Evaluation of Safety and Security Concerns in Auto-pilot Vehicles
VerifiedAdded on 2024/07/01
|8
|1958
|480
Report
AI Summary
This report provides a comprehensive evaluation of the safety and security issues surrounding auto-pilot systems in automobiles. It begins with an introduction to the framework of auto-pilot technology, highlighting both the benefits and potential problems. The evaluation covers the history of safety in automated vehicles, a technological assessment, and a breakdown of the different levels of automation. Security concerns such as hacking, technical issues, and signal interruptions are discussed, alongside the benefits of automation, including improved safety, economic advantages, and increased efficiency. The report also touches on future works and limitations of the technology, referencing various academic sources to support its analysis. The conclusion emphasizes the need for ongoing improvements and vigilance in addressing the risks associated with auto-pilot systems to ensure the safety and security of both drivers and pedestrians.
Review
Evaluation of safety and security issues
regarding Auto-pilot in automobiles
1
Evaluation of safety and security issues
regarding Auto-pilot in automobiles
1
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Table of contents
1. Introduction to Auto-pilot in automobiles
1.1 Auto-pilot in automobiles Framework
1.1.1 Safety and security benefits and issues for auto-pilot in automobiles
2. Evaluation
2.1 History of safety within automated vehicle
2.2 Technology Evaluation
2.3 Levels of Automation
2.3.1 Level 0
2.3.1 Level 1
2.3.3 Level 2
2.3.4 Level 3
2.3.5 Level 4
2.3.6 Level 5
3. Security Concerns
3.1 Hacking
3.2 Technical Issues
3.3 Signal Interruptions
4. Benefits
5. Future Works
6. Limitation
7. References
8. Appendix
2
1. Introduction to Auto-pilot in automobiles
1.1 Auto-pilot in automobiles Framework
1.1.1 Safety and security benefits and issues for auto-pilot in automobiles
2. Evaluation
2.1 History of safety within automated vehicle
2.2 Technology Evaluation
2.3 Levels of Automation
2.3.1 Level 0
2.3.1 Level 1
2.3.3 Level 2
2.3.4 Level 3
2.3.5 Level 4
2.3.6 Level 5
3. Security Concerns
3.1 Hacking
3.2 Technical Issues
3.3 Signal Interruptions
4. Benefits
5. Future Works
6. Limitation
7. References
8. Appendix
2
1. Introduction to Auto-pilot in automobiles
Issues in the vehicle are one of the stimulating problems in controlling vehicle control
particularly in the curvature with the low coefficient friction. One of the challenges on icy
roads is due to the establishment of stable vehicle motion in addition to the desired path
tacking presentation along with the curvature (Ahiska, et. al., 2018). During the slippage of
the wheel, the transmission control among the torque is used to the wheel and the adhesion
force developed is condensed. This is because the resultant handling performance and effects
of steering commands become more difficult in inspecting while skidding. The auto-pilot in
automobiles are evolving rapidly as this is due to handling problem related to low friction and
complication in electric vehicles. For this, they are introducing the restrictive consumption
dynamics electric motor torque.
1.1 Auto-pilot in automobiles framework
The rapid integration of information from various information sources as IoT sensors is
important because it responds to the emergencies and disasters. The number of IoT sensors
sources rapidly grow with the evolvement of mobile devices and also with the rate of IoT
sensors. Cameras and environment sensors on IoT devices are implemented on the vehicle or
carried or worn by the user (Nourinejad, et. al., 2018). The information value of this
information totally depends on the ability of incident responders application for detecting its
existence, location and to assimilate the data and information collected from the source.
The internet of things is playing a tremendous role in changing the automobile industry with
no signs of slowing down. In the coming years, it has been expecting that the IoT will change
the each and every operation of the business industry. The automobile industry has been
declared as the most vital market in the IoT as it provides many benefits for improving
security concerns and developing the concept of owning a car. Self-driving technology
develops at a rapid pace for making a fully-autonomous car (McCall, et. al., 2018). The
general working principles of connection of cars and the IoT are listed below:
The autonomous cars are approximately having the same components:
Video cameras- It detects the traffic signals and lights of cars which are closer and also read
road signs through 360 degrees of visibility around the vehicle.
Radars- The radars in the vehicle detect the nearby objects and velocity at long distance.
