Computational Fluid Dynamics Project: Cylinder Vibration Analysis
VerifiedAdded on 2023/03/17
|19
|3639
|50
Project
AI Summary
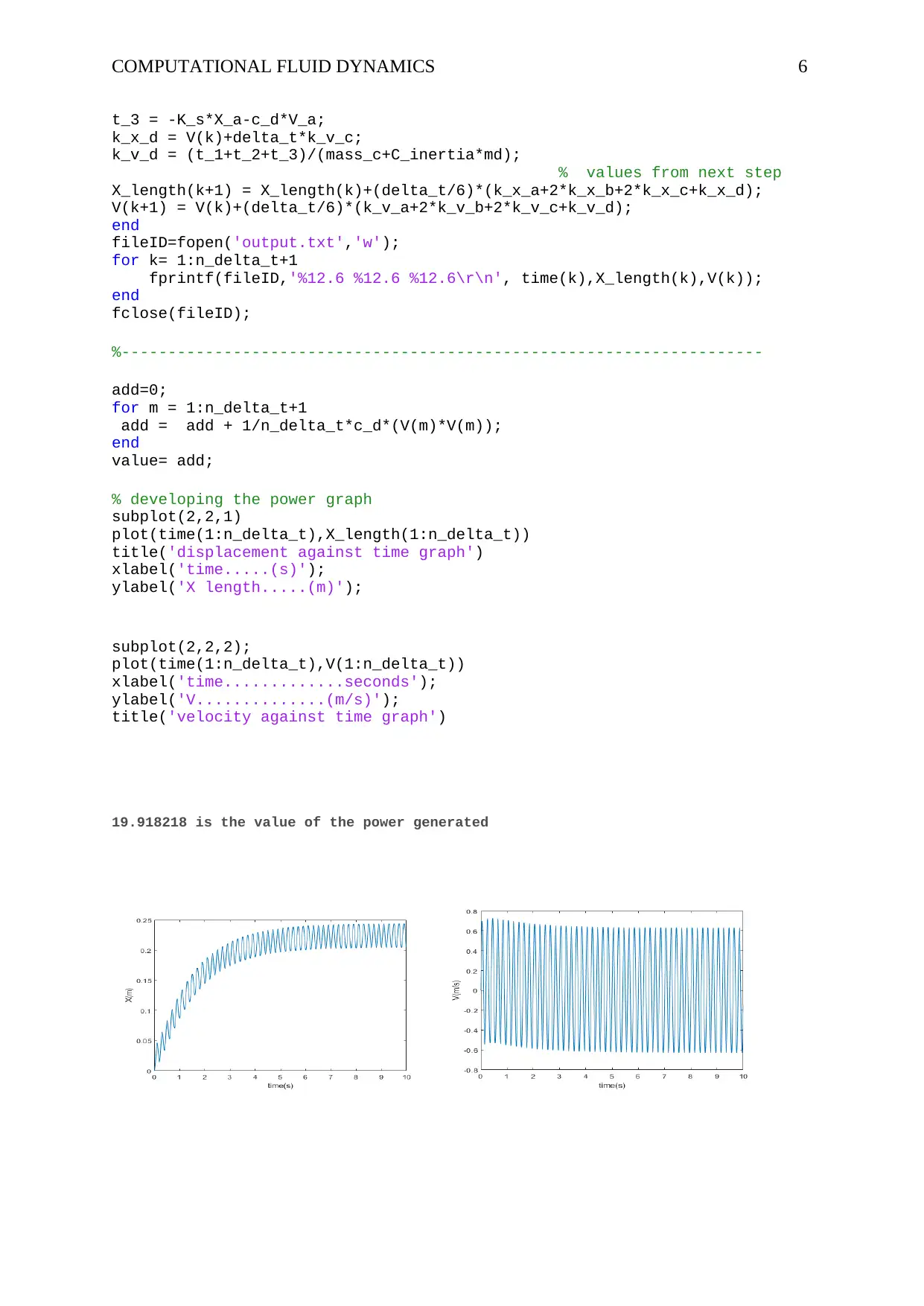
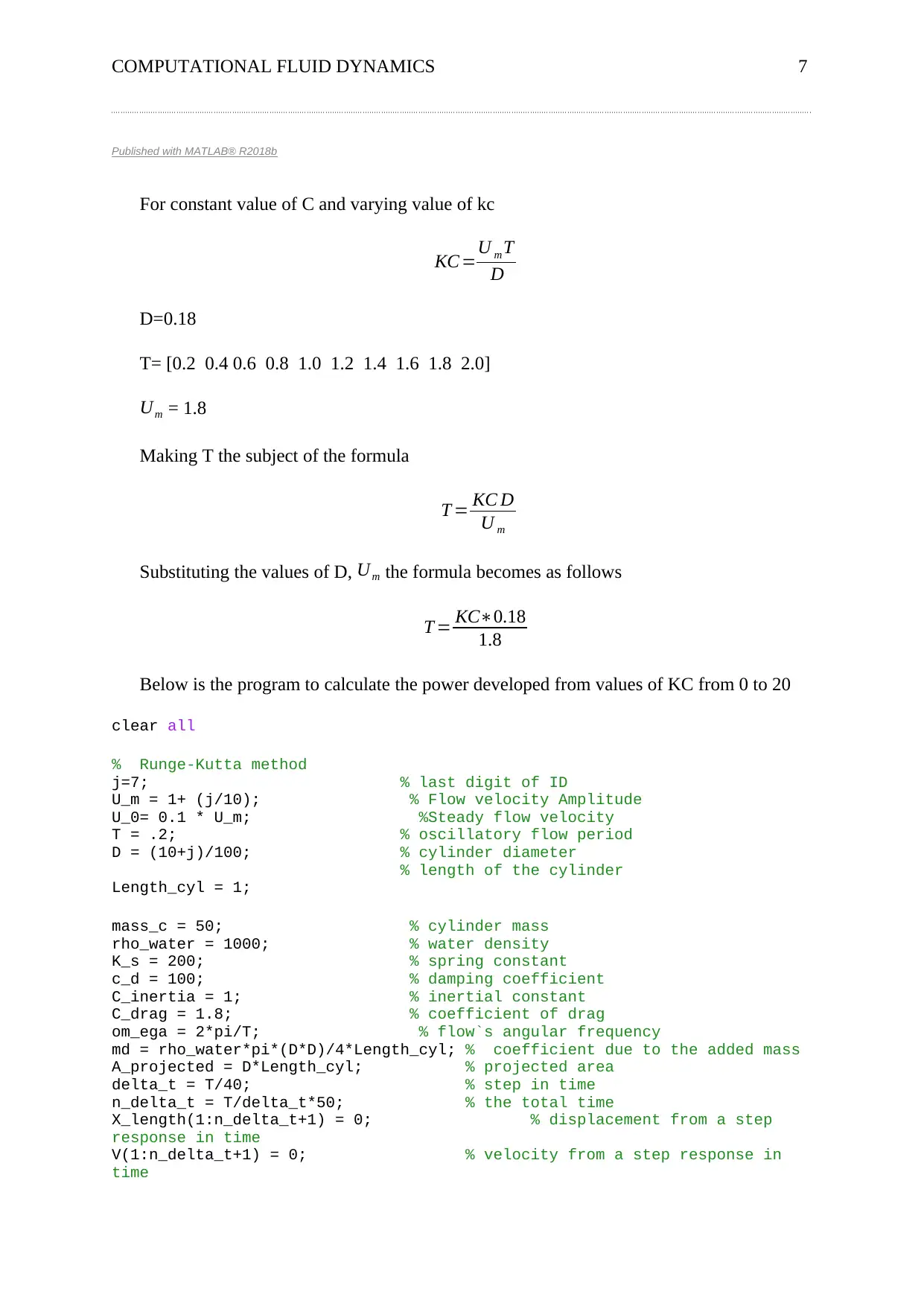
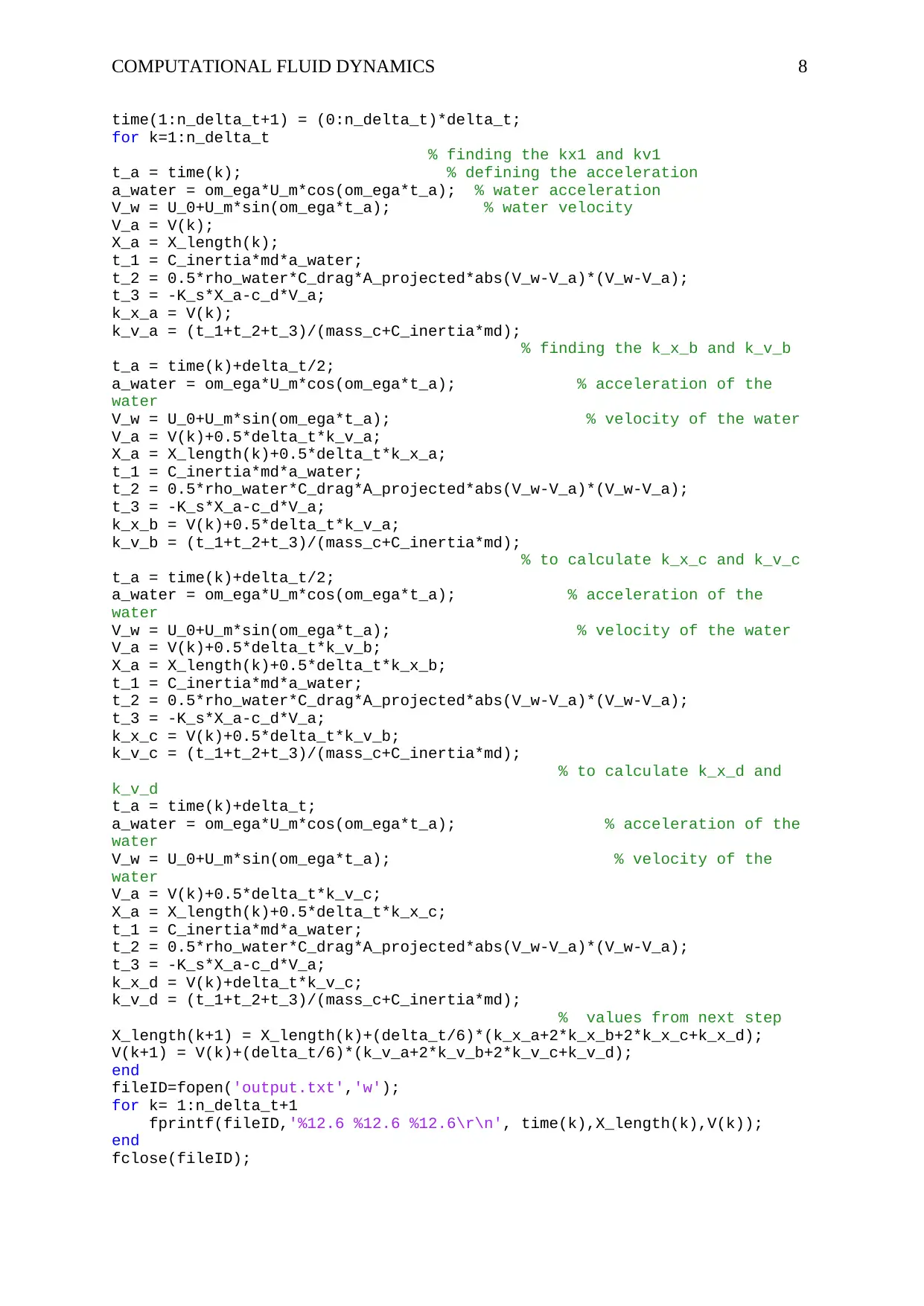
