Autonomous Agricultural Robot Design: Navigating Between Crop Rows
VerifiedAdded on 2022/11/14
|12
|2928
|332
Project
AI Summary
This project details the design of an autonomous agricultural robot intended for navigating between crop rows. The design incorporates an electric motor, Omni wheels, and prime wheels, with a control unit for autonomous movement. The robot's chassis is constructed from lightweight fiberglass and houses the electronic unit and sensors. The robot utilizes DC motors for wheel drive, employing differential driving techniques and Omni wheels for maneuverability. The robot's autonomous navigation relies on algorithms for straight movement and row-end turns, using sensors to detect plant lines and row ends. Advantages include reduced labor costs and improved efficiency. The project also discusses the risks and advantages of agricultural robots, including their application in various farming tasks and their potential to reduce environmental impact. The robot is designed to perform agricultural operations such as irrigation and pest control. The robot is able to sense objects within a certain distance and then it gives an on and off signal.

1
HUMAN-COMPUTER INTERACTION
By Name
Course
Instructor
Institution
Location
Date
HUMAN-COMPUTER INTERACTION
By Name
Course
Instructor
Institution
Location
Date
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
2
A DESIGN OF AN AUTONOMOUS AGRICULTURAL ROBOT TO NAVIGATE
BETWEEN ROWS
Introduction
The agriculture sector is a labour intensive sector, which for a long time has been greatly
depending on Human labour. Nevertheless, in the countries where there is no sufficient labour ,
the cost of employing workers to work in farms is very high and essential the agricultural
yield in this countries is very high, and due to that, there is a tendency towards the automated
agriculture [1]. The process of automation and use of robots is not only required during the
plant glowing process but the robots are required in transportation and storage of the
agricultural products. All the technological automation application is made up of robots. In
agriculture, the detection of plants, crop and animals, maintenance of the fields and the
harvesting of the crops are among the activities where the robots can be applied [2].
The application of robots in the Agricultural sector has a wide range of uses. The value of
making application of the robots in agriculture is offering a very important value to the farmers.
In agriculture, the robots are used in Seeding, irrigation, pest control, milking, crop
categorization, processing and controlling plant damage. The robots which are applied to carry
out this activity in the agricultural farms have sensors which can be able to gather data from the
surroundings, analyses the data and then take the most appropriate actions based on the data. In
the agricultural robot's sensors which are contained in these robots plays a very important role.
The sensors range in complexity from the very basic to very complex and sophisticated sensors.
Research background
A DESIGN OF AN AUTONOMOUS AGRICULTURAL ROBOT TO NAVIGATE
BETWEEN ROWS
Introduction
The agriculture sector is a labour intensive sector, which for a long time has been greatly
depending on Human labour. Nevertheless, in the countries where there is no sufficient labour ,
the cost of employing workers to work in farms is very high and essential the agricultural
yield in this countries is very high, and due to that, there is a tendency towards the automated
agriculture [1]. The process of automation and use of robots is not only required during the
plant glowing process but the robots are required in transportation and storage of the
agricultural products. All the technological automation application is made up of robots. In
agriculture, the detection of plants, crop and animals, maintenance of the fields and the
harvesting of the crops are among the activities where the robots can be applied [2].
The application of robots in the Agricultural sector has a wide range of uses. The value of
making application of the robots in agriculture is offering a very important value to the farmers.
In agriculture, the robots are used in Seeding, irrigation, pest control, milking, crop
categorization, processing and controlling plant damage. The robots which are applied to carry
out this activity in the agricultural farms have sensors which can be able to gather data from the
surroundings, analyses the data and then take the most appropriate actions based on the data. In
the agricultural robot's sensors which are contained in these robots plays a very important role.
The sensors range in complexity from the very basic to very complex and sophisticated sensors.
Research background
3
In the modern world, farmers are expected to generate more yield s with higher quality at a
lower expense in the sustainable way that is less dependent on the labour force. The
implementation of the digital framing and site-specific precision management are some of
the likely responses to this expectation, which greatly relies not only on the technology of
the sensors but also the continues collection of the field data which is only feasible through
efficient utilization of the agricultural robots. The farmers, growers and agricultural scientist
are facing the challenge of producing enough food from the limited parcels of land which
are available to meet the demands of the approximated 9.8 billion global population by 2050.