This helps in making a decision as per the situation (Arakawa, et. al., 2018). Through this, the
3
Issues in the vehicle are one of the stimulating problems in controlling vehicle control
particularly in the curvature with the low coefficient friction. One of the challenges on icy
roads is due to the establishment of stable vehicle motion in addition to the desired path
tacking presentation along with the curvature (Ahiska, et. al., 2018). During the slippage of
the wheel, the transmission control among the torque is used to the wheel and the adhesion
force developed is condensed. This is because the resultant handling performance and effects
of steering commands become more difficult in inspecting while skidding. The auto-pilot in
automobiles are evolving rapidly as this is due to handling problem related to low friction and
complication in electric vehicles. For this, they are introducing the restrictive consumption
dynamics electric motor torque.
1.1 Auto-pilot in automobiles framework
The rapid integration of information from various information sources as IoT sensors is
important because it responds to the emergencies and disasters. The number of IoT sensors
sources rapidly grow with the evolvement of mobile devices and also with the rate of IoT
sensors. Cameras and environment sensors on IoT devices are implemented on the vehicle or
carried or worn by the user (Nourinejad, et. al., 2018). The information value of this
information totally depends on the ability of incident responders application for detecting its
existence, location and to assimilate the data and information collected from the source.
The internet of things is playing a tremendous role in changing the automobile industry with
no signs of slowing down. In the coming years, it has been expecting that the IoT will change
the each and every operation of the business industry. The automobile industry has been
declared as the most vital market in the IoT as it provides many benefits for improving
security concerns and developing the concept of owning a car. Self-driving technology
develops at a rapid pace for making a fully-autonomous car (McCall, et. al., 2018). The
general working principles of connection of cars and the IoT are listed below:
The autonomous cars are approximately having the same components:
Video cameras- It detects the traffic signals and lights of cars which are closer and also read
road signs through 360 degrees of visibility around the vehicle.
Radars- The radars in the vehicle detect the nearby objects and velocity at long distance.
This helps in making a decision as per the situation (Arakawa, et. al., 2018). Through this, the
3
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
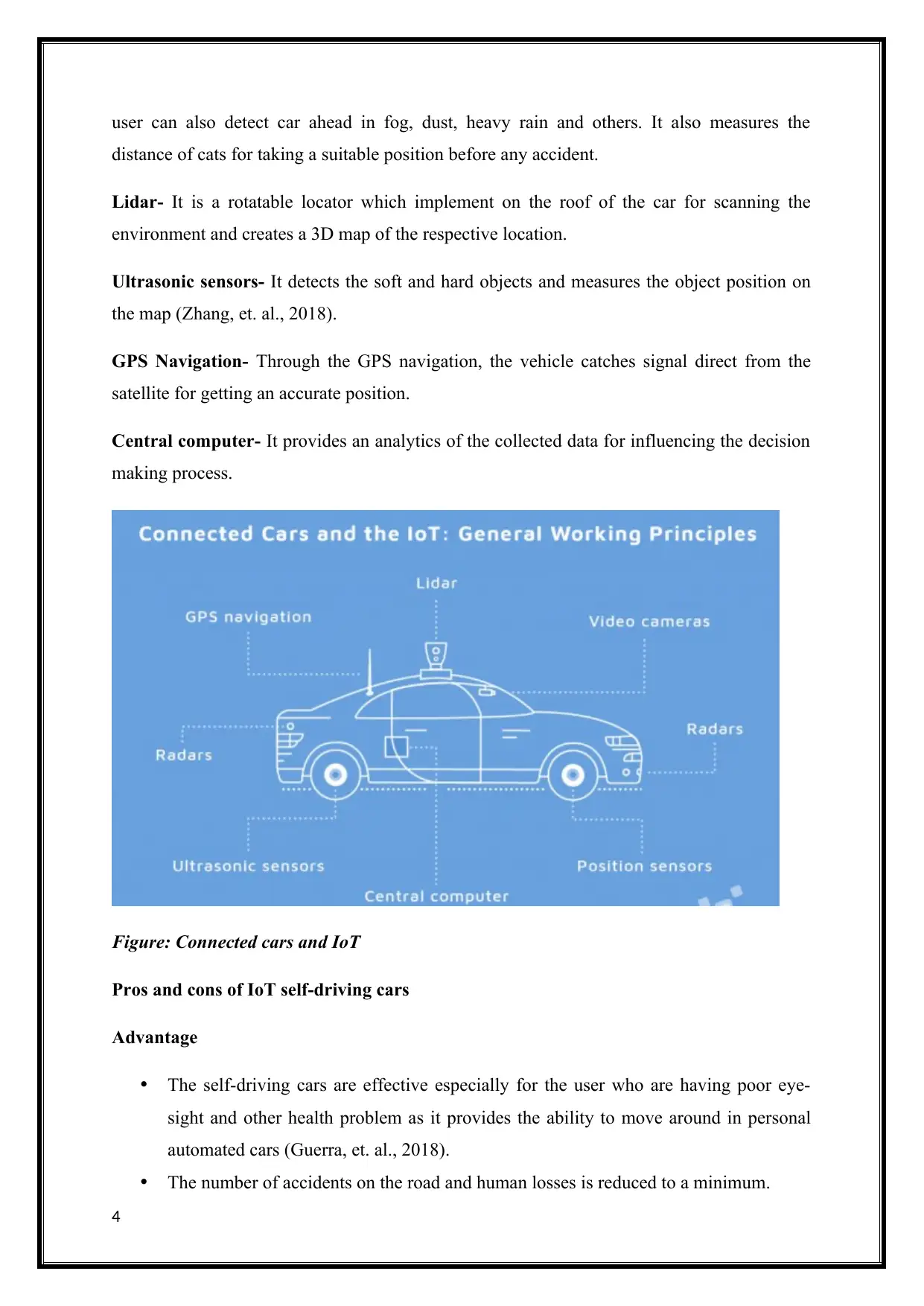
