306SE Control and Instrumentation: DC Motor PID Control Report
VerifiedAdded on 2021/04/17
|36
|6116
|114
Report
AI Summary
This technical report, submitted to the Faculty of Engineering, Environment, and Computing, details the application of continuous and discrete-time PID control to DC motor systems. The report begins with an introduction to control systems, differentiating between open-loop and closed-loop systems, and explaining the role of PID controllers in industrial applications. It then provides a detailed theoretical overview of PID control, including the proportional, integral, and derivative components, and their effects on system performance. The report also covers the technology and state of the art in PID control, including digital control systems and their advantages. Furthermore, it explores modern alternatives to PID control for electromechanical systems, such as online optimization and advanced control techniques. The conclusion emphasizes the importance of PID controllers and highlights future projections in control system design, such as model predictive control. References and figures are included to support the analysis.

FACULTY OF ENGINEERING, ENVIRONMENT, AND COMPUTING
306SE CONTROL AND INSTRUMENTATION 2
TECHNICAL REPORT TITLE:
CONTINUOUS AND DISCRETE TIME PID CONTROL OF DC MOTOR APPLICATION
STUDENT NAME
STUDENT ID NUMBER
LECTURER: Dr. Nazmul Huda
Date of Submission
02nd July 2018
306SE CONTROL AND INSTRUMENTATION 2
TECHNICAL REPORT TITLE:
CONTINUOUS AND DISCRETE TIME PID CONTROL OF DC MOTOR APPLICATION
STUDENT NAME
STUDENT ID NUMBER
LECTURER: Dr. Nazmul Huda
Date of Submission
02nd July 2018
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
TABLE OF CONTENTS
SECTION I..................................................................................................................................................3
INTRODUCTION...................................................................................................................................3
THEORY OF PID CONTROL................................................................................................................7
TECHNOLOGY AND STATE OF THE ART PID CONTROL.............................................................9
MODERN ALTERNATIVES TO PID CONTROL FOR ELECTROMECHANICAL SYSTEMS......10
CONCLUSION.....................................................................................................................................10
FUTURE PROJECTIONS ON PID CONTROL...................................................................................11
SECTION II..............................................................................................................................................12
SECTION III.............................................................................................................................................24
REFERENCES..........................................................................................................................................33
1
SECTION I..................................................................................................................................................3
INTRODUCTION...................................................................................................................................3
THEORY OF PID CONTROL................................................................................................................7
TECHNOLOGY AND STATE OF THE ART PID CONTROL.............................................................9
MODERN ALTERNATIVES TO PID CONTROL FOR ELECTROMECHANICAL SYSTEMS......10
CONCLUSION.....................................................................................................................................10
FUTURE PROJECTIONS ON PID CONTROL...................................................................................11
SECTION II..............................................................................................................................................12
SECTION III.............................................................................................................................................24
REFERENCES..........................................................................................................................................33
1
LIST OF FIGURES
Figure 1 open loop block diagram system...................................................................................................4
Figure 2 The Burglar alarm system in an open loop system........................................................................4
Figure 3 Closed loop system with a unity feedback.....................................................................................5
Figure 4 Air Conditioner: Example of a closed loop control system...........................................................5
Figure 5 The Process flow diagram of the closed-loop system with PID controller....................................6
Figure 6 The PID controller components in parallel implementation in a control system...........................6
2
Figure 1 open loop block diagram system...................................................................................................4
Figure 2 The Burglar alarm system in an open loop system........................................................................4
Figure 3 Closed loop system with a unity feedback.....................................................................................5
Figure 4 Air Conditioner: Example of a closed loop control system...........................................................5
Figure 5 The Process flow diagram of the closed-loop system with PID controller....................................6
Figure 6 The PID controller components in parallel implementation in a control system...........................6
2
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
SECTION I
Pi and PID control overview and applications
INTRODUCTION
Control is crucial in industrial applications since it would be quite challenging to perform
the tasks as assigned to a machine accurately. The controls systems are meant to direct, instruct,
and regulate the tools and devices in the industries. The control systems are applied in
mechanical, automotive, electrical, and pneumatic systems. The mechanical systems, for
instance, need a control where the input and intended output are controlled. For all the aforesaid
different types of systems, there are two classifications in control engineering. The PID
controller finds application in chemical industries based on its rate of success in practical
applications of this nature. The systems can either be open-loop systems or closed-loop systems.
