of a new product, built for testing a determined
process or concept to be learned or replicated from. A prototype helps in a new design
evaluation that helps to enhance precision by users and system analysts (Blackwell & Manar,
2015).
Intelligent Agent
The intelligent agent is designed to allow only two operations, connecting and disconnecting
the calls. This intelligent agent receives the inputs, processes the input and releases the
output. There are different ways input is accessed by the agent and different ways that each of
its output operation is performed.
A vehicle driver can use the cell phone and contact it only for two operations, accepting call
and ending calls. Initially, intelligent agent verifies whether the handset is verified in
mounting attached to the vehicle or not. It is important that the handset is mounted to the
vehicle, as it can eliminate the need for holding the cell phone with the hand, since hands of
driver are always busy holding the steering and gears. Attending and speaking over the phone
can be conducted by utilizing headset, Bluetooth or just without the need for holding the cell
phone.
In intelligent agent product, key persistence of prototyping is to include users, drivers, in this
context in taxing and gather opinions and reviews from clients, during initial levels so that the
period back is scaled and scale the value. The prototype allows the designer to be economical
and experimental with the same design and review the results. The changes that can be made
possible with the prototype do not need more money and resources, except the time.
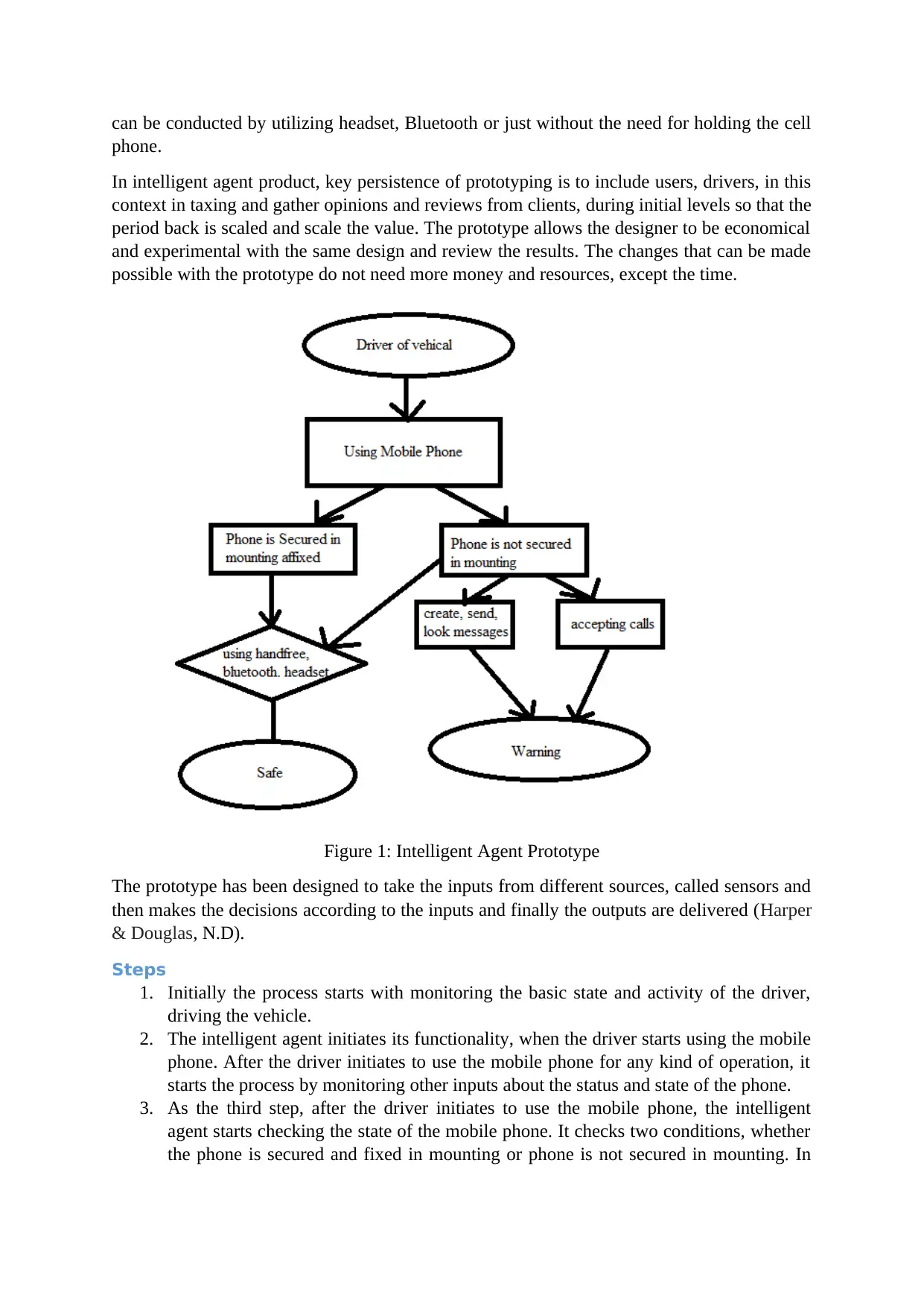
Figure 1: Intelligent Agent Prototype
The prototype has been designed to take the inputs from different sources, called sensors and
then makes the decisions according to the inputs and finally the outputs are delivered (Harper
& Douglas, N.D).
