Competency Demonstration Report: Four Quadrant DC Motor Controller
VerifiedAdded on 2019/10/31
|10
|1660
|181
Report
AI Summary
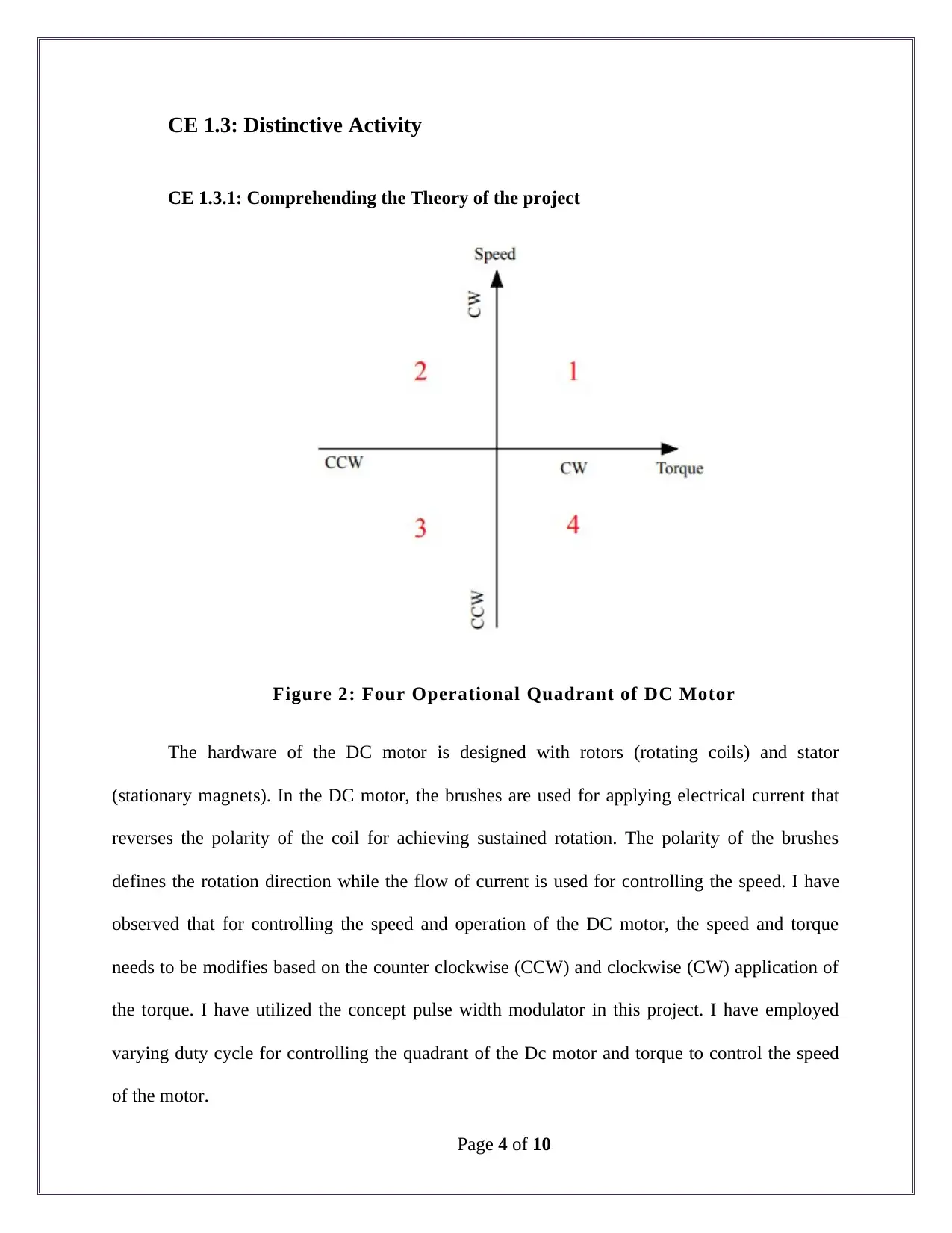
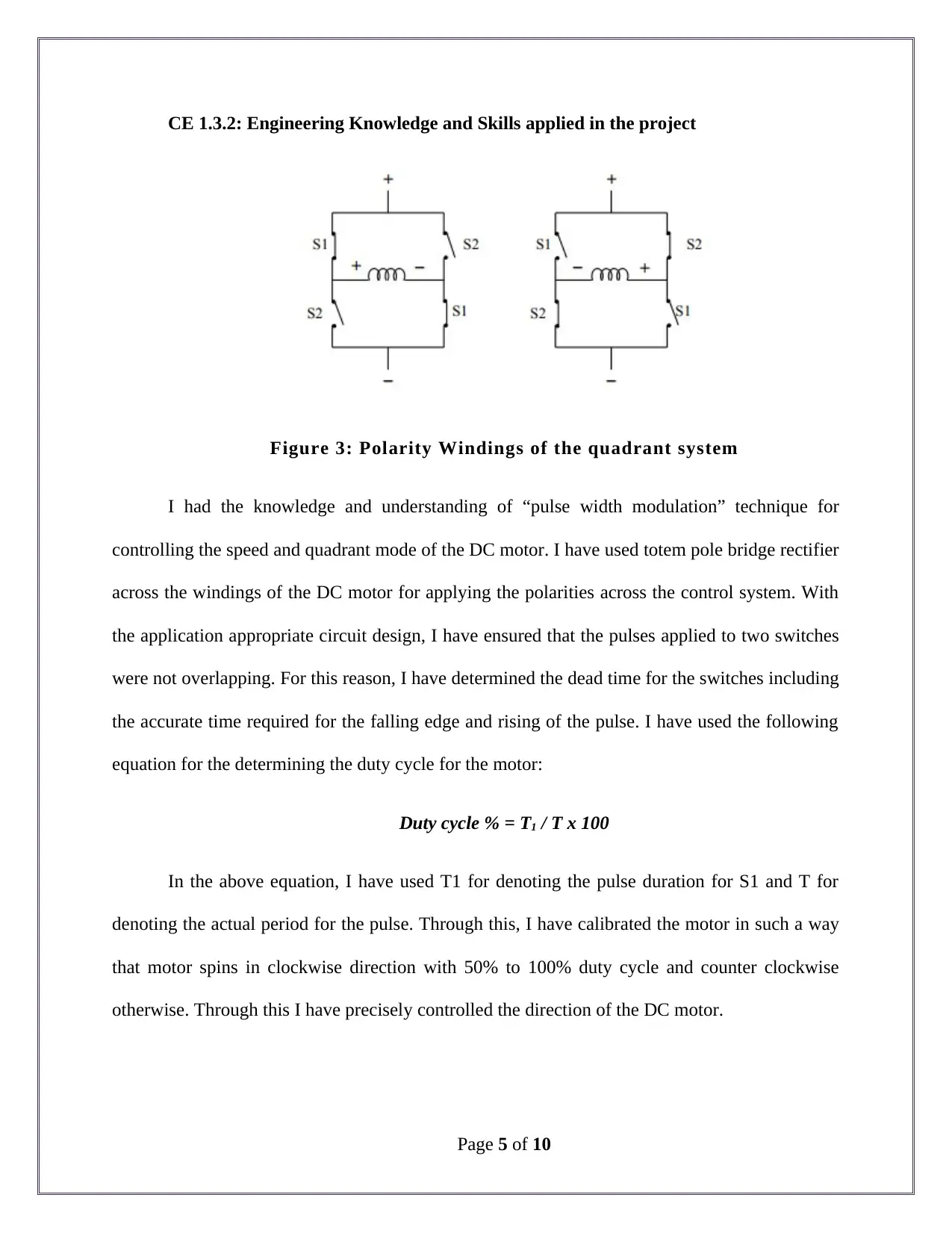
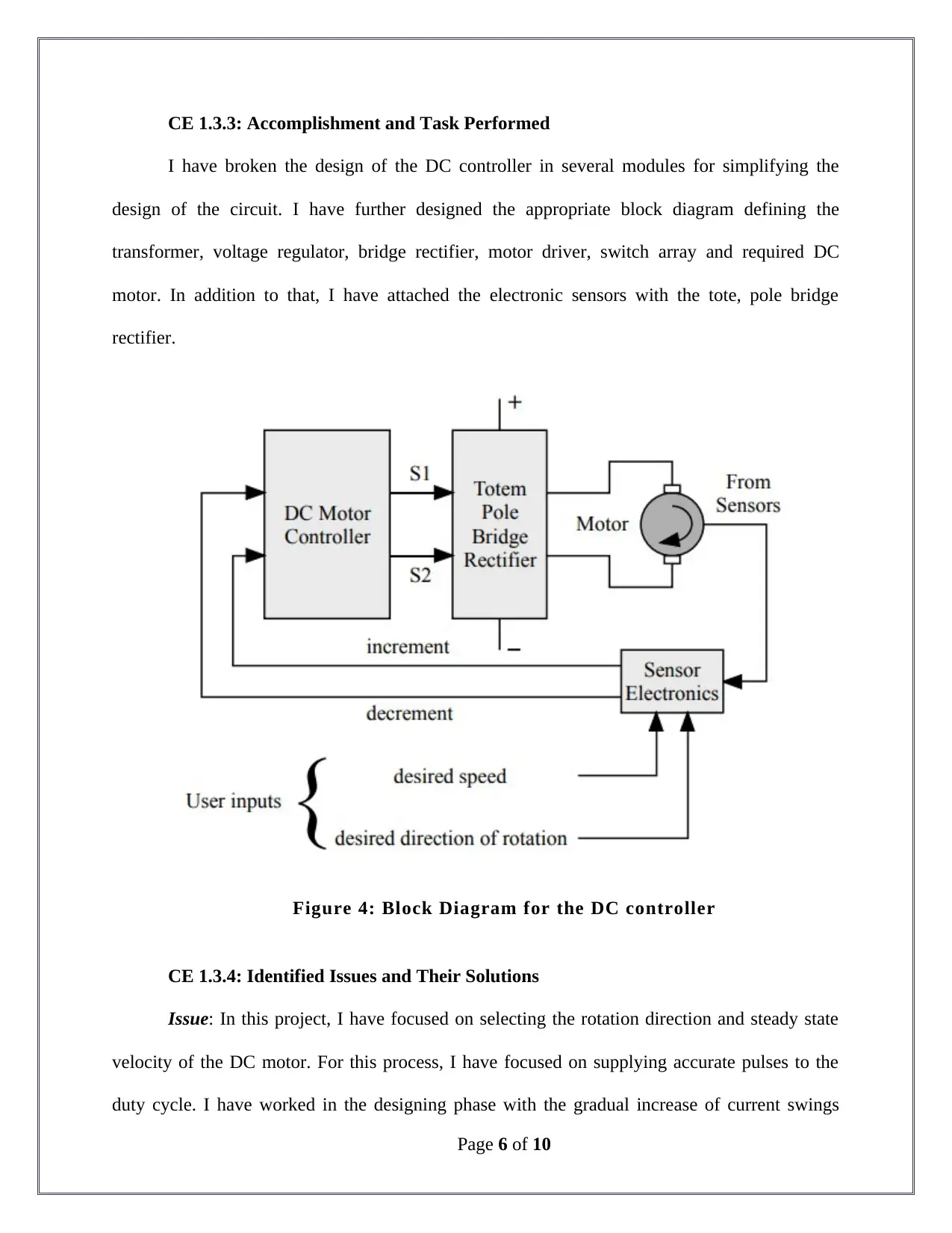
This document is a Competency Demonstration Report (CDR) detailing a student's project on the development of a four-quadrant DC motor controller. The report outlines the project's introduction, background, objectives, and the student's specific role as a team member. It describes the application of pulse width modulation (PWM) for controlling the speed and direction of the DC motor, including the use of VHDL for implementing a finite state machine (FSM). The student highlights the engineering knowledge and skills applied, the tasks performed, and the issues encountered and their solutions. The project involved designing a controller to manage both the speed and operational mode (clockwise, counterclockwise, forward brake, reverse brake) of a DC motor. The report includes block diagrams, circuit designs, and simulation results obtained using Proteus software. The student emphasizes the collaborative aspects of the project, decision-making processes, and the advantages of their approach compared to existing solutions, particularly in the use of Proteus for simulation and the control of both speed and rotational quadrant.
1 out of 10
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.