ENGT5102: Designing a Smart Collaborative Robot for Industry
VerifiedAdded on 2022/09/08
|22
|907
|24
Report
AI Summary
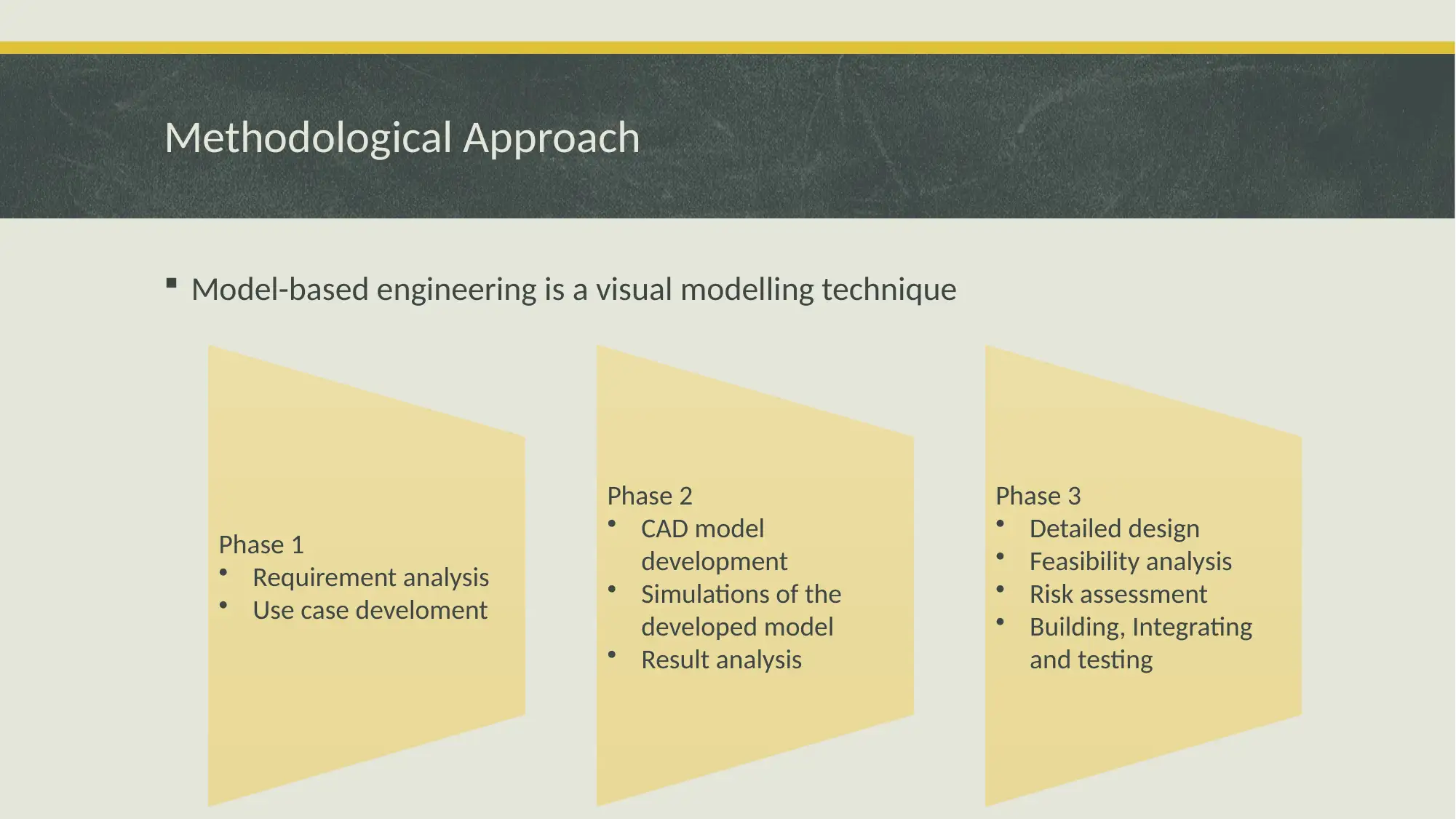
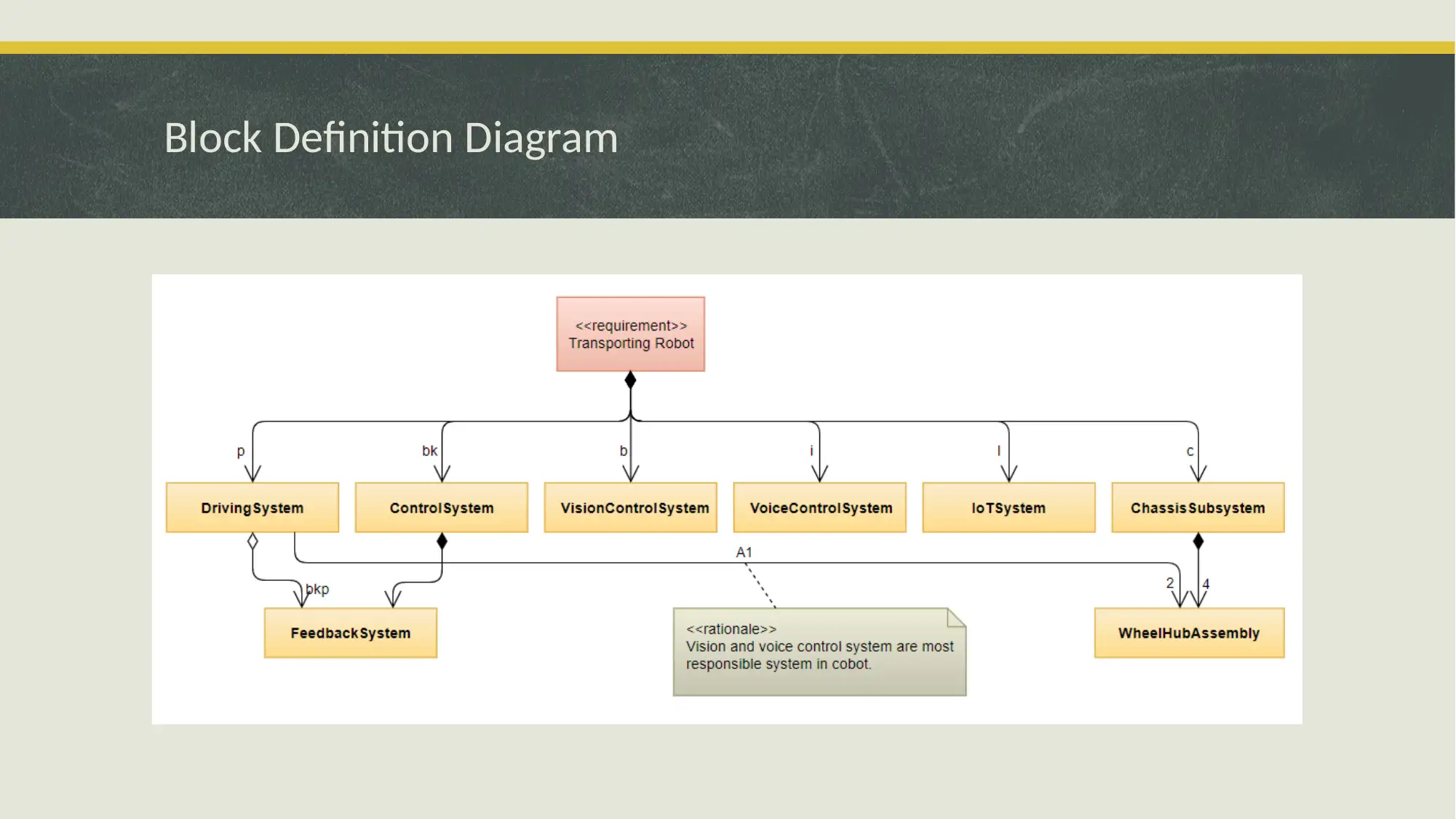
This report details the design of a smart collaborative robot for industrial transportation purposes, outlining the aim, objectives, and methodological approach. It covers key requirements such as a smart vision system and lightweight design. The report includes design specifications, alternative analyses of vision systems (1D, 2D, and 3D), and a final design featuring three driving wheels and various sensors. CAD models and vision simulations using Python are presented, along with the integration of IoT features for information sharing and embedded monitoring. The study concludes with a successful initial study, literature review, alternative system identification, and CAD model development, supported by a list of references. Desklib provides access to similar solved assignments and resources for students.









1 out of 22
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.