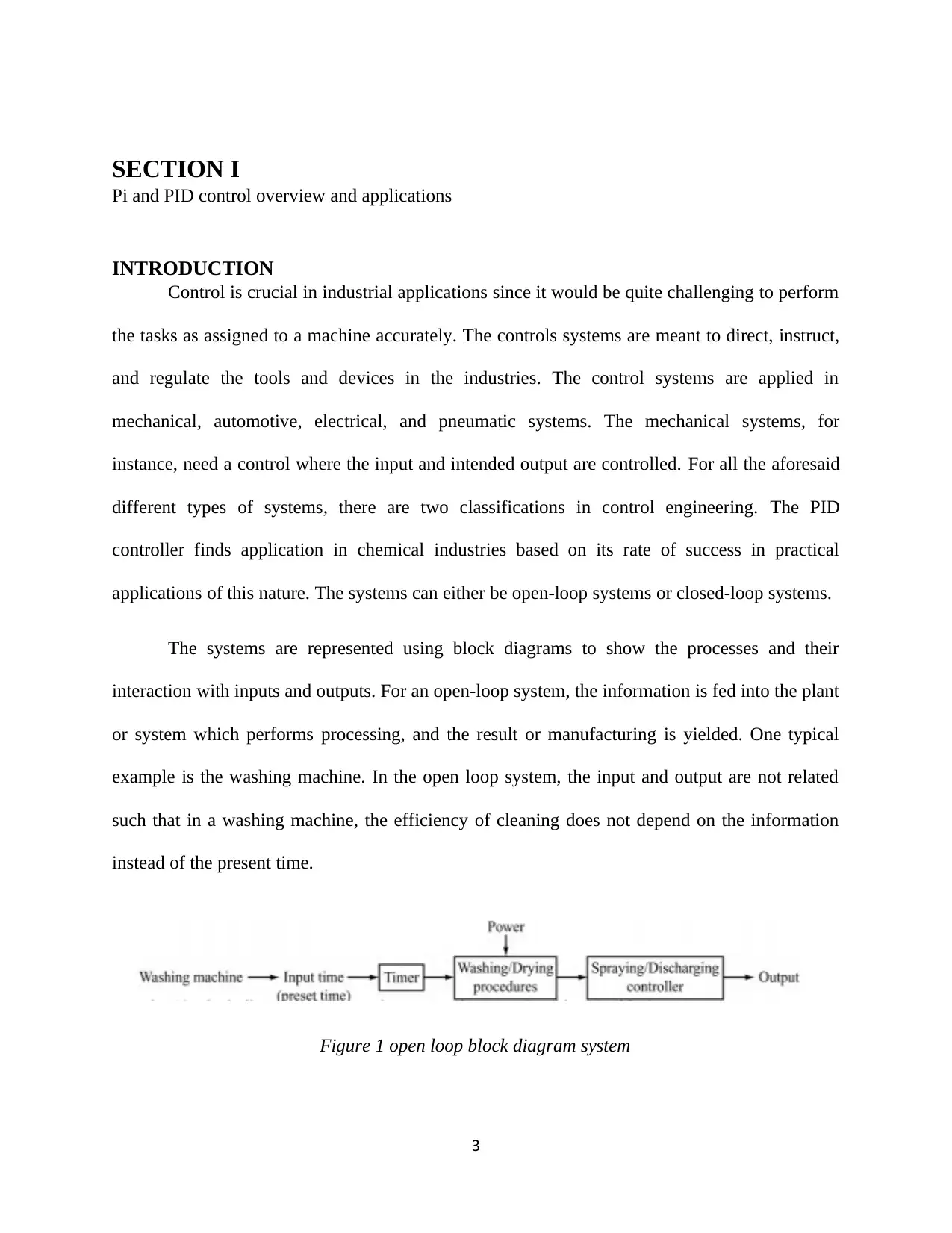
The systems are represented using block diagrams to show the processes and their
interaction with inputs and outputs. For an open-loop system, the information is fed into the plant
or system which performs processing, and the result or manufacturing is yielded. One typical
example is the washing machine. In the open loop system, the input and output are not related
such that in a washing machine, the efficiency of cleaning does not depend on the information
instead of the present time.
