Comprehensive Analysis: BLDC Motor Speed Control Techniques Report
VerifiedAdded on 2022/10/19
|8
|1344
|16
Report
AI Summary
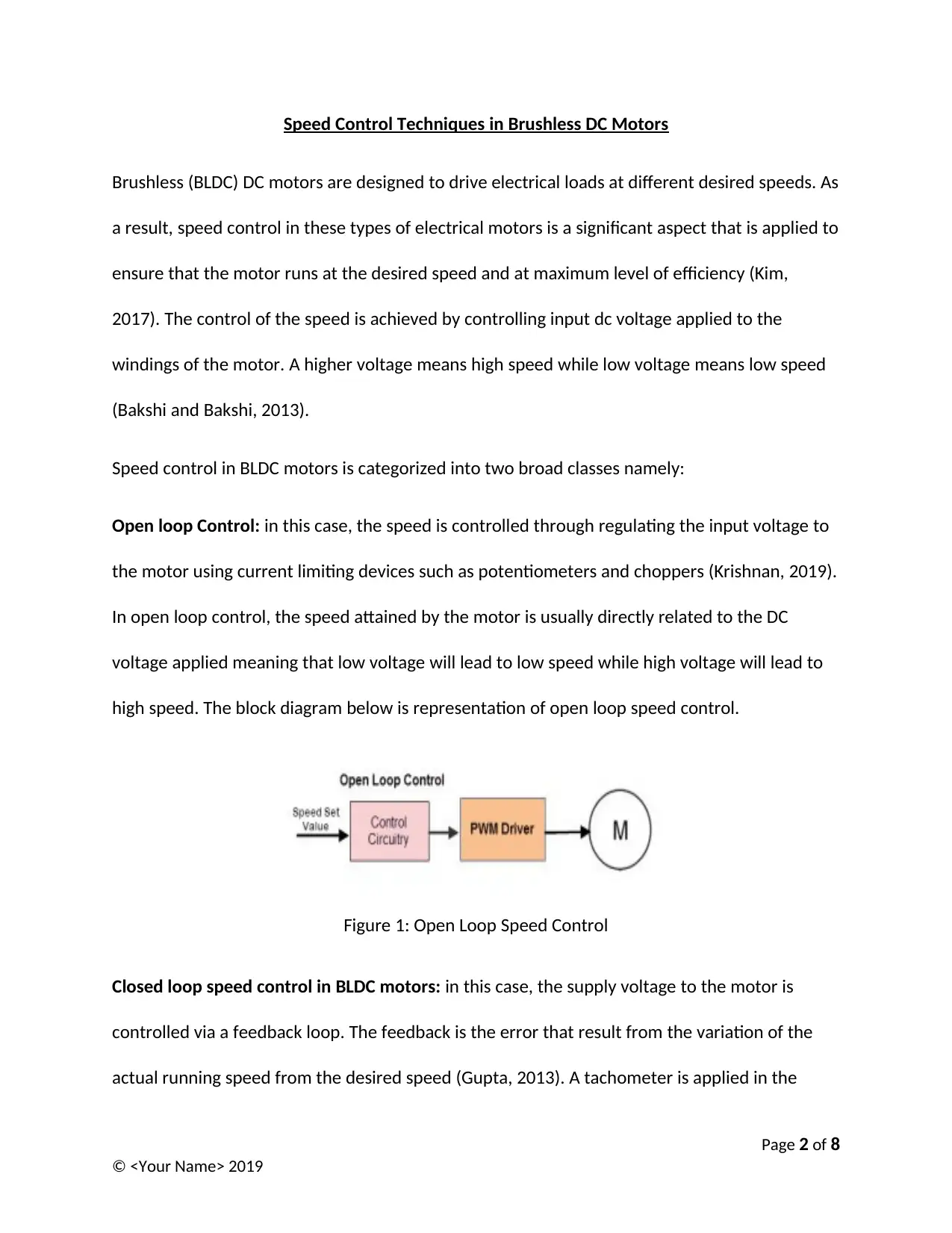
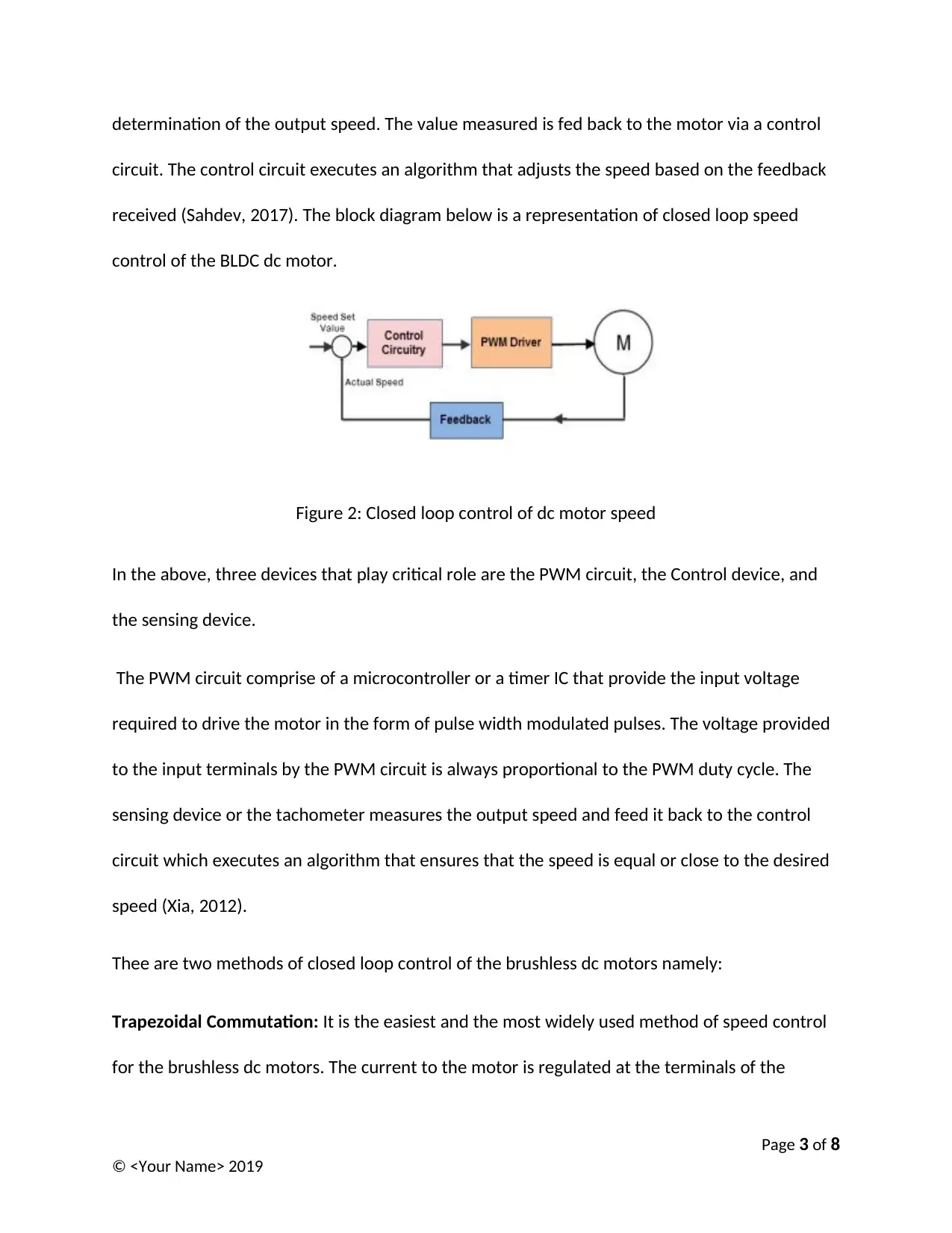
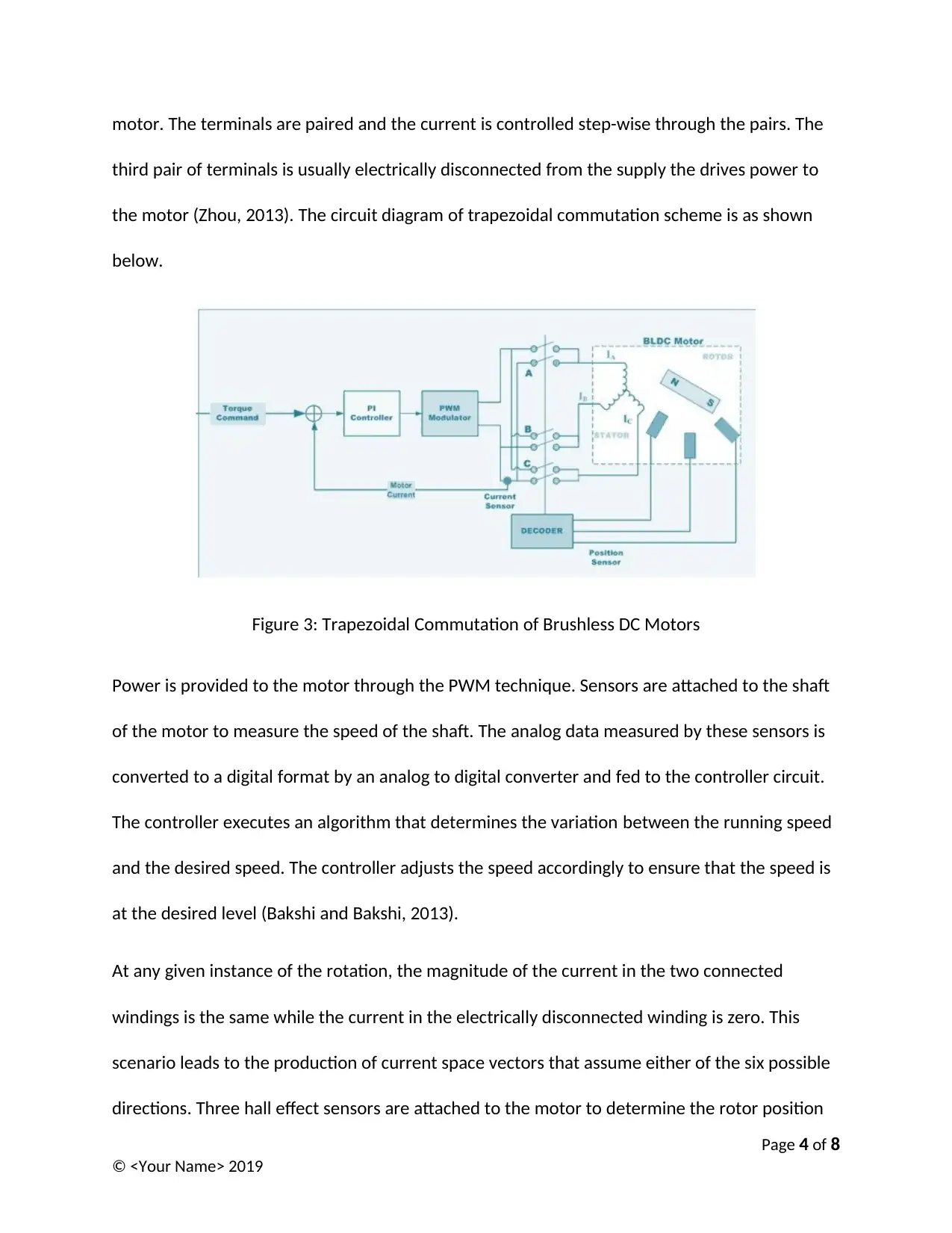
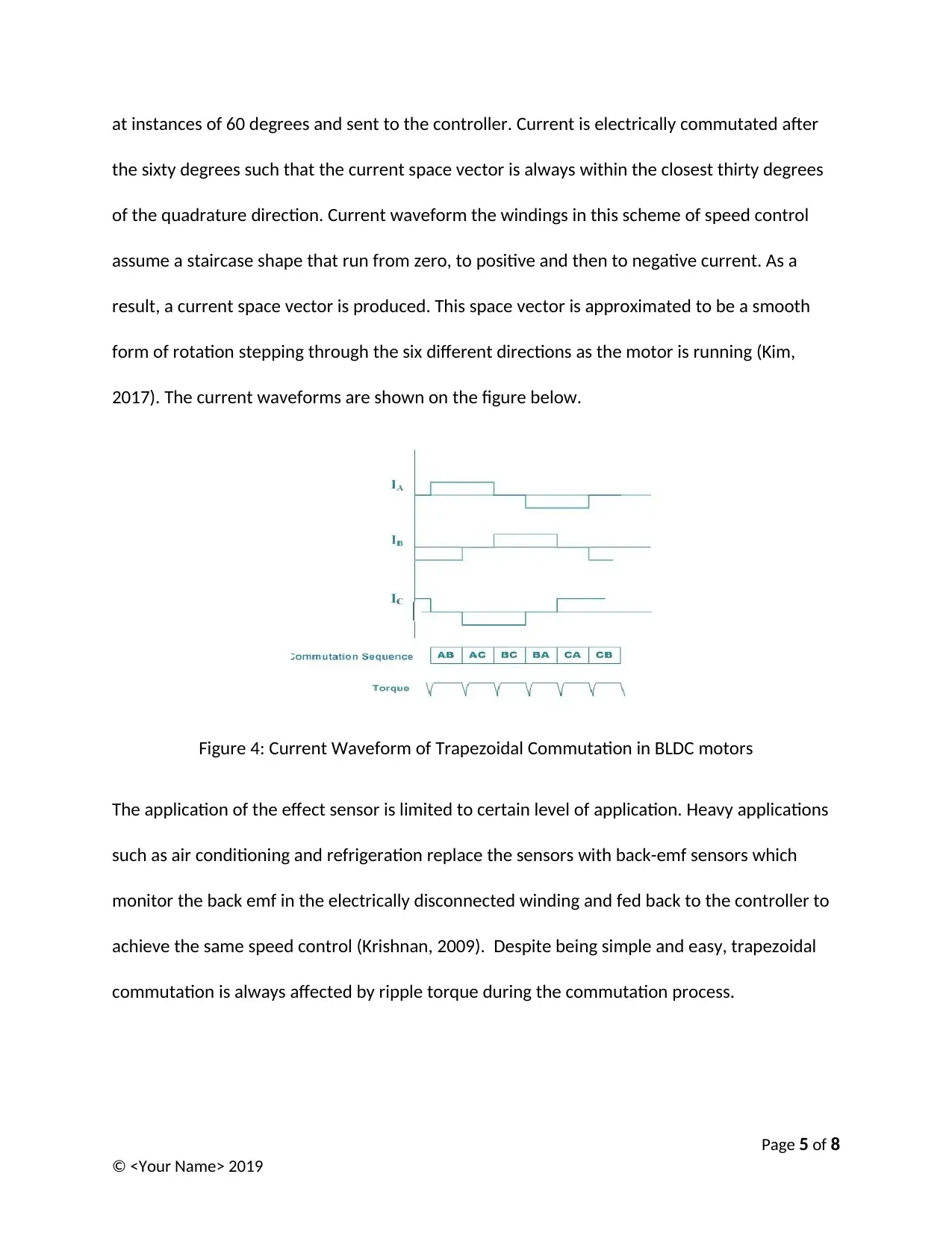
