Control Systems Engineering: Analyzing Boeing 747 Dynamics
VerifiedAdded on 2023/05/31
|5
|599
|145
Homework Assignment
AI Summary
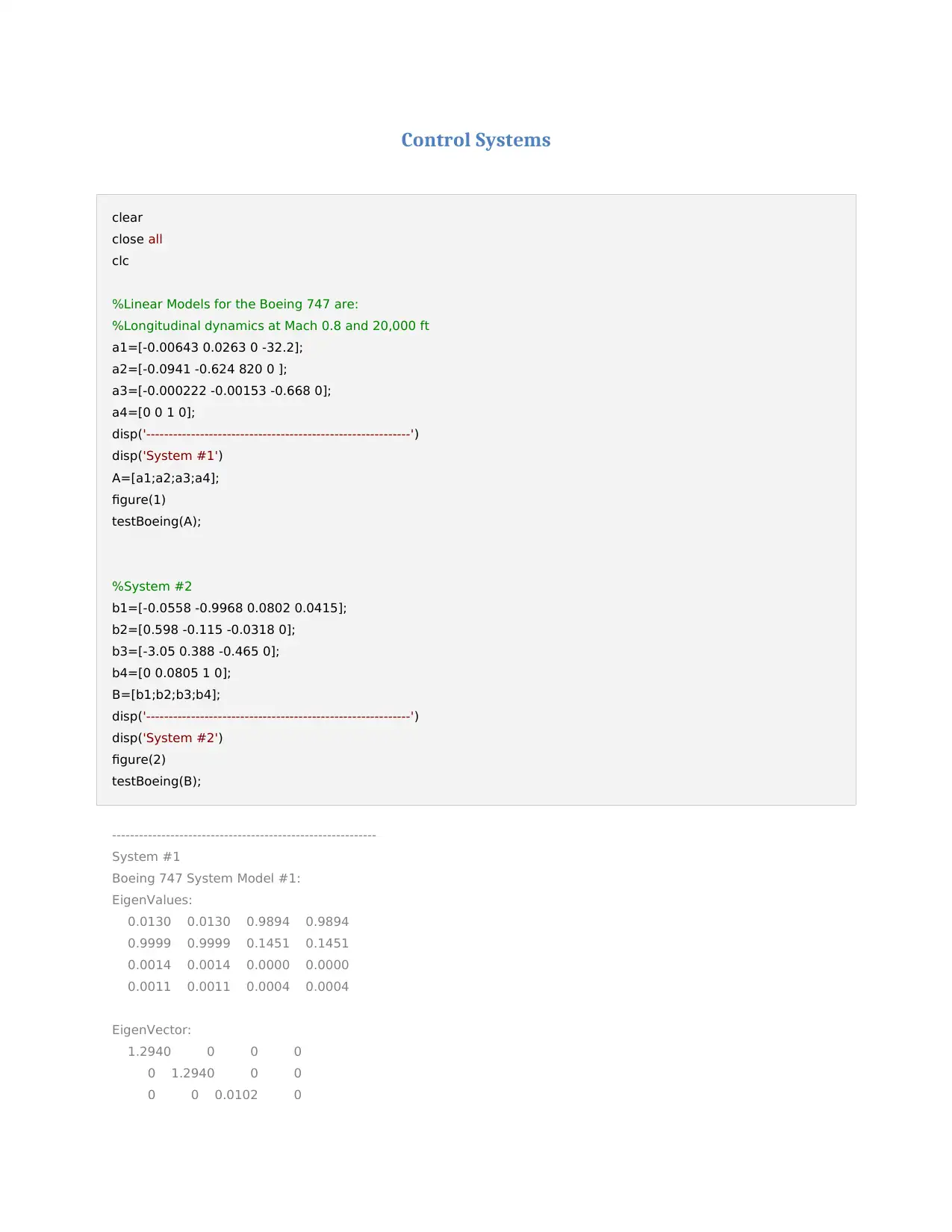
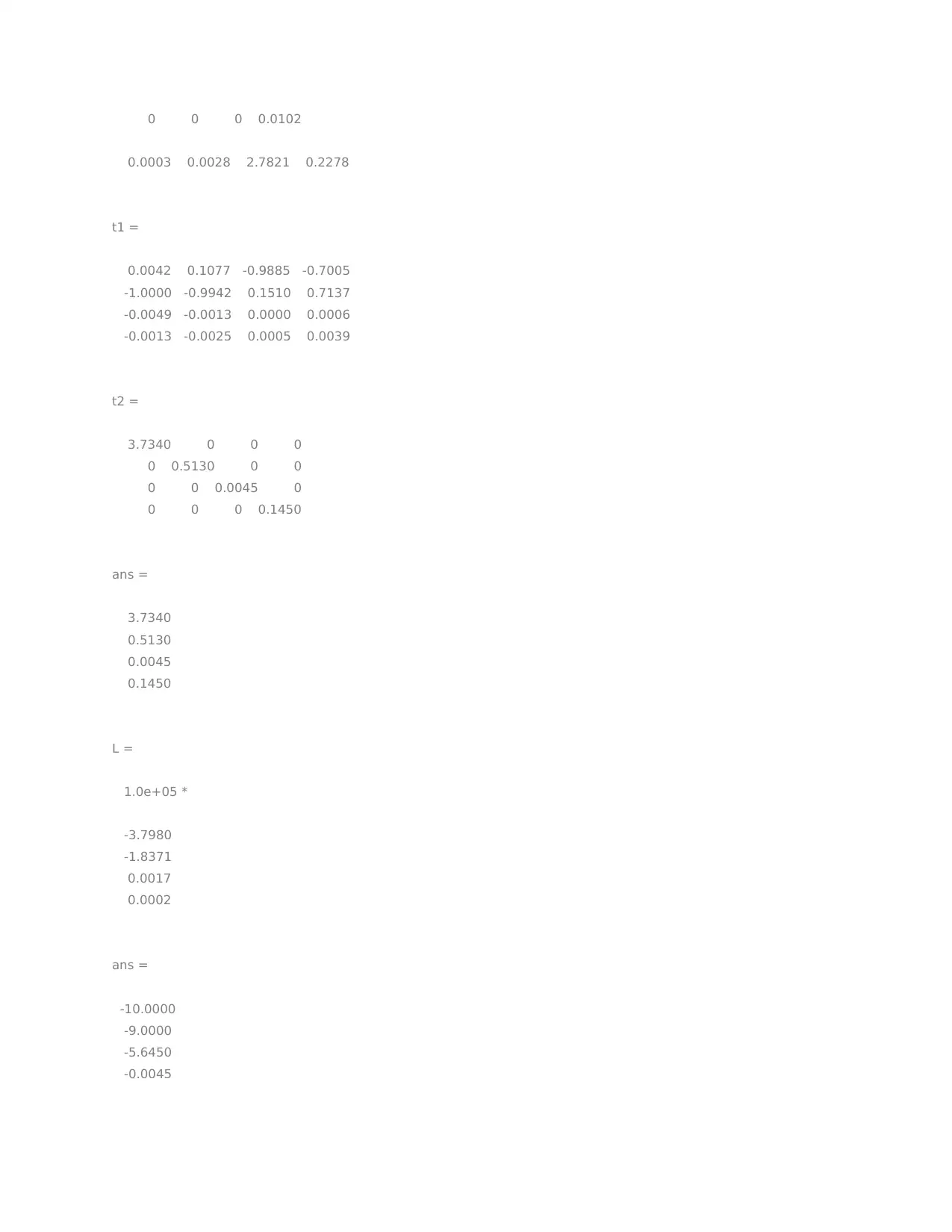
