MEM 355 Control System Design Project: Lateral Dynamics of Boeing 747
VerifiedAdded on 2023/05/28
|10
|867
|82
Project
AI Summary
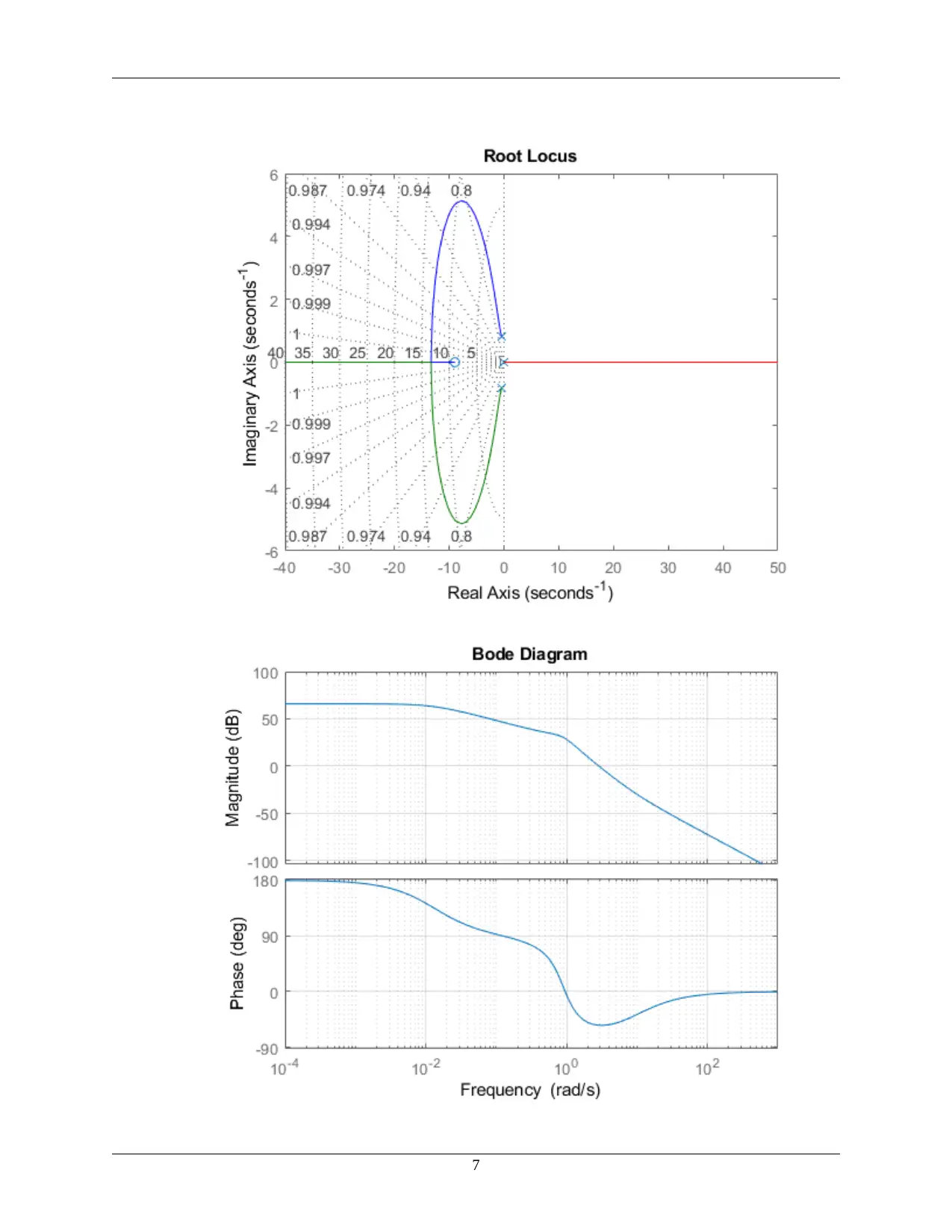
This project focuses on the design of a control system for the lateral dynamics of a Boeing 747, as part of the MEM 355 Control System Design course. The project utilizes MATLAB for computations, including the creation of state equations that incorporate the rudder actuator and a washout filter. The solution involves choosing specific closed-loop poles and obtaining a state feedback controller. The project analyzes the stability of the system using root locus and Bode plots. The design incorporates a rudder actuator and a washout filter to improve yaw rate control. Further analysis includes designing a compensator and an observer for the system. The results are presented with MATLAB code and plots, demonstrating the control system's performance and stability. The project aims to enhance understanding of control system design principles and their application to aircraft dynamics.








1 out of 10
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.