This is equal to feeding a newly added city of 200,000 people on a daily basis [3].
The integration of the digital sensors, tools and control technologies has greatly acerbated the
design and development of agricultural robots, showing in the factory setting, the interaction
between human beings and the robots are more protected and systematic. Nevertheless, in the
agricultural environments, this is not the case and such systems which offers protection are not
available. In the agricultural field, people are forced to work together with robots. This usually
puts human life at more risks, because the interaction is relatively more. As a result of that, the
security systems must be well developed [4].
Many studies have been carried out regarding the design and construction of the agriculture
robots. The agricultural robots have been conceived to operating in an open field , where robot
guidance is rather complex owing to the lack of fixed references as well as the variability of
the operative environment. Due to that only I very rare cases, the prototype robots have been
achieved in the commercial stages . On the contrary, the pot-plants are more suitable for the
introduction of the robots platform than the open field [5].
Proposed Design
In the modern world, farmers are expected to generate more yield s with higher quality at a
lower expense in the sustainable way that is less dependent on the labour force. The
implementation of the digital framing and site-specific precision management are some of
the likely responses to this expectation, which greatly relies not only on the technology of
the sensors but also the continues collection of the field data which is only feasible through
efficient utilization of the agricultural robots. The farmers, growers and agricultural scientist
are facing the challenge of producing enough food from the limited parcels of land which
are available to meet the demands of the approximated 9.8 billion global population by 2050.
This is equal to feeding a newly added city of 200,000 people on a daily basis [3].
The integration of the digital sensors, tools and control technologies has greatly acerbated the
design and development of agricultural robots, showing in the factory setting, the interaction
between human beings and the robots are more protected and systematic. Nevertheless, in the
agricultural environments, this is not the case and such systems which offers protection are not
available. In the agricultural field, people are forced to work together with robots. This usually
puts human life at more risks, because the interaction is relatively more. As a result of that, the
security systems must be well developed [4].
Many studies have been carried out regarding the design and construction of the agriculture
robots. The agricultural robots have been conceived to operating in an open field , where robot
guidance is rather complex owing to the lack of fixed references as well as the variability of
the operative environment. Due to that only I very rare cases, the prototype robots have been
achieved in the commercial stages . On the contrary, the pot-plants are more suitable for the