Steps
1. Initially the process starts with monitoring the basic state and activity of the driver,
driving the vehicle.
2. The intelligent agent initiates its functionality, when the driver starts using the mobile
phone. After the driver initiates to use the mobile phone for any kind of operation, it
starts the process by monitoring other inputs about the status and state of the phone.
3. As the third step, after the driver initiates to use the mobile phone, the intelligent
agent starts checking the state of the mobile phone. It checks two conditions, whether
the phone is secured and fixed in mounting or phone is not secured in mounting. In
phone.
In intelligent agent product, key persistence of prototyping is to include users, drivers, in this
context in taxing and gather opinions and reviews from clients, during initial levels so that the
period back is scaled and scale the value. The prototype allows the designer to be economical
and experimental with the same design and review the results. The changes that can be made
possible with the prototype do not need more money and resources, except the time.
Figure 1: Intelligent Agent Prototype
The prototype has been designed to take the inputs from different sources, called sensors and
then makes the decisions according to the inputs and finally the outputs are delivered (Harper
& Douglas, N.D).
Steps
1. Initially the process starts with monitoring the basic state and activity of the driver,
driving the vehicle.
2. The intelligent agent initiates its functionality, when the driver starts using the mobile
phone. After the driver initiates to use the mobile phone for any kind of operation, it
starts the process by monitoring other inputs about the status and state of the phone.
3. As the third step, after the driver initiates to use the mobile phone, the intelligent
agent starts checking the state of the mobile phone. It checks two conditions, whether
the phone is secured and fixed in mounting or phone is not secured in mounting. In
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
either cases, the intelligent agent takes two different processes, on the basis of
condition fulfilled.
4. As the fourth stage or fourth step, the agent checks whether the driver is using hands
free, Bluetooth or headset, it takes the output to the following stage. On the other
hand, if the phone is not secured in mounting it still checks whether the driver is using
handsfree, Bluetooth or headset, it passes the its results and outputs to the next stage.
And in case the phone is not secured in mounting and the driver does not use any
handsfree, Bluetooth or headset, the agent performs any one of the two actions, either
accepting the call or create, send or look for the messages.
5. As the final or fifth step, the agent outputs its results as ‘safe’ otherwise, it sends a
‘warning message’.
The entire functionality of the intelligent agent is performed in these three steps or stages.
PSEUDOCODE ALGORITHM
Driver of a vehical;
Using Mobile Phone;
if(During Driving){
Phone is not secure in mounting
While(Warning)
}
function driver-Agent([location,status]) returns an action
if status
= Using mobile phone during driving then return Warning
else if location
=
A then return Right
else if location
=
B then return Left
def driver-Agent(sensors):
if sensors[’status’] == ’Using mobile phone during driving’:
return ’Warning’
condition fulfilled.
4. As the fourth stage or fourth step, the agent checks whether the driver is using hands
free, Bluetooth or headset, it takes the output to the following stage. On the other
hand, if the phone is not secured in mounting it still checks whether the driver is using
handsfree, Bluetooth or headset, it passes the its results and outputs to the next stage.
And in case the phone is not secured in mounting and the driver does not use any
handsfree, Bluetooth or headset, the agent performs any one of the two actions, either
accepting the call or create, send or look for the messages.
5. As the final or fifth step, the agent outputs its results as ‘safe’ otherwise, it sends a
‘warning message’.
The entire functionality of the intelligent agent is performed in these three steps or stages.