Figure 1 open loop block diagram system
3
Pi and PID control overview and applications
INTRODUCTION
Control is crucial in industrial applications since it would be quite challenging to perform
the tasks as assigned to a machine accurately. The controls systems are meant to direct, instruct,
and regulate the tools and devices in the industries. The control systems are applied in
mechanical, automotive, electrical, and pneumatic systems. The mechanical systems, for
instance, need a control where the input and intended output are controlled. For all the aforesaid
different types of systems, there are two classifications in control engineering. The PID
controller finds application in chemical industries based on its rate of success in practical
applications of this nature. The systems can either be open-loop systems or closed-loop systems.
The systems are represented using block diagrams to show the processes and their
interaction with inputs and outputs. For an open-loop system, the information is fed into the plant
or system which performs processing, and the result or manufacturing is yielded. One typical
example is the washing machine. In the open loop system, the input and output are not related
such that in a washing machine, the efficiency of cleaning does not depend on the information
instead of the present time.
Figure 1 open loop block diagram system
3
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
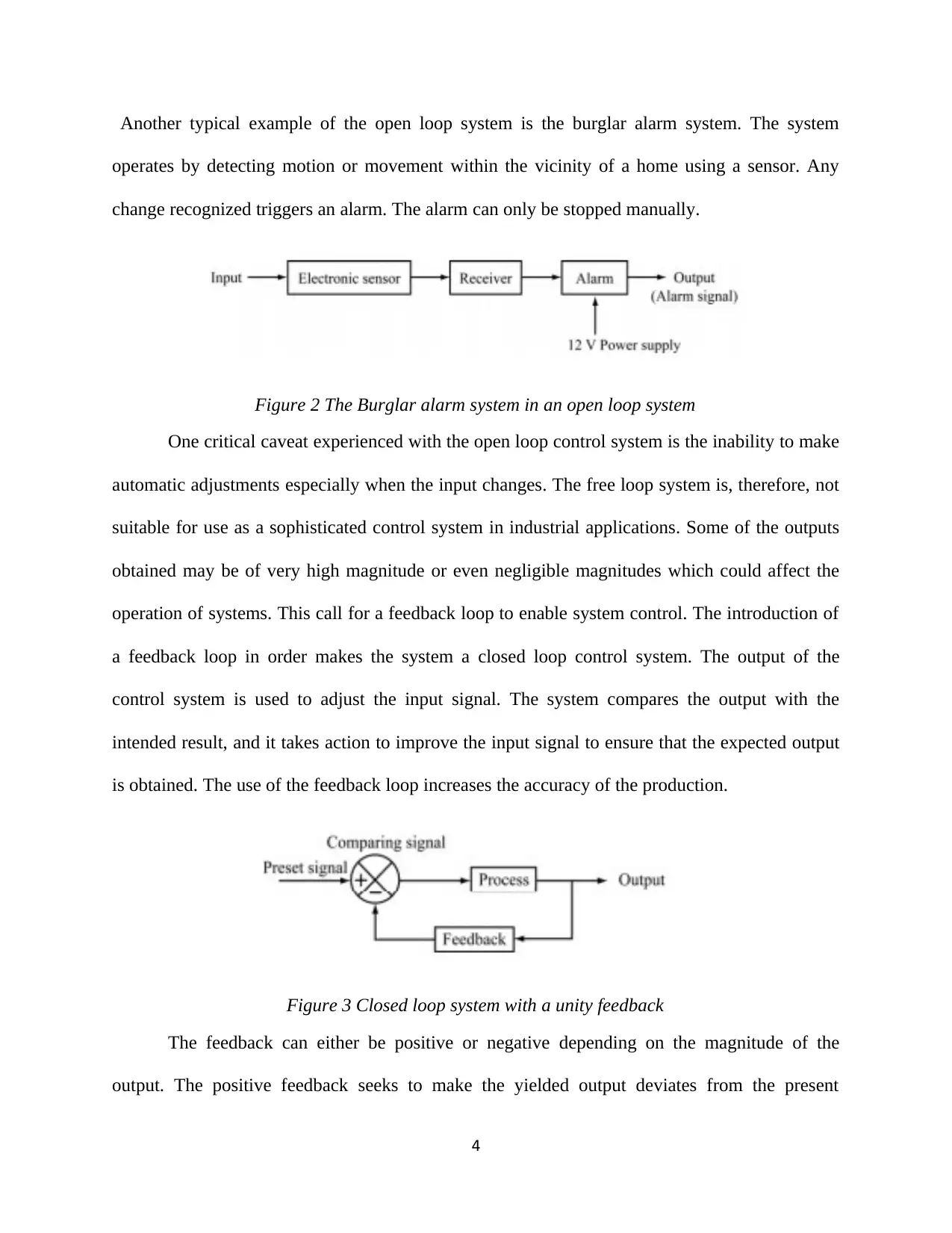
Another typical example of the open loop system is the burglar alarm system. The system
operates by detecting motion or movement within the vicinity of a home using a sensor. Any
change recognized triggers an alarm. The alarm can only be stopped manually.
Figure 2 The Burglar alarm system in an open loop system
One critical caveat experienced with the open loop control system is the inability to make
automatic adjustments especially when the input changes. The free loop system is, therefore, not