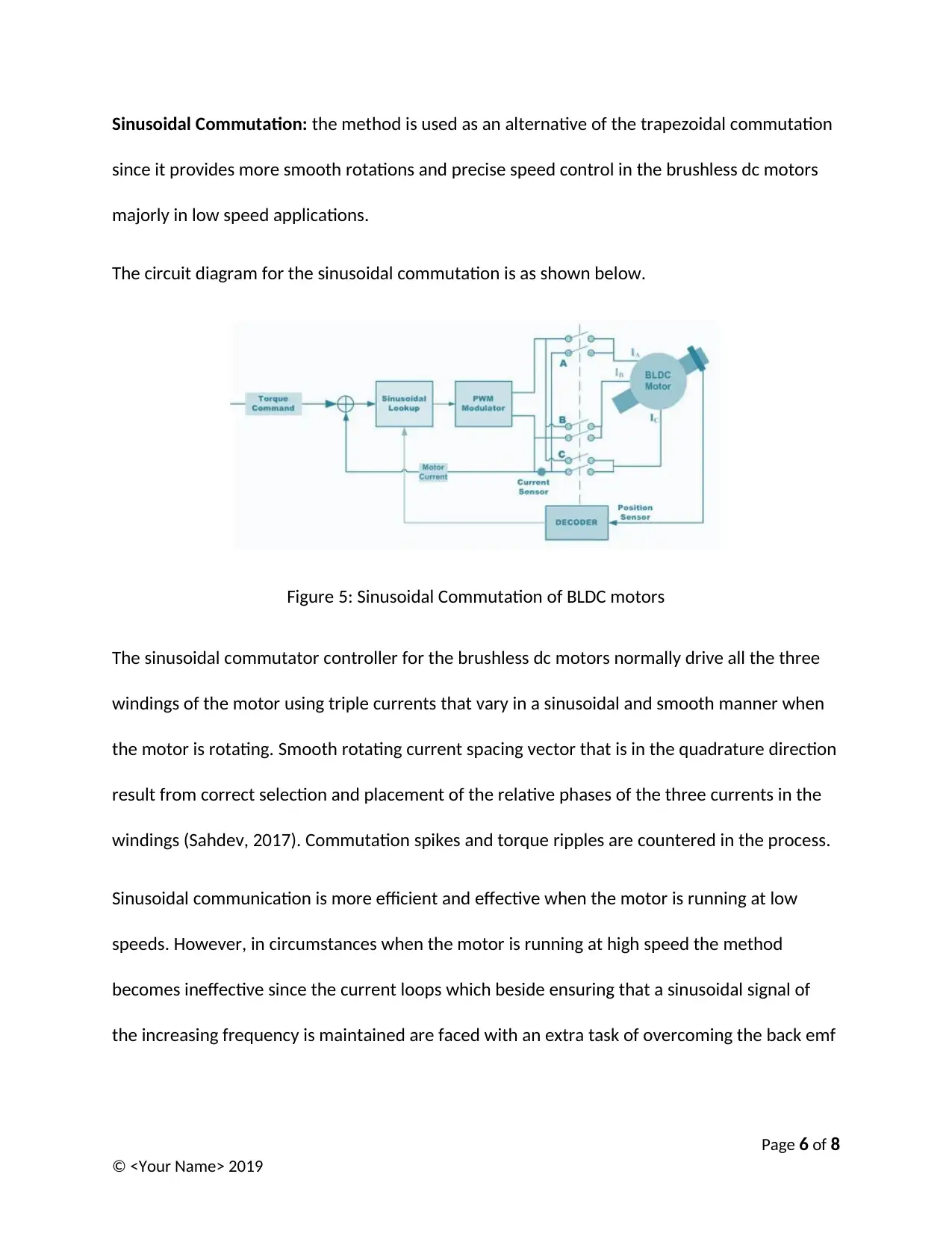
This report delves into the crucial aspect of speed control in Brushless DC (BLDC) motors, essential for efficient operation at desired speeds. The report categorizes speed control into open-loop and closed-loop systems, detailing their respective mechanisms and applications. Open-loop control, achieved by regulating input voltage, is contrasted with closed-loop control, which utilizes feedback loops and devices like tachometers to maintain precise speed regulation. Furthermore, the report examines two primary closed-loop control methods: trapezoidal commutation, the most common approach, and sinusoidal commutation, preferred for smoother rotations, especially at low speeds. The report includes circuit diagrams and current waveforms to illustrate these techniques, along with their advantages and limitations, such as ripple torque in trapezoidal commutation and the effectiveness of sinusoidal commutation at low speeds. References are provided for further reading.
1 out of 8
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.