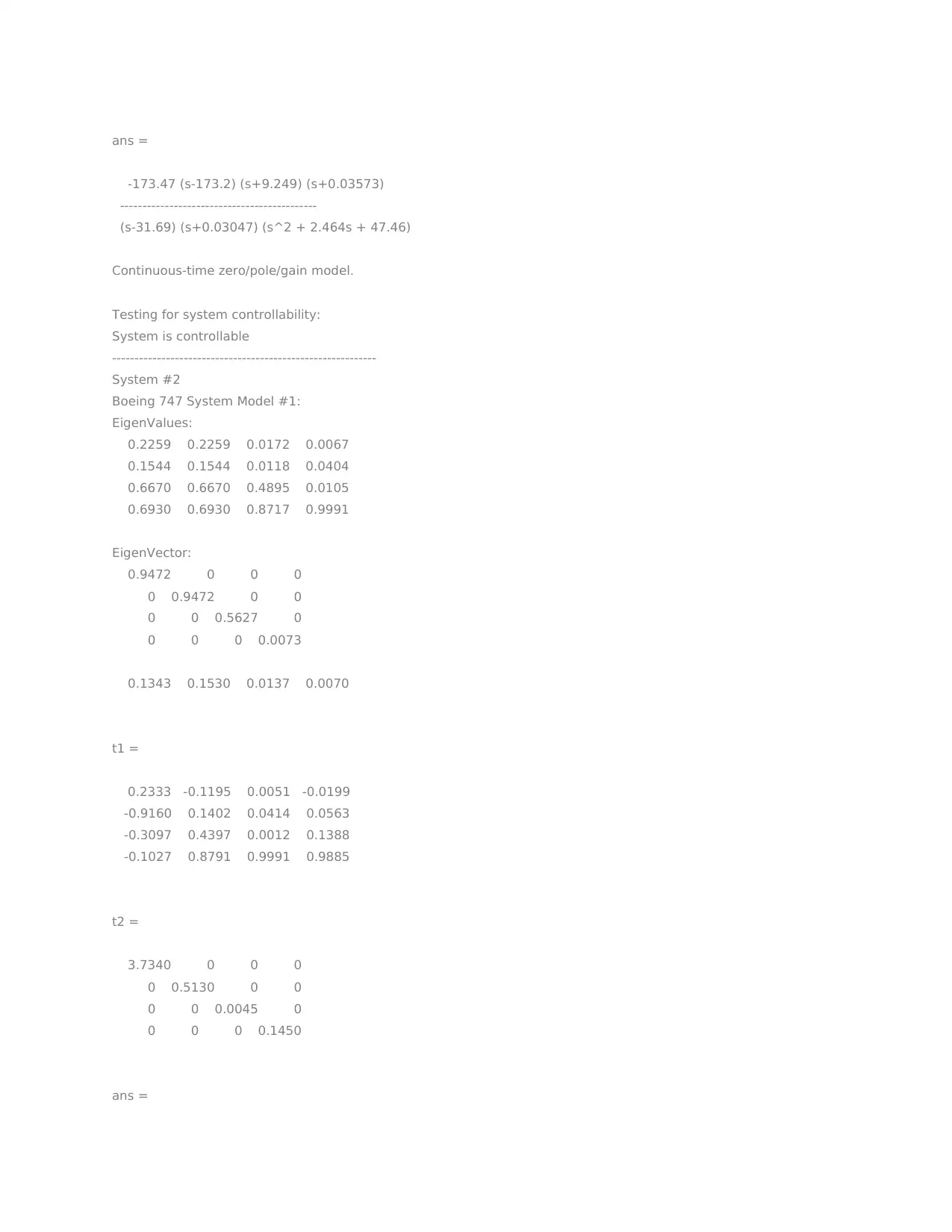
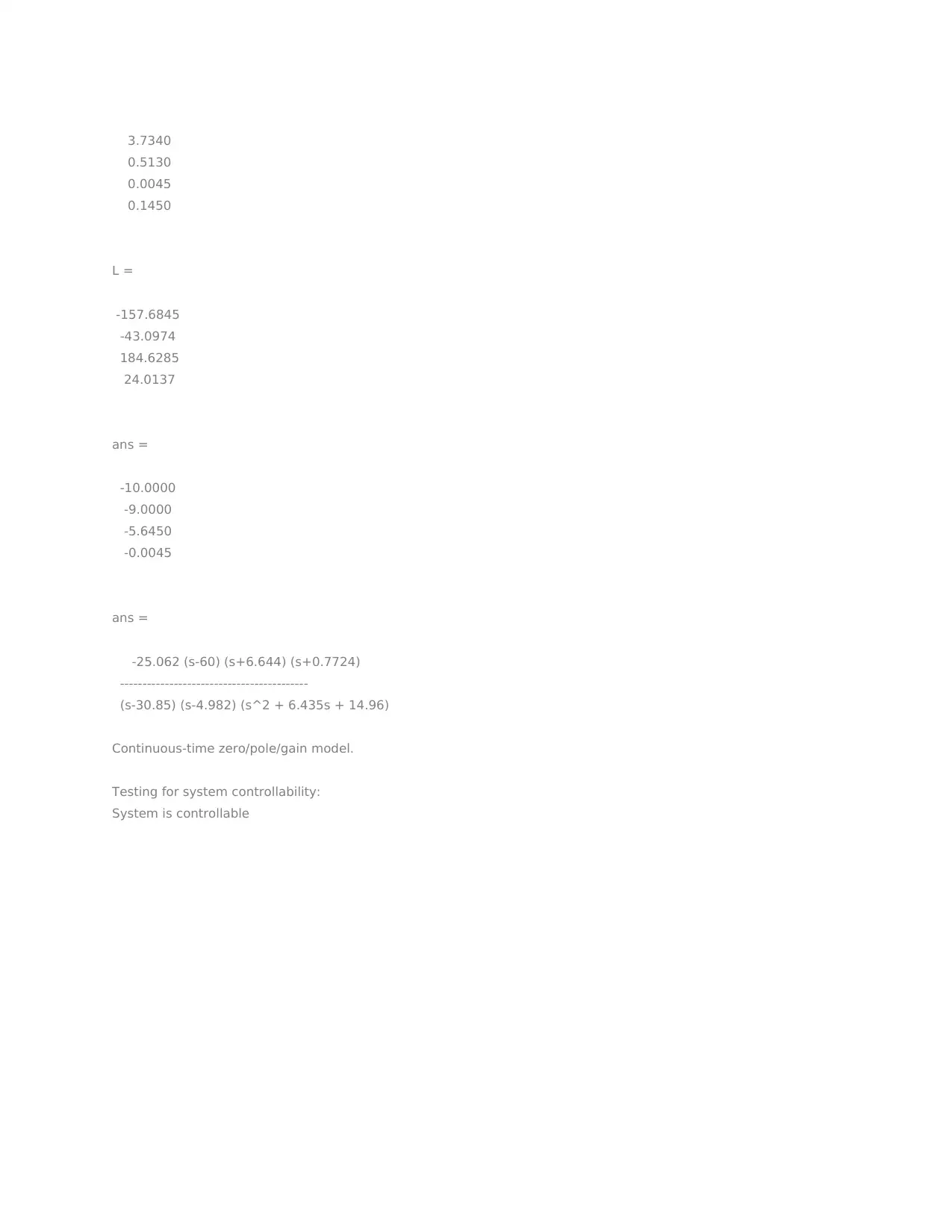
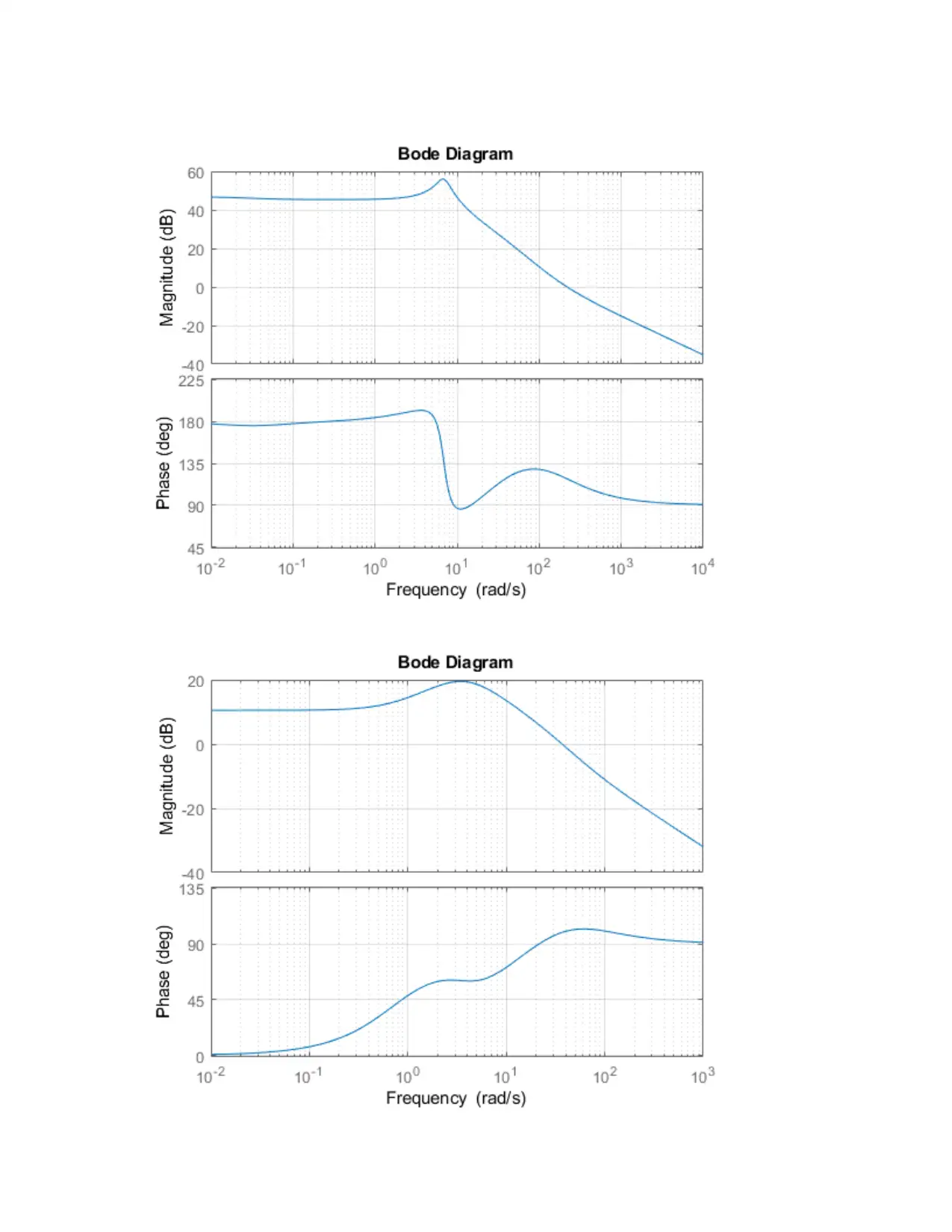
This assignment focuses on the analysis of control systems using linear models for the Boeing 747. It begins by defining linear models for the longitudinal dynamics of the Boeing 747 at Mach 0.8 and 20,000 ft, presenting two different system models (System #1 and System #2) represented by matrices A and B, respectively. For each system, the assignment calculates and displays eigenvalues and eigenvectors, tests for system controllability, and derives transfer functions. The analysis includes determining the stability and control characteristics of each system, providing insights into their dynamic behavior. The assignment utilizes functions to test the Boeing models and determine controllability, highlighting key aspects of control systems engineering.
1 out of 5
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.