user can also detect car ahead in fog, dust, heavy rain and others. It also measures the
distance of cats for taking a suitable position before any accident.
Lidar- It is a rotatable locator which implement on the roof of the car for scanning the
environment and creates a 3D map of the respective location.
Ultrasonic sensors- It detects the soft and hard objects and measures the object position on
the map (Zhang, et. al., 2018).
GPS Navigation- Through the GPS navigation, the vehicle catches signal direct from the
satellite for getting an accurate position.
Central computer- It provides an analytics of the collected data for influencing the decision
making process.
Figure: Connected cars and IoT
Pros and cons of IoT self-driving cars
Advantage
The self-driving cars are effective especially for the user who are having poor eye-
sight and other health problem as it provides the ability to move around in personal
automated cars (Guerra, et. al., 2018).
The number of accidents on the road and human losses is reduced to a minimum.
4
distance of cats for taking a suitable position before any accident.
Lidar- It is a rotatable locator which implement on the roof of the car for scanning the
environment and creates a 3D map of the respective location.
Ultrasonic sensors- It detects the soft and hard objects and measures the object position on
the map (Zhang, et. al., 2018).
GPS Navigation- Through the GPS navigation, the vehicle catches signal direct from the
satellite for getting an accurate position.
Central computer- It provides an analytics of the collected data for influencing the decision
making process.
Figure: Connected cars and IoT
Pros and cons of IoT self-driving cars
Advantage
The self-driving cars are effective especially for the user who are having poor eye-
sight and other health problem as it provides the ability to move around in personal
automated cars (Guerra, et. al., 2018).
The number of accidents on the road and human losses is reduced to a minimum.
4
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
The electric cars use less fuel and effort which assist in saving the delivery cost.
The delivery of products and goods to the distraught areas will be done through the
automated cars. The human drivers can use auto-pilot as a medium for transferring
goods (Ye and Yamamoto, 2018).
Challenges
100% reliable on the software can arise the technical mistakes. Also, the third party
application can hack the user data for tracking their location.
The ethical issue related to the auto-pilot is that sometimes the automated car is not
able to rational the people walking on the road. It can affect the life of pedestrian
people.
The autopilot cannot be protected from the external interference (Gružauskas, et. al.,
2018).