PSEUDOCODE ALGORITHM
Driver of a vehical;
Using Mobile Phone;
if(During Driving){
Phone is not secure in mounting
While(Warning)
}
function driver-Agent([location,status]) returns an action
if status
= Using mobile phone during driving then return Warning
else if location
=
A then return Right
else if location
=
B then return Left
def driver-Agent(sensors):
if sensors[’status’] == ’Using mobile phone during driving’:
return ’Warning’
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
elif sensors[’location’] == ’A’:
return ’Right’
elif sensors[’location’] == ’B’:
return ’Left’
Agent Programs
Function driver(percept)returns action
Static driver, the driver drive a vehicle
memory ← UPDATE-MEMORY(memory, percept)
action ← CHOOSE-BEST-ACTION(memory)
memory ← UPDATE-MEMORY(memory, action)
return action
The pseudocode algorithm for intelligent agent performs its designed functions, in the
following ways.
Driver will need to understand and interpret where the vehicle is and is there anything else
standing on the road and the speed of the vehicle, with which it is running then. The driver
has to focus on driving in order to have good control over the vehicle. The driver should
ensure that the mobile phone is secured to the mounting, before even starting the vehicle.
Driver should only attempt to press a button or touch a button, to connect to answer the call
and the same to disconnect the call and these actions are accepted only when the driver makes
use of Bluetooth, hands-free, headset etc., to attend the call.
The algorithm ensures that each step of the prototype design is implemented using the
specified programming language.
CODE IMPLEMENTATION USING THE CNN ALGORITHM
CNN Algorithm
Convolutional Neural Network is a deep neural networks class that is applied for visual
image analysis. CNNs are multilayer perceptron’s regularized versions.
The difference between image classification algorithms and CNN algorithms is that the CNN
algorithms are pre-processed. Another major advantage of the CNN algorithm is that it is
independent from human effort and prior knowledge in the design feature. These algorithms
have various applications, including image classification, image and video recognition,
natural language processing, recommender systems and medical image analysis.
Here CNN algorithm has been adapted and implemented to image classification of the driver
and identify what kind of operation that the driver is performing. It detects the image and the
activities of the driver are interpreted. The activity of the driver can be driving, mobile
return ’Right’
elif sensors[’location’] == ’B’:
return ’Left’
Agent Programs
Function driver(percept)returns action
Static driver, the driver drive a vehicle
memory ← UPDATE-MEMORY(memory, percept)
action ← CHOOSE-BEST-ACTION(memory)
memory ← UPDATE-MEMORY(memory, action)
return action
The pseudocode algorithm for intelligent agent performs its designed functions, in the
following ways.
Driver will need to understand and interpret where the vehicle is and is there anything else
standing on the road and the speed of the vehicle, with which it is running then. The driver
has to focus on driving in order to have good control over the vehicle. The driver should
ensure that the mobile phone is secured to the mounting, before even starting the vehicle.
Driver should only attempt to press a button or touch a button, to connect to answer the call
and the same to disconnect the call and these actions are accepted only when the driver makes
use of Bluetooth, hands-free, headset etc., to attend the call.
The algorithm ensures that each step of the prototype design is implemented using the
specified programming language.
CODE IMPLEMENTATION USING THE CNN ALGORITHM
CNN Algorithm
Convolutional Neural Network is a deep neural networks class that is applied for visual
image analysis. CNNs are multilayer perceptron’s regularized versions.
The difference between image classification algorithms and CNN algorithms is that the CNN
algorithms are pre-processed. Another major advantage of the CNN algorithm is that it is
independent from human effort and prior knowledge in the design feature. These algorithms
have various applications, including image classification, image and video recognition,
natural language processing, recommender systems and medical image analysis.
Here CNN algorithm has been adapted and implemented to image classification of the driver
and identify what kind of operation that the driver is performing. It detects the image and the
activities of the driver are interpreted. The activity of the driver can be driving, mobile
operation, eating or talking, usually. Based on the image it detected, further algorithm is
processed.
The code is implemented with the help of CNN algorithm of driver deployed using
TensorFlow and Python.
Train The Network:
import numpy as np
import tensorflow as tf
from time import time
import math
from include.data import get_data_set
from include.model import model, lr
train_x, train_y = get_data_set("train")
test_x, test_y = get_data_set("test")
tf.set_random_seed(21)
x, y, output, y_pred_cls, global_step, learning_rate = model()
global_accuracy = 0
epoch_start = 0
# PARAMS
_BATCH_SIZE = 128
_EPOCH = 60
_SAVE_PATH = "./tensorboard/cifar-10-v1.0.0/"
processed.