introduction of the robots platform than the open field [5].
Proposed Design
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
4
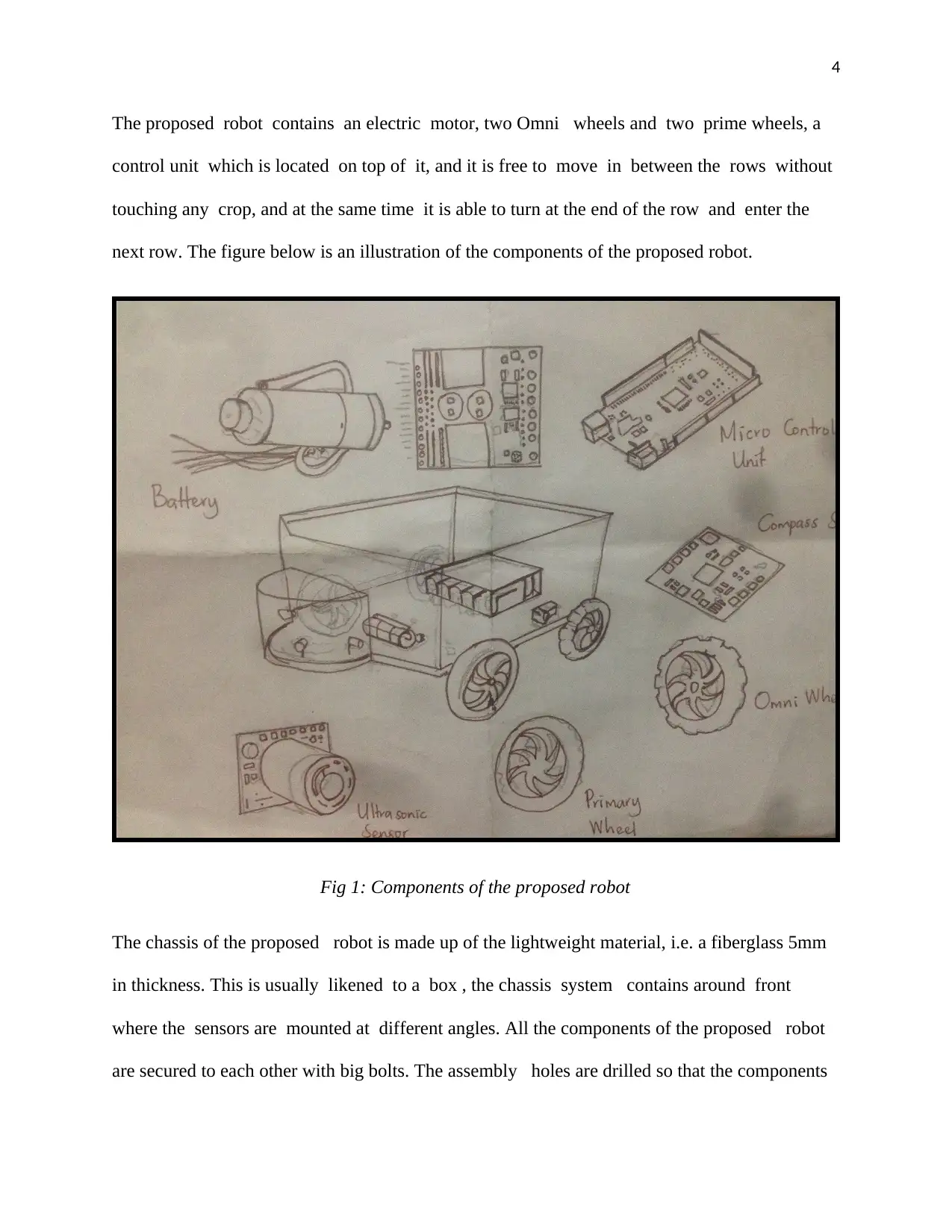
The proposed robot contains an electric motor, two Omni wheels and two prime wheels, a
control unit which is located on top of it, and it is free to move in between the rows without
touching any crop, and at the same time it is able to turn at the end of the row and enter the
next row. The figure below is an illustration of the components of the proposed robot.
Fig 1: Components of the proposed robot
The chassis of the proposed robot is made up of the lightweight material, i.e. a fiberglass 5mm
in thickness. This is usually likened to a box , the chassis system contains around front
where the sensors are mounted at different angles. All the components of the proposed robot
are secured to each other with big bolts. The assembly holes are drilled so that the components
The proposed robot contains an electric motor, two Omni wheels and two prime wheels, a
control unit which is located on top of it, and it is free to move in between the rows without
touching any crop, and at the same time it is able to turn at the end of the row and enter the
next row. The figure below is an illustration of the components of the proposed robot.
Fig 1: Components of the proposed robot
The chassis of the proposed robot is made up of the lightweight material, i.e. a fiberglass 5mm
in thickness. This is usually likened to a box , the chassis system contains around front
where the sensors are mounted at different angles. All the components of the proposed robot
are secured to each other with big bolts. The assembly holes are drilled so that the components
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
5
could be put together. Also, the holes are drilled on top of the chassis for the cables. The
electronic Unit is mounted inside. A covering is made to protect the electronic units from the
external conditions
For the proposed robot to move, two DC motors are used to drive the wheel. The robot has a
DC motor which is located at the frontal wheel to move. Each of the frontal wheels is controlled
separately and at the same time, this makes it possible to drive the robot. The main technical
features of the proposed robot are:
6V operating voltage
450 mA current
130 RPM maximum turn speed
Maximum load capacity 6 A voltage
130 Oz-in torque
The differential driving techniques are used to drive the proposed robot , and this type of
driving requires that the rear wheels of the robot can be able to show increased resistance and
hence could be easily turned. In order to achieve that purpose, the Omni wheels are used with
the multipurpose features. They can be able to turn like a regular wheel and the result of the
custom-made design, the proposed robot can be able to move sideways. When the proposed
robot is driven autonomously, it has to different algorithms which makes it move: The first
algorithm allows the robot to straight while the second one allows the robot to move straight
and be able to turn.