suitable for use as a sophisticated control system in industrial applications. Some of the outputs
obtained may be of very high magnitude or even negligible magnitudes which could affect the
operation of systems. This call for a feedback loop to enable system control. The introduction of
a feedback loop in order makes the system a closed loop control system. The output of the
control system is used to adjust the input signal. The system compares the output with the
intended result, and it takes action to improve the input signal to ensure that the expected output
is obtained. The use of the feedback loop increases the accuracy of the production.
Figure 3 Closed loop system with a unity feedback
The feedback can either be positive or negative depending on the magnitude of the
output. The positive feedback seeks to make the yielded output deviates from the present
4
operates by detecting motion or movement within the vicinity of a home using a sensor. Any
change recognized triggers an alarm. The alarm can only be stopped manually.
Figure 2 The Burglar alarm system in an open loop system
One critical caveat experienced with the open loop control system is the inability to make
automatic adjustments especially when the input changes. The free loop system is, therefore, not
suitable for use as a sophisticated control system in industrial applications. Some of the outputs
obtained may be of very high magnitude or even negligible magnitudes which could affect the
operation of systems. This call for a feedback loop to enable system control. The introduction of
a feedback loop in order makes the system a closed loop control system. The output of the
control system is used to adjust the input signal. The system compares the output with the
intended result, and it takes action to improve the input signal to ensure that the expected output
is obtained. The use of the feedback loop increases the accuracy of the production.