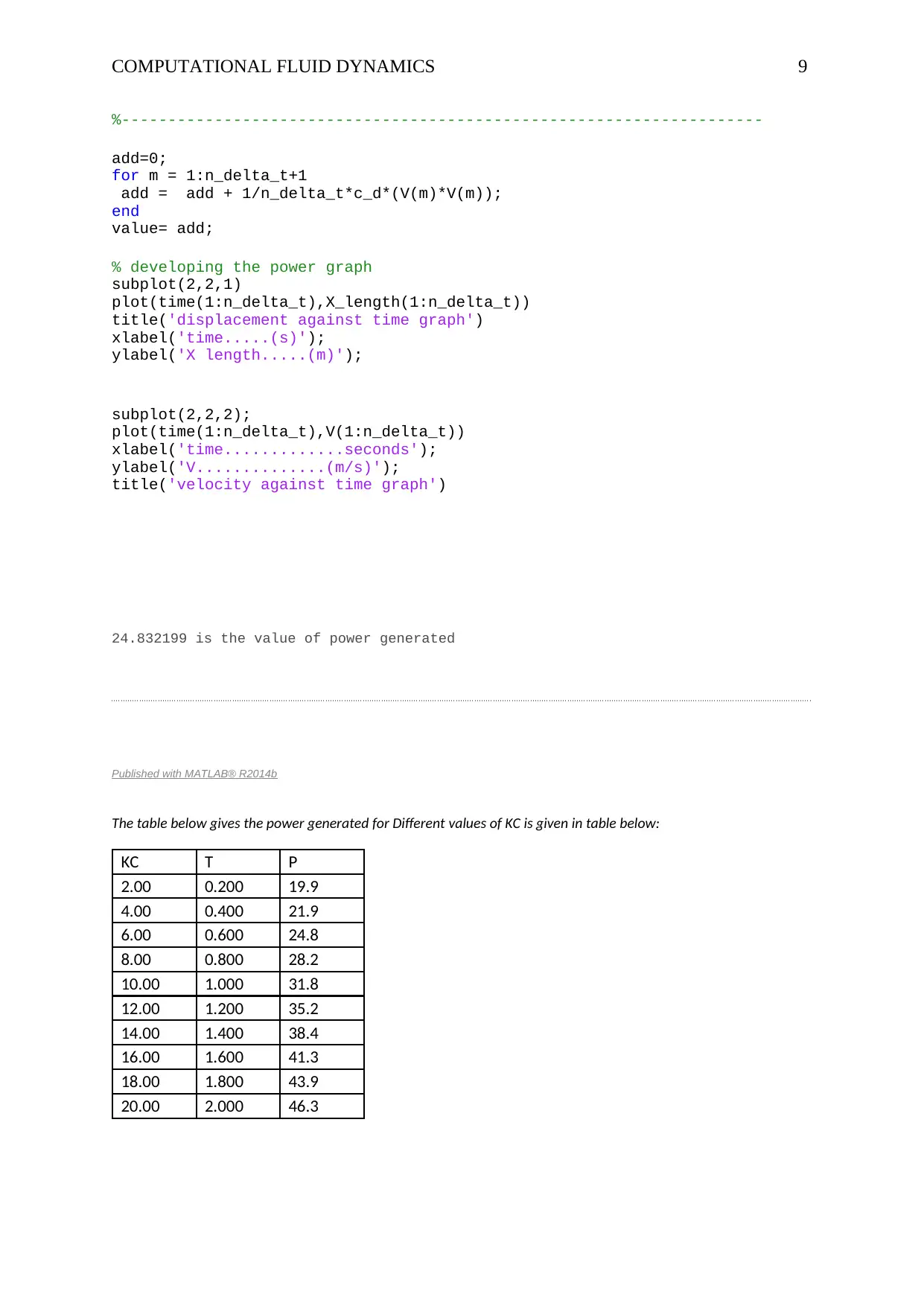
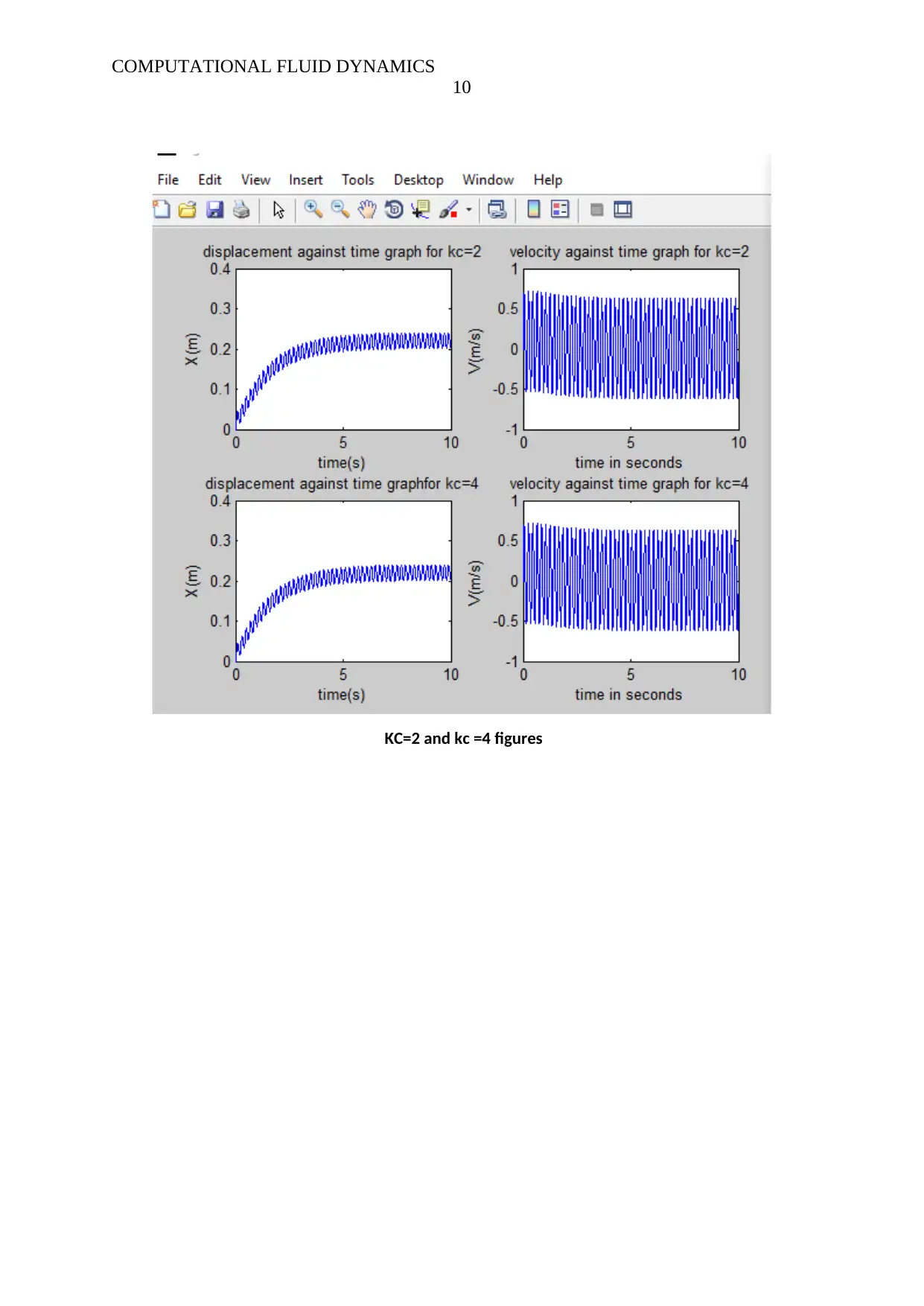
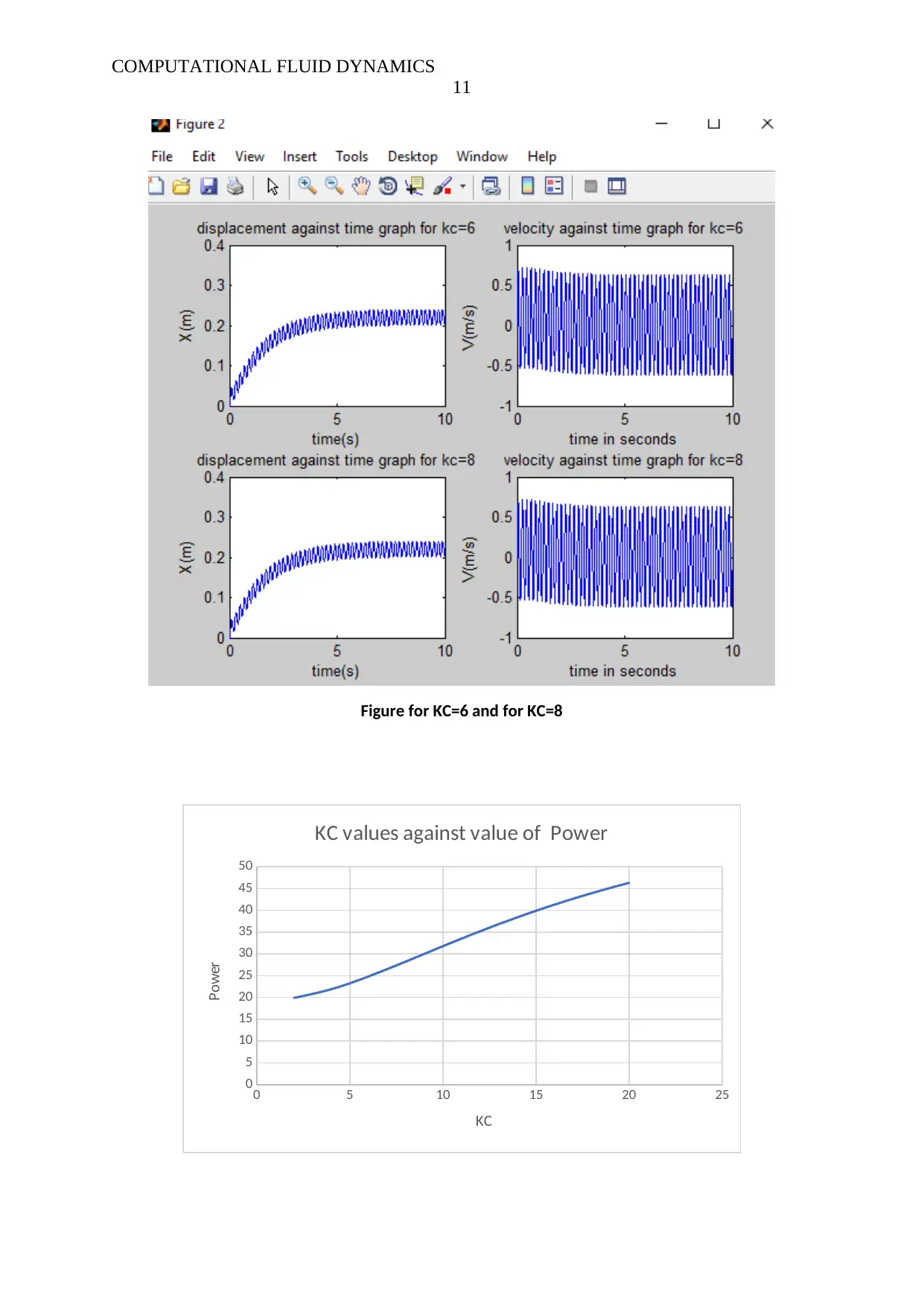
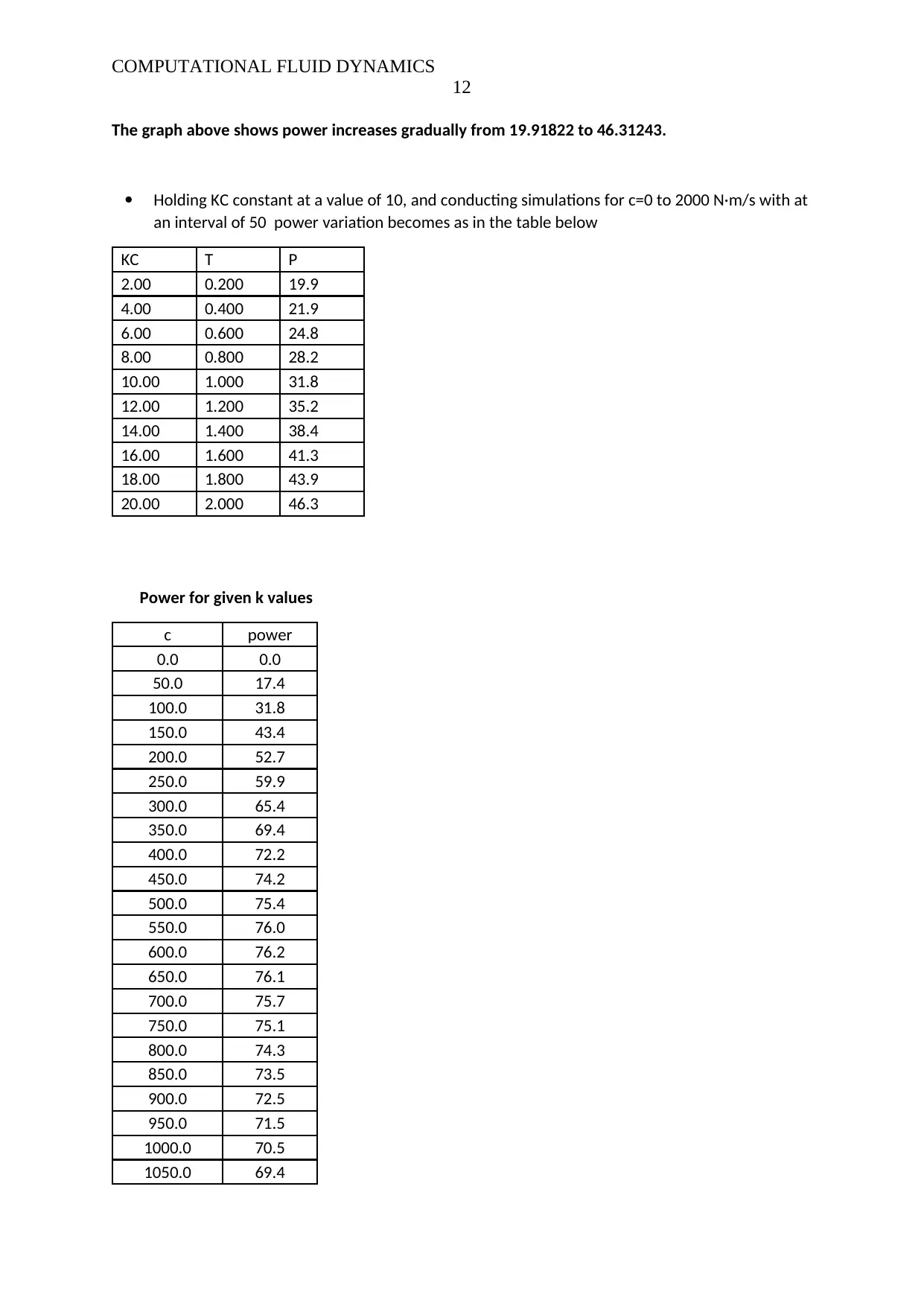
This project delves into the computational fluid dynamics (CFD) analysis of a vibrating cylinder within a fluid environment. The assignment begins with deriving the equation of motion for the cylinder, considering factors such as fluid velocity, drag force, and inertial effects. A numerical method, specifically the Fourth-order Runge-Kutta method, is then developed and implemented using MATLAB to predict the cylinder's vibration. The solution encompasses the development of a MATLAB code, which is used to simulate and analyze the cylinder's displacement, velocity, and the power generated. The results are presented in graphical formats, including displacement and velocity versus time graphs. The study further investigates the impact of varying parameters, such as the coefficient of damping and KC values, on the system's behavior. The report includes detailed explanations of the equations, numerical methods, and the interpretation of the simulation results, providing a comprehensive understanding of the cylinder vibration problem using CFD techniques. The project also discusses the 1-D convection diffusion equation and Navier-Stokes equations. Further, the project covers the stability analysis of the one-dimensional diffusion equation. The final part of the project is to study the influence of different KC and C values on the power generation.

1 out of 19
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.