The point that the robot will be able to rotate is referred to as the Instantaneous Centre of
Curvature. By changing the velocity of the two wheels, it will be possible to vary the trajectory
could be put together. Also, the holes are drilled on top of the chassis for the cables. The
electronic Unit is mounted inside. A covering is made to protect the electronic units from the
external conditions
For the proposed robot to move, two DC motors are used to drive the wheel. The robot has a
DC motor which is located at the frontal wheel to move. Each of the frontal wheels is controlled
separately and at the same time, this makes it possible to drive the robot. The main technical
features of the proposed robot are:
6V operating voltage
450 mA current
130 RPM maximum turn speed
Maximum load capacity 6 A voltage
130 Oz-in torque
The differential driving techniques are used to drive the proposed robot , and this type of
driving requires that the rear wheels of the robot can be able to show increased resistance and
hence could be easily turned. In order to achieve that purpose, the Omni wheels are used with
the multipurpose features. They can be able to turn like a regular wheel and the result of the
custom-made design, the proposed robot can be able to move sideways. When the proposed
robot is driven autonomously, it has to different algorithms which makes it move: The first
algorithm allows the robot to straight while the second one allows the robot to move straight
and be able to turn.
The point that the robot will be able to rotate is referred to as the Instantaneous Centre of
Curvature. By changing the velocity of the two wheels, it will be possible to vary the trajectory
6
which the robot takes. This is because the rate of rotation about the Instantaneous Centre of
Curvature must be the same for both wheels.
Straight movement
In a straight move, the robot is expected to censor any of the plants which are sloping and be able
to move forward without hitting such plants. This robot makes application of the sensors to
determine the lines through which it moves. The location of the robot will be determined on the
basis of the reading of the values by the sensors. Under ideal conditions, both the sensors are
expected to determine the same distance from the plant on both sides of the lines, which in
turn ensures that the proposed robot moves right through the line.
Depending on the values which are read by the sensors, they help the robot to determine which
direction the robot should turn to: Either left or right. If the value which will be read on the
sensor is greater the robot will make a right turn. But is the value read by the sensors is less the
robot will make a left turn. Once all the direction towards the robots is determined, then the
intensity of turning will be identified. If the measurement difference between the sensors is
lower than the bottom limit, then the robot will not be able to turn; if it is between the upper
and the bottom limit, then the robot will make a slight turn and if the value is higher than the
upper limit, then the proposed robot will turn substantially.
Row-end turn
A different set of algorithms will be used to find out the end row and to assist in making the
decision turn to the next line. In order for the robot to realize that it has reached the end of the
row, different sensors will be used. When all the sensors that are used to record a value which is
higher than the value and is usually determined that it has reached the end of the row, the robot
which the robot takes. This is because the rate of rotation about the Instantaneous Centre of
Curvature must be the same for both wheels.
Straight movement
In a straight move, the robot is expected to censor any of the plants which are sloping and be able
to move forward without hitting such plants. This robot makes application of the sensors to
determine the lines through which it moves. The location of the robot will be determined on the
basis of the reading of the values by the sensors. Under ideal conditions, both the sensors are
expected to determine the same distance from the plant on both sides of the lines, which in
turn ensures that the proposed robot moves right through the line.
Depending on the values which are read by the sensors, they help the robot to determine which
direction the robot should turn to: Either left or right. If the value which will be read on the
sensor is greater the robot will make a right turn. But is the value read by the sensors is less the
robot will make a left turn. Once all the direction towards the robots is determined, then the
intensity of turning will be identified. If the measurement difference between the sensors is
lower than the bottom limit, then the robot will not be able to turn; if it is between the upper
and the bottom limit, then the robot will make a slight turn and if the value is higher than the
upper limit, then the proposed robot will turn substantially.