The code is implemented with the help of CNN algorithm of driver deployed using
TensorFlow and Python.
Train The Network:
import numpy as np
import tensorflow as tf
from time import time
import math
from include.data import get_data_set
from include.model import model, lr
train_x, train_y = get_data_set("train")
test_x, test_y = get_data_set("test")
tf.set_random_seed(21)
x, y, output, y_pred_cls, global_step, learning_rate = model()
global_accuracy = 0
epoch_start = 0
# PARAMS
_BATCH_SIZE = 128
_EPOCH = 60
_SAVE_PATH = "./tensorboard/cifar-10-v1.0.0/"
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
# LOSS AND OPTIMIZER
loss = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits_v2(logits=output, labels=y))
optimizer = tf.train.AdamOptimizer(learning_rate=learning_rate,
beta1=0.9,
beta2=0.999,
epsilon=1e-08).minimize(loss, global_step=global_step)
# PREDICTION AND ACCURACY CALCULATION
correct_prediction = tf.equal(y_pred_cls, tf.argmax(y, axis=1))
accuracy = tf.reduce_mean(tf.cast(correct_prediction, tf.float32))
# SAVER
merged = tf.summary.merge_all()
saver = tf.train.Saver()
sess = tf.Session()
train_writer = tf.summary.FileWriter(_SAVE_PATH, sess.graph)
try:
print("
Trying to restore last checkpoint ...")
last_chk_path = tf.train.latest_checkpoint(checkpoint_dir=_SAVE_PATH)
saver.restore(sess, save_path=last_chk_path)
print("Restored checkpoint from:", last_chk_path)
except ValueError:
print("
Failed to restore checkpoint. Initializing variables instead.")
sess.run(tf.global_variables_initializer())
loss = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits_v2(logits=output, labels=y))
optimizer = tf.train.AdamOptimizer(learning_rate=learning_rate,
beta1=0.9,
beta2=0.999,
epsilon=1e-08).minimize(loss, global_step=global_step)
# PREDICTION AND ACCURACY CALCULATION
correct_prediction = tf.equal(y_pred_cls, tf.argmax(y, axis=1))
accuracy = tf.reduce_mean(tf.cast(correct_prediction, tf.float32))
# SAVER
merged = tf.summary.merge_all()
saver = tf.train.Saver()
sess = tf.Session()
train_writer = tf.summary.FileWriter(_SAVE_PATH, sess.graph)
try:
print("
Trying to restore last checkpoint ...")
last_chk_path = tf.train.latest_checkpoint(checkpoint_dir=_SAVE_PATH)
saver.restore(sess, save_path=last_chk_path)
print("Restored checkpoint from:", last_chk_path)
except ValueError:
print("
Failed to restore checkpoint. Initializing variables instead.")
sess.run(tf.global_variables_initializer())
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
def train(epoch):
global epoch_start
epoch_start = time()
batch_size = int(math.ceil(len(train_x) / _BATCH_SIZE))
i_global = 0
for s in range(batch_size):
batch_xs = train_x[s*_BATCH_SIZE: (s+1)*_BATCH_SIZE]
batch_ys = train_y[s*_BATCH_SIZE: (s+1)*_BATCH_SIZE]
start_time = time()
i_global, _, batch_loss, batch_acc = sess.run(
[global_step, optimizer, loss, accuracy],
feed_dict={x: batch_xs, y: batch_ys, learning_rate: lr(epoch)})
duration = time() - start_time
if s % 10 == 0:
percentage = int(round((s/batch_size)*100))
bar_len = 29
filled_len = int((bar_len*int(percentage))/100)
bar = '=' * filled_len + '>' + '-' * (bar_len - filled_len)
msg = "Global step: {:>5} - [{}] {:>3}% - acc: {:.4f} - loss: {:.4f} - {:.1f} sample/sec"
print(msg.format(i_global, bar, percentage, batch_acc, batch_loss, _BATCH_SIZE / duration))
test_and_save(i_global, epoch)
global epoch_start
epoch_start = time()
batch_size = int(math.ceil(len(train_x) / _BATCH_SIZE))
i_global = 0
for s in range(batch_size):
batch_xs = train_x[s*_BATCH_SIZE: (s+1)*_BATCH_SIZE]