Figure 3 Closed loop system with a unity feedback
The feedback can either be positive or negative depending on the magnitude of the
output. The positive feedback seeks to make the yielded output deviates from the present
4
command status while the negative feedback causes the new production to move closer towards
the current command status (Gu, et al., 2013). For instance, when an amplifier is put close to the
microphone, the input volume kept increasing hence the interference increased causing a lot of
noise pollution. The feedback loop may require the input reduced by moving the mic away from
the amplifier. The modern industrial applications have embraced the closed-loop control systems
as they need automation of the arrangements. Some of the conventional closed-loop system
applications are air conditioners, refrigerators, automatic rice cookers, electronic ticketing
machines. Due to the complexity of the systems, they are more expensive and complicated to
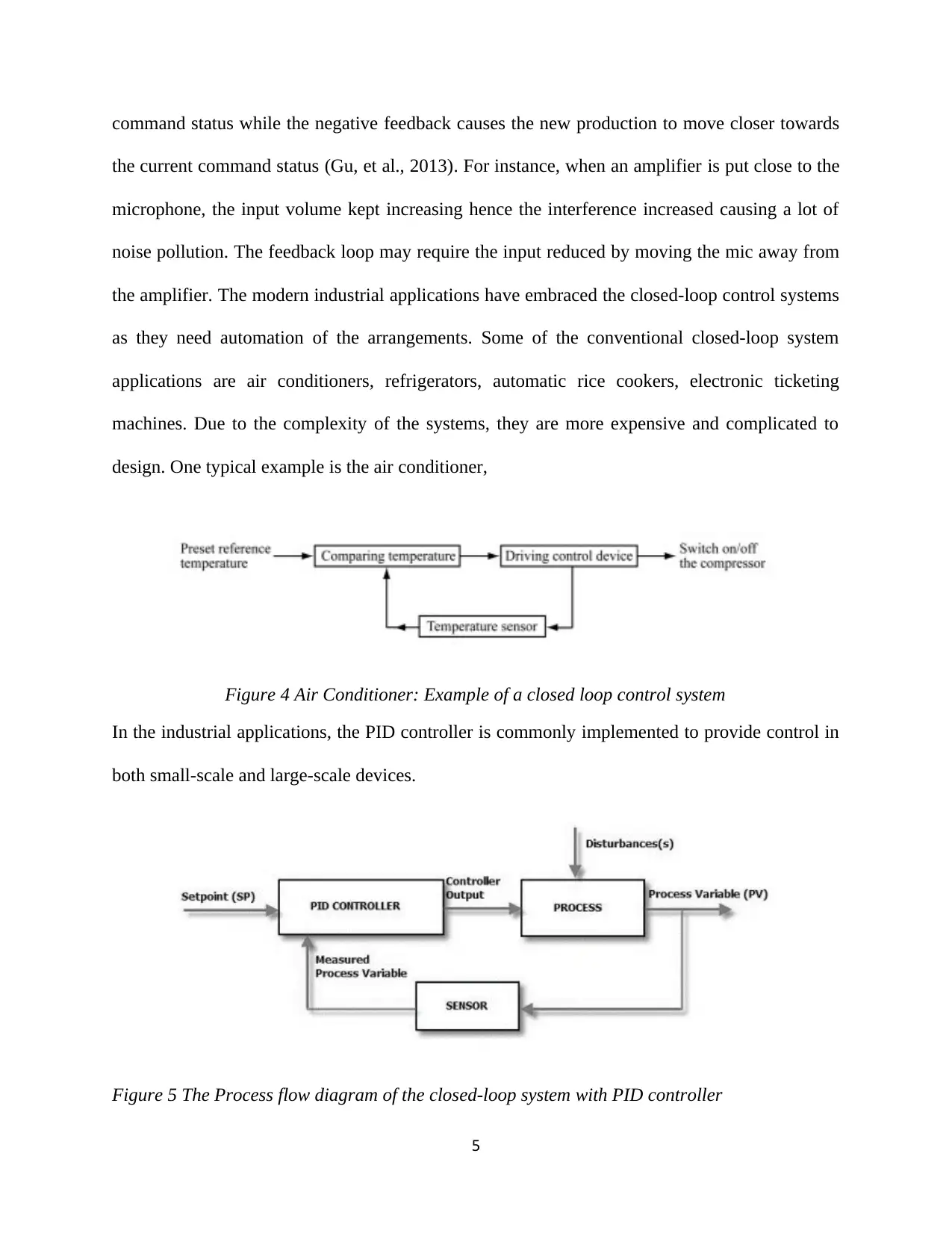
design. One typical example is the air conditioner,
Figure 4 Air Conditioner: Example of a closed loop control system
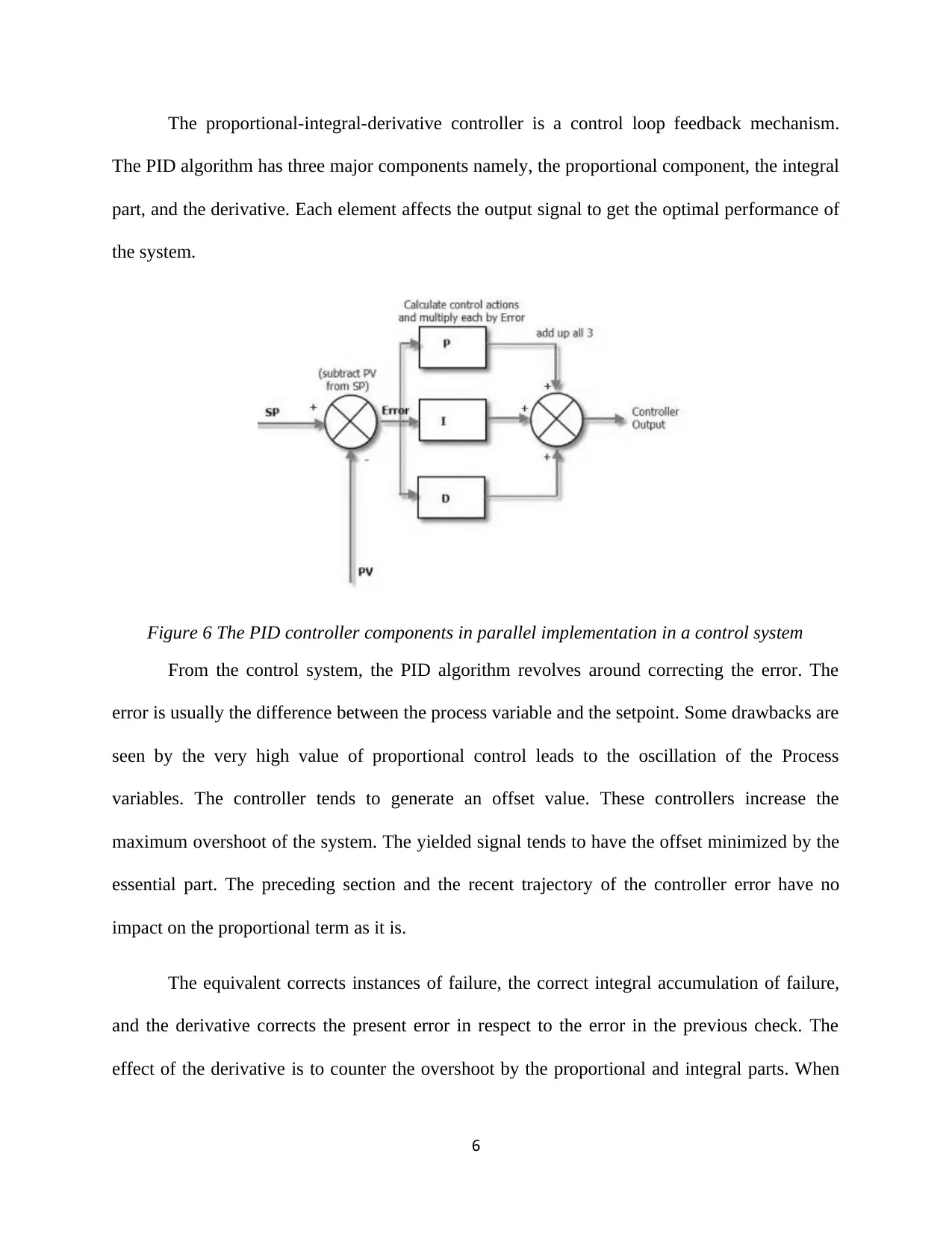
In the industrial applications, the PID controller is commonly implemented to provide control in
both small-scale and large-scale devices.