Row-end turn
A different set of algorithms will be used to find out the end row and to assist in making the
decision turn to the next line. In order for the robot to realize that it has reached the end of the
row, different sensors will be used. When all the sensors that are used to record a value which is
higher than the value and is usually determined that it has reached the end of the row, the robot
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
7
then starts to turn. In order for the robot to turn the wheels are locked towards the direction, it
needs to turn. It takes n four steps to complete this turn. It first makes a 90-degree turn, then until
all the sensors related to turn to detect the row , then it makes another 90-degree turn and then
keeps moving till all the sensors detect the line distance [6].
The proposed robot has a compass sensor which is able to complete the 90-degree turn, All the
distance between the lines is usually determined by the encoder which is mounted on the
engine. The main purpose of this robot is to move between the crop lines automatically. The
proposed robot has to navigate through the long curved rows of the crop. On the headland, the
robot has to turn and return in the adjacent row.
In the actual conditions, all the crops are not fully balanced and the obstacles may be present in
the field. Additionally the shape of the land where the opposite sides are not parallels
considered as standard, The robot has to take into account all these variables by planning route.
Further obstacles such as electricity pylon can be moved in the rows and they will be able to
block the path through the robot is supposed to be moving through. With that, the robot has to
make backward moves and continue with the next row at these situations. The proposed robot
has a special mechanism, which is able to receive signals to use during such as agricultural
operations such as irrigation, spraying postcodes, spraying fertilizers, etc. The robot has the
ability to sense objects within a certain distance and then it gives an on and off signal [7]. For
example, when the robot detects plants, it could start a pulverization system.
Advantages and risks of the robot
The agricultural robots refer to the robots which are deployed the agricultural purposes, majority
of the robots applied in the agricultural sector currently are applied in the harvesting stage, also
then starts to turn. In order for the robot to turn the wheels are locked towards the direction, it
needs to turn. It takes n four steps to complete this turn. It first makes a 90-degree turn, then until
all the sensors related to turn to detect the row , then it makes another 90-degree turn and then
keeps moving till all the sensors detect the line distance [6].
The proposed robot has a compass sensor which is able to complete the 90-degree turn, All the
distance between the lines is usually determined by the encoder which is mounted on the
engine. The main purpose of this robot is to move between the crop lines automatically. The
proposed robot has to navigate through the long curved rows of the crop. On the headland, the
robot has to turn and return in the adjacent row.
In the actual conditions, all the crops are not fully balanced and the obstacles may be present in
the field. Additionally the shape of the land where the opposite sides are not parallels
considered as standard, The robot has to take into account all these variables by planning route.
Further obstacles such as electricity pylon can be moved in the rows and they will be able to
block the path through the robot is supposed to be moving through. With that, the robot has to
make backward moves and continue with the next row at these situations. The proposed robot
has a special mechanism, which is able to receive signals to use during such as agricultural
operations such as irrigation, spraying postcodes, spraying fertilizers, etc. The robot has the
ability to sense objects within a certain distance and then it gives an on and off signal [7]. For
example, when the robot detects plants, it could start a pulverization system.
Advantages and risks of the robot
The agricultural robots refer to the robots which are deployed the agricultural purposes, majority
of the robots applied in the agricultural sector currently are applied in the harvesting stage, also
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
8
there are a variety of robots which have been developed for the weed control. The application of
automation in the agriculture greatly helps in creating the numerous the industry while helping
the farmers to save the money and time, some of the scientist the flying robots, mobile robots,
and the forester robots which are currently utilized in agriculture.
Advantages
There are many advantages associated with the application of robots in agriculture and they
include;
The robots do not get tired or sick and they do not require time off, the robots have the ability to
operate with, robots cause very few errors at high speed, and at the same time the higher quality
can be sensed by the machines accurately [8].
As the machines are made cheaper and lighter, the driver seat and the cab can be aluminate, the
robots they will be able to be used in numerous fields in the agricultural sector. The robots I'll be
able to work easily around the trees, the ponds, the rocks, and other obstacles.
The agricultural robots have the ability to reduce up to 80% of the farm's use of pesticides, the
robots are able to perform many tasks at the same time. The development of the robots has
created jobs for those who are involved in their manufacturing, repair, and maintenance.