batch_ys = train_y[s*_BATCH_SIZE: (s+1)*_BATCH_SIZE]
start_time = time()
i_global, _, batch_loss, batch_acc = sess.run(
[global_step, optimizer, loss, accuracy],
feed_dict={x: batch_xs, y: batch_ys, learning_rate: lr(epoch)})
duration = time() - start_time
if s % 10 == 0:
percentage = int(round((s/batch_size)*100))
bar_len = 29
filled_len = int((bar_len*int(percentage))/100)
bar = '=' * filled_len + '>' + '-' * (bar_len - filled_len)
msg = "Global step: {:>5} - [{}] {:>3}% - acc: {:.4f} - loss: {:.4f} - {:.1f} sample/sec"
print(msg.format(i_global, bar, percentage, batch_acc, batch_loss, _BATCH_SIZE / duration))
test_and_save(i_global, epoch)
def test_and_save(_global_step, epoch):
global global_accuracy
global epoch_start
i = 0
predicted_class = np.zeros(shape=len(test_x), dtype=np.int)
while i<len(test_x): j = min(i + _BATCH_SIZE, len(test_x)) batch_xs = test_x[i:j, :] batch_ys = test_y[i:j, :] predicted_class[i:j] =
sess.run( y_pred_cls, feed_dict={x: batch_xs, y: batch_ys, learning_rate: lr(epoch)} ) i = j correct = (np.argmax(test_y, axis=1) ==
predicted_class) acc = correct.mean()*100 correct_numbers = correct.sum() hours, rem = divmod(time() - epoch_start, 3600) minutes,
seconds = divmod(rem, 60) mes = "
Epoch {} - accuracy: {:.2f}% ({}/{}) - time: {:0>2}:{:0>2}:{:05.2f}"
print(mes.format((epoch+1), acc, correct_numbers, len(test_x), int(hours), int(minutes), seconds))
if global_accuracy != 0 and global_accuracy< acc: summary = tf.Summary(value=[ tf.Summary.Value(tag="Accuracy/test",
simple_value=acc), ]) train_writer.add_summary(summary, _global_step) saver.save(sess, save_path=_SAVE_PATH,
global_step=_global_step) mes = "This epoch receive better accuracy: {:.2f} > {:.2f}. Saving session..."
print(mes.format(acc, global_accuracy))
global_accuracy = acc
elifglobal_accuracy == 0:
global_accuracy = acc
print("#########################################################################################################
##")
def main():
train_start = time()
for i in range(_EPOCH):
print("
Epoch: {}/{}
".format((i+1), _EPOCH))
global global_accuracy
global epoch_start
i = 0
predicted_class = np.zeros(shape=len(test_x), dtype=np.int)
while i<len(test_x): j = min(i + _BATCH_SIZE, len(test_x)) batch_xs = test_x[i:j, :] batch_ys = test_y[i:j, :] predicted_class[i:j] =
sess.run( y_pred_cls, feed_dict={x: batch_xs, y: batch_ys, learning_rate: lr(epoch)} ) i = j correct = (np.argmax(test_y, axis=1) ==
predicted_class) acc = correct.mean()*100 correct_numbers = correct.sum() hours, rem = divmod(time() - epoch_start, 3600) minutes,
seconds = divmod(rem, 60) mes = "
Epoch {} - accuracy: {:.2f}% ({}/{}) - time: {:0>2}:{:0>2}:{:05.2f}"
print(mes.format((epoch+1), acc, correct_numbers, len(test_x), int(hours), int(minutes), seconds))
if global_accuracy != 0 and global_accuracy< acc: summary = tf.Summary(value=[ tf.Summary.Value(tag="Accuracy/test",
simple_value=acc), ]) train_writer.add_summary(summary, _global_step) saver.save(sess, save_path=_SAVE_PATH,
global_step=_global_step) mes = "This epoch receive better accuracy: {:.2f} > {:.2f}. Saving session..."
print(mes.format(acc, global_accuracy))
global_accuracy = acc
elifglobal_accuracy == 0:
global_accuracy = acc
print("#########################################################################################################
##")
def main():
train_start = time()
for i in range(_EPOCH):
print("
Epoch: {}/{}
".format((i+1), _EPOCH))
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 16
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.