Figure 5 The Process flow diagram of the closed-loop system with PID controller
5
the current command status (Gu, et al., 2013). For instance, when an amplifier is put close to the
microphone, the input volume kept increasing hence the interference increased causing a lot of
noise pollution. The feedback loop may require the input reduced by moving the mic away from
the amplifier. The modern industrial applications have embraced the closed-loop control systems
as they need automation of the arrangements. Some of the conventional closed-loop system
applications are air conditioners, refrigerators, automatic rice cookers, electronic ticketing
machines. Due to the complexity of the systems, they are more expensive and complicated to
design. One typical example is the air conditioner,
Figure 4 Air Conditioner: Example of a closed loop control system
In the industrial applications, the PID controller is commonly implemented to provide control in
both small-scale and large-scale devices.
Figure 5 The Process flow diagram of the closed-loop system with PID controller
5
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
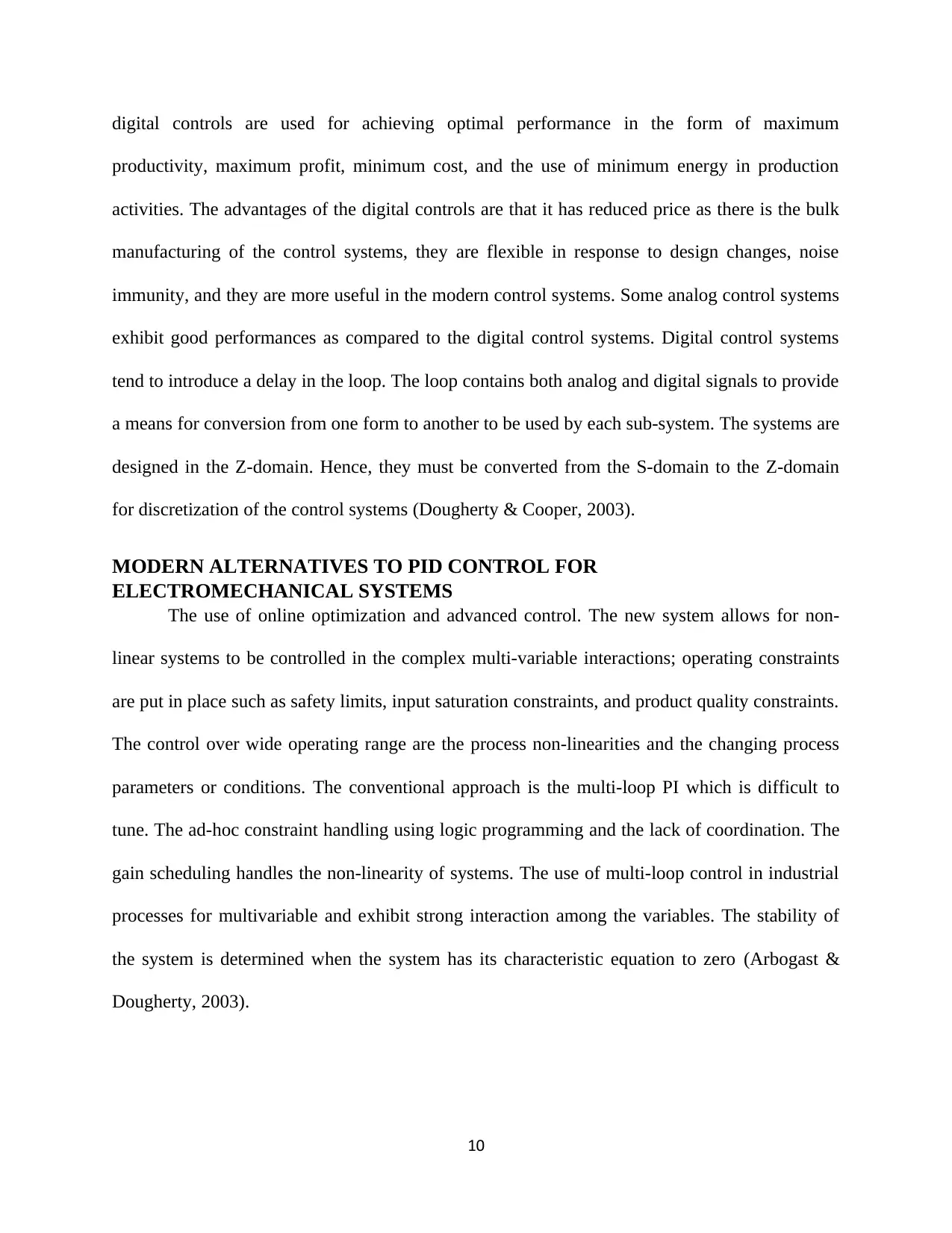
The proportional-integral-derivative controller is a control loop feedback mechanism.