The proposed robot can be able to perform different agriculture operations like spraying, fruit
picking, weeding hence allowing the farmers to reduce the environmental impact while
efficiency and precision and managing of the individual plants in a novel way.
there are a variety of robots which have been developed for the weed control. The application of
automation in the agriculture greatly helps in creating the numerous the industry while helping
the farmers to save the money and time, some of the scientist the flying robots, mobile robots,
and the forester robots which are currently utilized in agriculture.
Advantages
There are many advantages associated with the application of robots in agriculture and they
include;
The robots do not get tired or sick and they do not require time off, the robots have the ability to
operate with, robots cause very few errors at high speed, and at the same time the higher quality
can be sensed by the machines accurately [8].
As the machines are made cheaper and lighter, the driver seat and the cab can be aluminate, the
robots they will be able to be used in numerous fields in the agricultural sector. The robots I'll be
able to work easily around the trees, the ponds, the rocks, and other obstacles.
The agricultural robots have the ability to reduce up to 80% of the farm's use of pesticides, the
robots are able to perform many tasks at the same time. The development of the robots has
created jobs for those who are involved in their manufacturing, repair, and maintenance.
The proposed robot can be able to perform different agriculture operations like spraying, fruit
picking, weeding hence allowing the farmers to reduce the environmental impact while
efficiency and precision and managing of the individual plants in a novel way.
9
The application of the proposed robot can be able to protect the human workers from the harmful
effects of the chemical handling by hand and through the systems of spraying and they can be
able to reduce up to 80% of farm use of pesticides [9].
The proposed robot can be used for other agricultural activities such as pruning, spraying,
weeding, and monitoring, also the robot can be used in the livestock application.
The robot will be able to offer a higher quality of fresh produce, reduced need for manual labor
and reduced production rates. In that, the robot can be used to automate manual tasks such as
weeding and spraying [10]
Risks
Even the proposed robot has many risks which are associated with it and they include;
o The development of the robot can be very expensive to develop.
o The development of the robots will replace many agricultural workers hence rendering
them unemployment [11].
Conclusion
In conclusion, In the modern world farmers are expected to generate more yield s with higher
quality at a lower expense in the sustainable way that is less the labor force. The agricultural
robots refer to the robots which are deployed the agricultural purposes, majority of the robots
applied in the agricultural sector currently are applied in the harvesting stage, also there are a
variety of robots which have been developed for the weed control [12].
The application of the proposed robot can be able to protect the human workers from the harmful
effects of the chemical handling by hand and through the systems of spraying and they can be
able to reduce up to 80% of farm use of pesticides [9].
The proposed robot can be used for other agricultural activities such as pruning, spraying,
weeding, and monitoring, also the robot can be used in the livestock application.
The robot will be able to offer a higher quality of fresh produce, reduced need for manual labor
and reduced production rates. In that, the robot can be used to automate manual tasks such as
weeding and spraying [10]
Risks
Even the proposed robot has many risks which are associated with it and they include;
o The development of the robot can be very expensive to develop.
o The development of the robots will replace many agricultural workers hence rendering
them unemployment [11].
Conclusion
In conclusion, In the modern world farmers are expected to generate more yield s with higher
quality at a lower expense in the sustainable way that is less the labor force. The agricultural
robots refer to the robots which are deployed the agricultural purposes, majority of the robots
applied in the agricultural sector currently are applied in the harvesting stage, also there are a
variety of robots which have been developed for the weed control [12].
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
10
The findings of this study indicate that agricultural robots are more flexible as compared to the
conventional systems and they play a very crucial role in reducing the cost of labor and the
restriction of the number of daily working hours greatly. Moreover, it is much possible to
substitute the working routine with the autonomous system although some of the routines are
nearly impossible to automate because of the high level of precision which is required of the
specific tasks. Also at the stage of development, the initial investment and the annual cost for the
expenses are relatively high but they seem possible viable robots for agricultural purposes such
as crop scouting, grass cutting, and the autonomous weeding. The findings of this study clearly
indicate that there is an essential potential for applying the agricultural robots is there are
adequate safety and control regulations at a reasonable cost. Furthermore, the comparison
between different regions shows that labor costs, farm structures, and crop rotation have a
tremendous impact on the potential use of robots in the agricultural sector.