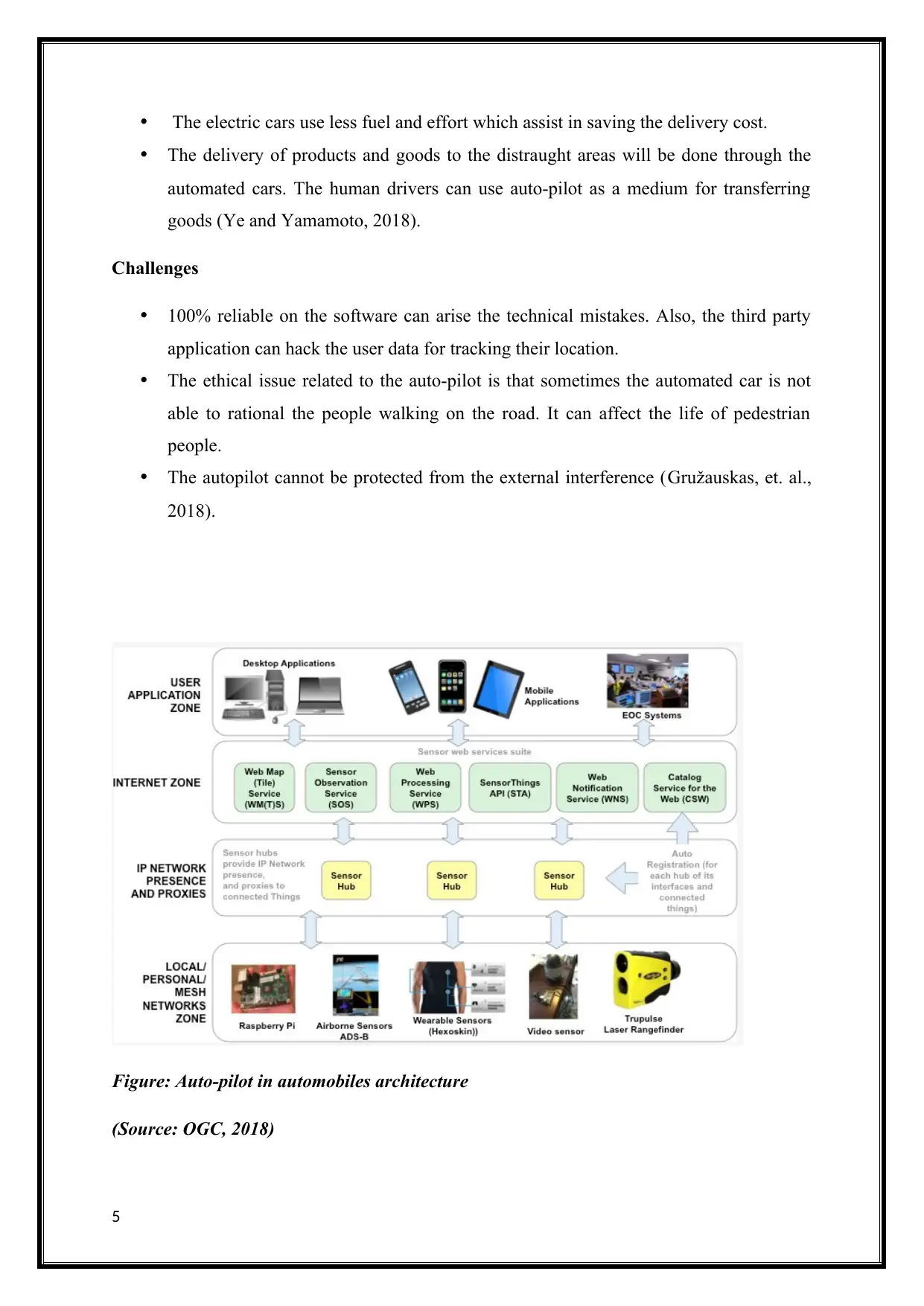
Figure: Auto-pilot in automobiles architecture
(Source: OGC, 2018)
5
The delivery of products and goods to the distraught areas will be done through the
automated cars. The human drivers can use auto-pilot as a medium for transferring
goods (Ye and Yamamoto, 2018).
Challenges
100% reliable on the software can arise the technical mistakes. Also, the third party
application can hack the user data for tracking their location.
The ethical issue related to the auto-pilot is that sometimes the automated car is not
able to rational the people walking on the road. It can affect the life of pedestrian
people.
The autopilot cannot be protected from the external interference (Gružauskas, et. al.,
2018).
Figure: Auto-pilot in automobiles architecture
(Source: OGC, 2018)
5
1.1.1 Safety and security benefits and issues for auto-pilot in automobiles
Benefits of automation
Safety
In automated vehicles, the safety benefits are paramount. It also helps in reducing the human
error from the crash equation which assists in protecting the users and other pedestrians (Xu
and Fan, 2018). It has been analyzed that the 94% of the serious crashes are done due to the
human error. The decrease in the number of accidents could reduce congestion caused by the
traffic incidents.
Economic and societal benefits
The automated vehicles also offer additional social and economic benefits. As per the
NHTSA study, $242 billion has been wasted in 2010 due to a vehicle crash and $594 billion
due to the loss of life due to injuries. The automated vehicle will assist in eliminating the
motor vehicle crash (Ji, et. al., 2018).
Efficiency and convenience
The automated vehicles also support the smooth traffic flow and reduce the traffic
congestion. The customer can directly reach from one place to another through automation.
