Control Systems: Analysis and Design of Closed Loop Liquid Level
VerifiedAdded on 2023/06/13
|13
|1986
|311
Report
AI Summary
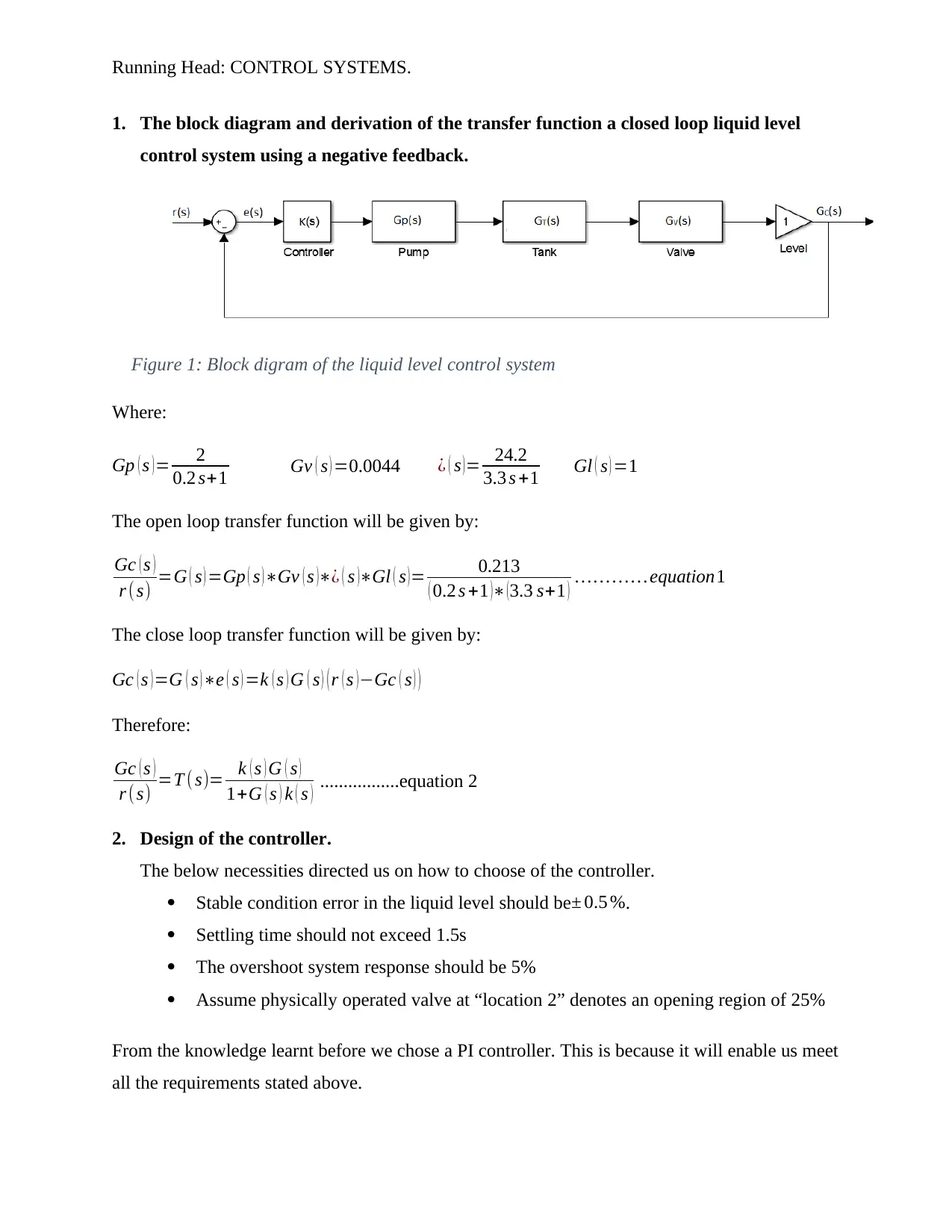
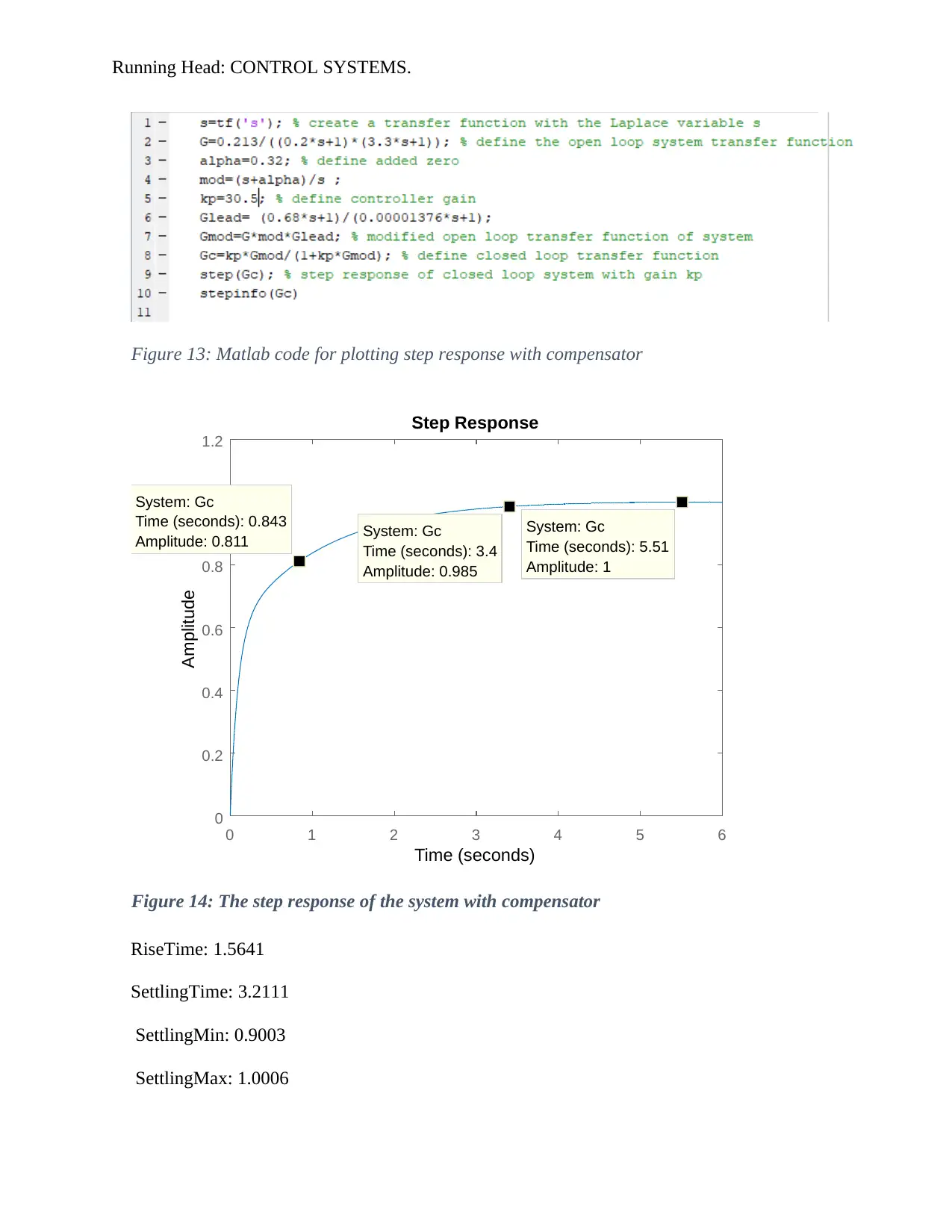
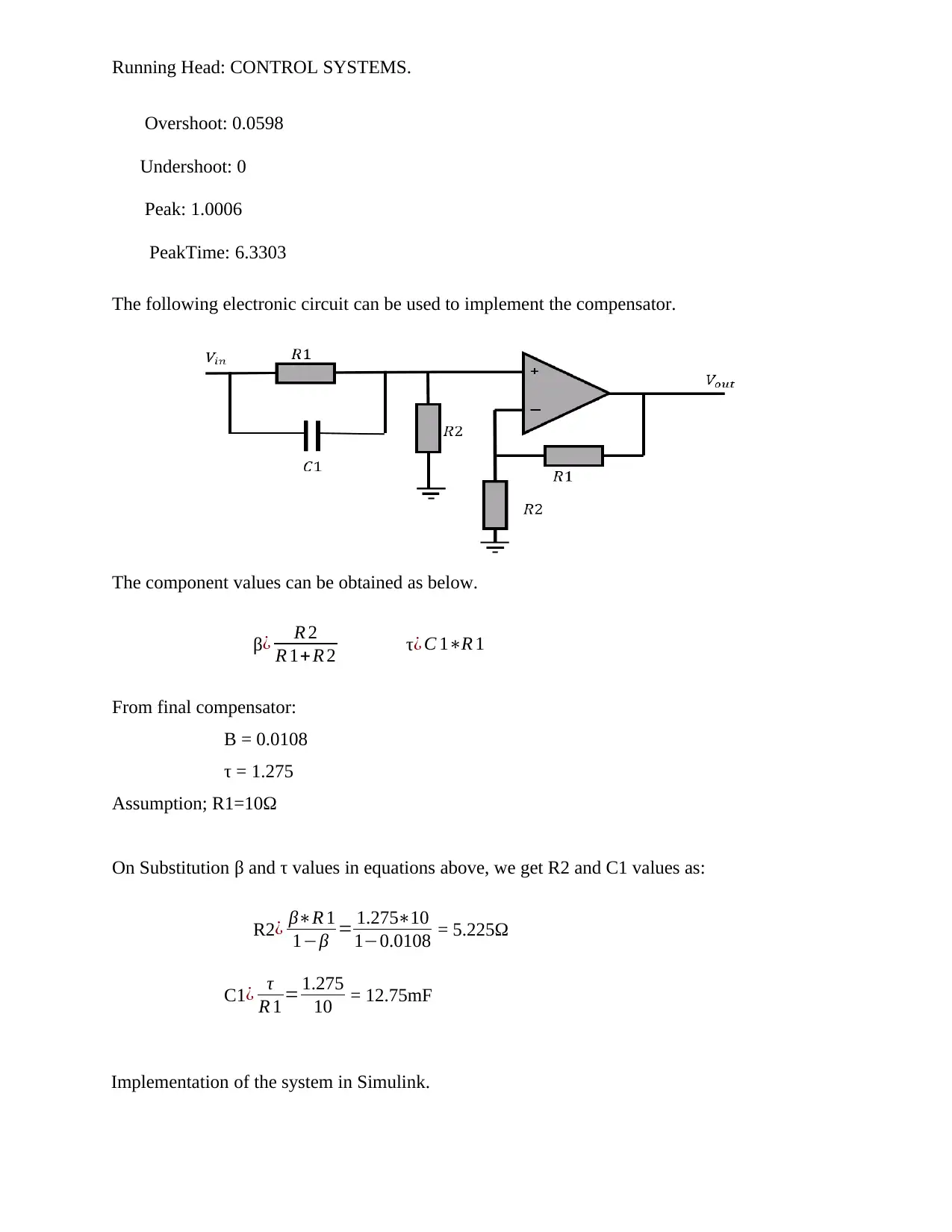
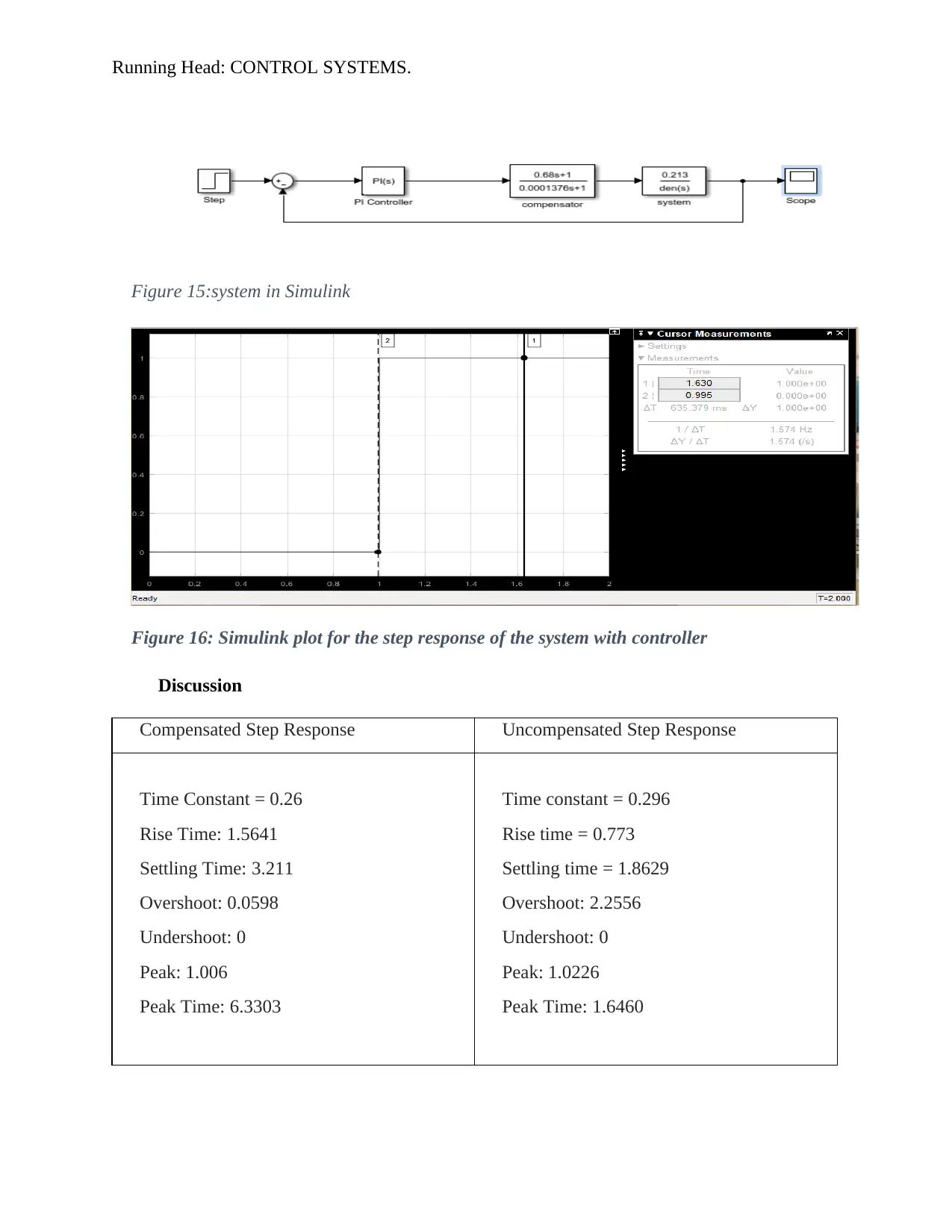
This report presents the design and analysis of a closed-loop liquid level control system using negative feedback. It includes the derivation of the transfer function, controller design with a PI controller to meet specific performance requirements (stable condition error, settling time, and overshoot), and stability analysis using Bode plots and Nyquist plots. The design incorporates MATLAB simulations for root locus analysis, step response evaluation, and compensator design to ensure safe operation with a phase margin of at least 120 degrees. The report also compares the performance of compensated and uncompensated systems, concluding that the compensator improves overshoot and time constant while slightly increasing rise and settling times. Finally, it provides an electronic circuit implementation of the compensator and a Simulink model of the entire system.

1 out of 13



Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.