The implementation of the digital framing and site-specific precision management are some of
the responses to this expectation, which greatly relies not only on the technology of the sensors
but also a collection of the field data which is only feasible through efficient utilization of the
agricultural robots. The proposed robot contains an electric motor, two Omni wheels and
two prime wheels, a control unit which is located on top of it, and it is free to move in
between the rows without touching any crop, and at the same time it is able to turn at the end
of the row and enter the next row.
The findings of this study indicate that agricultural robots are more flexible as compared to the
conventional systems and they play a very crucial role in reducing the cost of labor and the
restriction of the number of daily working hours greatly. Moreover, it is much possible to
substitute the working routine with the autonomous system although some of the routines are
nearly impossible to automate because of the high level of precision which is required of the
specific tasks. Also at the stage of development, the initial investment and the annual cost for the
expenses are relatively high but they seem possible viable robots for agricultural purposes such
as crop scouting, grass cutting, and the autonomous weeding. The findings of this study clearly
indicate that there is an essential potential for applying the agricultural robots is there are
adequate safety and control regulations at a reasonable cost. Furthermore, the comparison
between different regions shows that labor costs, farm structures, and crop rotation have a
tremendous impact on the potential use of robots in the agricultural sector.
The implementation of the digital framing and site-specific precision management are some of
the responses to this expectation, which greatly relies not only on the technology of the sensors
but also a collection of the field data which is only feasible through efficient utilization of the
agricultural robots. The proposed robot contains an electric motor, two Omni wheels and
two prime wheels, a control unit which is located on top of it, and it is free to move in
between the rows without touching any crop, and at the same time it is able to turn at the end
of the row and enter the next row.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
11
References
[1] L. Mejias, Field and Service Robotics, London: Springer, 2014.
[2] J. Holland, Designing Autonomous Mobile Robots, Chicago: Elsevier, 2016.
[3] Robert Engelmore, Blackboard systems, London: Addison-Wesley, 2017.
[4] C. Marco, Service Robots and Robotics: Design and Application: Design and Application,
Chicago: IGI Global, 2018.
[5] L. Joseph, Learning Robotics Using Python, Chicago: Packt Publishing Ltd, 2018.
[6] O. Gusikhin, Informatics in Control, Automation and Robotics, London: Springer, 2016.
[7] R. Arkin, Governing Lethal Behavior in Autonomous Robots, Paris: CRC Press, 2012.
[8] S. Cameron, Towards Autonomous Robotic Systems: Chicago: Springer, 2011.
[9] J. V. Stafford, Precision Agriculture, Berlin: Wageningen Academic Pub, London.
[10] T. M. Osman, Advances In Cooperative Robotics, London: World Scientific, 2017.
[11] M. Monta, Agricultural Robots: Mechanisms and Practice, Texas: Kyoto University Press,
2011.
[12] S. Mitra, Intelligent Systems Technologies and Applications, Kiev: Springer, 2016.
References
[1] L. Mejias, Field and Service Robotics, London: Springer, 2014.
[2] J. Holland, Designing Autonomous Mobile Robots, Chicago: Elsevier, 2016.
[3] Robert Engelmore, Blackboard systems, London: Addison-Wesley, 2017.
[4] C. Marco, Service Robots and Robotics: Design and Application: Design and Application,
Chicago: IGI Global, 2018.
[5] L. Joseph, Learning Robotics Using Python, Chicago: Packt Publishing Ltd, 2018.
[6] O. Gusikhin, Informatics in Control, Automation and Robotics, London: Springer, 2016.
[7] R. Arkin, Governing Lethal Behavior in Autonomous Robots, Paris: CRC Press, 2012.
[8] S. Cameron, Towards Autonomous Robotic Systems: Chicago: Springer, 2011.
[9] J. V. Stafford, Precision Agriculture, Berlin: Wageningen Academic Pub, London.
[10] T. M. Osman, Advances In Cooperative Robotics, London: World Scientific, 2017.
[11] M. Monta, Agricultural Robots: Mechanisms and Practice, Texas: Kyoto University Press,
2011.
[12] S. Mitra, Intelligent Systems Technologies and Applications, Kiev: Springer, 2016.

12
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 12
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.