The automated vehicles also free up the driving time with approx. minutes (Mullins, et. al.,
2018).
The self-driving cars are rising day by day in the world and make everything worst. It is clear
that the perfect driving and also the relentless focus will assist in decreasing the traffic losses
by 90%. However, the auto-pilot in an automobile is doing their best to get rid of drivers. In
the current time period, it is been analyzed that the trusting a computer for performing
adequately is the main issue which can malfunction and put drivers at risk (Hulse, et. al.,
2018). The autonomous vehicle rides through GPS are not always successful as sometimes it
locates the places which are away from the destination. Also, the software stores the personal
information of the user which can easily draw the attention of hackers (Chater, et. al., 2018).
The sensor failing is also a major concern because the autonomous vehicles totally rely on the
sensors for the location the destination, weather condition, traffic laws and many more. This
can also cause personal injury to the user (Woldeamanuel and Nguyen, 2018).
6
Benefits of automation
Safety
In automated vehicles, the safety benefits are paramount. It also helps in reducing the human
error from the crash equation which assists in protecting the users and other pedestrians (Xu
and Fan, 2018). It has been analyzed that the 94% of the serious crashes are done due to the
human error. The decrease in the number of accidents could reduce congestion caused by the
traffic incidents.
Economic and societal benefits
The automated vehicles also offer additional social and economic benefits. As per the
NHTSA study, $242 billion has been wasted in 2010 due to a vehicle crash and $594 billion
due to the loss of life due to injuries. The automated vehicle will assist in eliminating the
motor vehicle crash (Ji, et. al., 2018).
Efficiency and convenience
The automated vehicles also support the smooth traffic flow and reduce the traffic
congestion. The customer can directly reach from one place to another through automation.
The automated vehicles also free up the driving time with approx. minutes (Mullins, et. al.,
2018).
The self-driving cars are rising day by day in the world and make everything worst. It is clear
that the perfect driving and also the relentless focus will assist in decreasing the traffic losses
by 90%. However, the auto-pilot in an automobile is doing their best to get rid of drivers. In
the current time period, it is been analyzed that the trusting a computer for performing
adequately is the main issue which can malfunction and put drivers at risk (Hulse, et. al.,
2018). The autonomous vehicle rides through GPS are not always successful as sometimes it
locates the places which are away from the destination. Also, the software stores the personal
information of the user which can easily draw the attention of hackers (Chater, et. al., 2018).
The sensor failing is also a major concern because the autonomous vehicles totally rely on the
sensors for the location the destination, weather condition, traffic laws and many more. This
can also cause personal injury to the user (Woldeamanuel and Nguyen, 2018).
6
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
References
Ahiska, K., Ozgoren, M. K., & Leblebicioglu, M. K. (2018). Autopilot Design for
Vehicle Cornering Through Icy Roads. IEEE Transactions on Vehicular
Technology, 67(3), 1867-1880.
Arakawa, T., Hibi, R., & Fujishiro, T. A. (2018). Psychophysical assessment of a
driver’s mental state in autonomous vehicles. Transportation Research Part A: Policy
and Practice.
Chater, N., Misyak, J., Watson, D., Griffiths, N., & Mouzakitis, A. (2018).
Negotiating the traffic: can cognitive science help make autonomous vehicles a
reality?. Trends in cognitive sciences, 22(2), 93-95.
Gružauskas, V., Baskutis, S., & Navickas, V. (2018). Minimizing the trade-off
between sustainability and cost effective performance by using autonomous
vehicles. Journal of Cleaner Production, 184, 709-717.
Guerra, A. G., Ferreira, A. S., Costa, M., Nodar-López, D., & Agelet, F. A. (2018).
Integrating small satellite communication in an autonomous vehicle network: A case
for oceanography. Acta Astronautica, 145, 229-237.
Hulse, L. M., Xie, H., & Galea, E. R. (2018). Perceptions of autonomous vehicles:
Relationships with road users, risk, gender and age. Safety Science, 102, 1-13.
Ji, X., He, X., Lv, C., Liu, Y., & Wu, J. (2018). Adaptive-neural-network-based
robust lateral motion control for autonomous vehicle at driving limits. Control
Engineering Practice, 76, 41-53.
McCall, R., McGee, F., Mirnig, A., Meschtscherjakov, A., Louveton, N., Engel, T., &
Tscheligi, M. (2018). A taxonomy of autonomous vehicle handover
situations. Transportation Research Part A: Policy and Practice.
Mullins, G. E., Stankiewicz, P. G., Hawthorne, R. C., & Gupta, S. K. (2018).
Adaptive generation of challenging scenarios for testing and evaluation of
autonomous vehicles. Journal of Systems and Software, 137, 197-215.
Nourinejad, M., Bahrami, S., & Roorda, M. J. (2018). Designing parking facilities for
autonomous vehicles. Transportation Research Part B: Methodological, 109, 110-
127.
OGC. (2018). About us [Online] IMIS IoT Pilot. Available at:
http://www.opengeospatial.org/projects/initiatives/imisiot [Accessed: 28 Jul. 18].
7
Ahiska, K., Ozgoren, M. K., & Leblebicioglu, M. K. (2018). Autopilot Design for
Vehicle Cornering Through Icy Roads. IEEE Transactions on Vehicular
Technology, 67(3), 1867-1880.
Arakawa, T., Hibi, R., & Fujishiro, T. A. (2018). Psychophysical assessment of a
driver’s mental state in autonomous vehicles. Transportation Research Part A: Policy
and Practice.
Chater, N., Misyak, J., Watson, D., Griffiths, N., & Mouzakitis, A. (2018).
Negotiating the traffic: can cognitive science help make autonomous vehicles a
reality?. Trends in cognitive sciences, 22(2), 93-95.
Gružauskas, V., Baskutis, S., & Navickas, V. (2018). Minimizing the trade-off
between sustainability and cost effective performance by using autonomous
vehicles. Journal of Cleaner Production, 184, 709-717.
Guerra, A. G., Ferreira, A. S., Costa, M., Nodar-López, D., & Agelet, F. A. (2018).
Integrating small satellite communication in an autonomous vehicle network: A case
for oceanography. Acta Astronautica, 145, 229-237.
Hulse, L. M., Xie, H., & Galea, E. R. (2018). Perceptions of autonomous vehicles:
Relationships with road users, risk, gender and age. Safety Science, 102, 1-13.
Ji, X., He, X., Lv, C., Liu, Y., & Wu, J. (2018). Adaptive-neural-network-based
robust lateral motion control for autonomous vehicle at driving limits. Control
Engineering Practice, 76, 41-53.
McCall, R., McGee, F., Mirnig, A., Meschtscherjakov, A., Louveton, N., Engel, T., &
Tscheligi, M. (2018). A taxonomy of autonomous vehicle handover
situations. Transportation Research Part A: Policy and Practice.
Mullins, G. E., Stankiewicz, P. G., Hawthorne, R. C., & Gupta, S. K. (2018).
Adaptive generation of challenging scenarios for testing and evaluation of
autonomous vehicles. Journal of Systems and Software, 137, 197-215.
Nourinejad, M., Bahrami, S., & Roorda, M. J. (2018). Designing parking facilities for
autonomous vehicles. Transportation Research Part B: Methodological, 109, 110-
127.
OGC. (2018). About us [Online] IMIS IoT Pilot. Available at:
http://www.opengeospatial.org/projects/initiatives/imisiot [Accessed: 28 Jul. 18].
7
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Woldeamanuel, M., & Nguyen, D. (2018). Perceived benefits and concerns of
autonomous vehicles: An exploratory study of millennials’ sentiments of an emerging
market. Research in Transportation Economics.
Xu, X., & Fan, C. K. (2018). Autonomous vehicles, risk perceptions and insurance
demand: An individual survey in China. Transportation Research Part A: Policy and
Practice.
Ye, L., & Yamamoto, T. (2018). Modeling connected and autonomous vehicles in
heterogeneous traffic flow. Physica A: Statistical Mechanics and its
Applications, 490, 269-277.
Zhang, F., Gonzales, J., Li, S. E., Borrelli, F., & Li, K. (2018). Drift control for
cornering maneuver of autonomous vehicles. Mechatronics.
8
autonomous vehicles: An exploratory study of millennials’ sentiments of an emerging
market. Research in Transportation Economics.
Xu, X., & Fan, C. K. (2018). Autonomous vehicles, risk perceptions and insurance
demand: An individual survey in China. Transportation Research Part A: Policy and
Practice.
Ye, L., & Yamamoto, T. (2018). Modeling connected and autonomous vehicles in
heterogeneous traffic flow. Physica A: Statistical Mechanics and its
Applications, 490, 269-277.
Zhang, F., Gonzales, J., Li, S. E., Borrelli, F., & Li, K. (2018). Drift control for
cornering maneuver of autonomous vehicles. Mechatronics.
8
1 out of 8

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.