The PID algorithm has three major components namely, the proportional component, the integral
part, and the derivative. Each element affects the output signal to get the optimal performance of
the system.
Figure 6 The PID controller components in parallel implementation in a control system
From the control system, the PID algorithm revolves around correcting the error. The
error is usually the difference between the process variable and the setpoint. Some drawbacks are
seen by the very high value of proportional control leads to the oscillation of the Process
variables. The controller tends to generate an offset value. These controllers increase the
maximum overshoot of the system. The yielded signal tends to have the offset minimized by the
essential part. The preceding section and the recent trajectory of the controller error have no
impact on the proportional term as it is.
The equivalent corrects instances of failure, the correct integral accumulation of failure,
and the derivative corrects the present error in respect to the error in the previous check. The
effect of the derivative is to counter the overshoot by the proportional and integral parts. When
6
The PID algorithm has three major components namely, the proportional component, the integral
part, and the derivative. Each element affects the output signal to get the optimal performance of
the system.
Figure 6 The PID controller components in parallel implementation in a control system
From the control system, the PID algorithm revolves around correcting the error. The
error is usually the difference between the process variable and the setpoint. Some drawbacks are
seen by the very high value of proportional control leads to the oscillation of the Process
variables. The controller tends to generate an offset value. These controllers increase the
maximum overshoot of the system. The yielded signal tends to have the offset minimized by the
essential part. The preceding section and the recent trajectory of the controller error have no
impact on the proportional term as it is.
The equivalent corrects instances of failure, the correct integral accumulation of failure,
and the derivative corrects the present error in respect to the error in the previous check. The
effect of the derivative is to counter the overshoot by the proportional and integral parts. When
6
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

the error is significant, the two coefficients affect the controller yield. The controller response
will imply a change in the error as fast as possible hence the need for a secondary function.
THEORY OF PID CONTROL
The algorithm of a PID controller is given as,
Unfortunately, further increase in the constant proportional causes a tendency to
oscillation. The effect of adding the integral component is that the strength of the integral action
increases with a decrease in integral time. The integral component deals with the steady state
error. The PI controller encounters oscillations, and the introduction of the second component
causes damping to increase. The damping of oscillations increases with increase in the derivative
time but decreases again when the derivative time becomes too large. The proportional response
is given as,
The proportional constant used need not be very high as it may result in the system
instability. Similarly, when the proportional gain is too low, the control action may tend to be
negligible hence fails to respond actively to the system disturbances. The proportional controller
has the effect of minimizing the rise time, and it may reduce the steady-state error but not
eliminate it. The commonly used value is such that the proportional band is expressed as a
percentage,
7
will imply a change in the error as fast as possible hence the need for a secondary function.
THEORY OF PID CONTROL
The algorithm of a PID controller is given as,
Unfortunately, further increase in the constant proportional causes a tendency to
oscillation. The effect of adding the integral component is that the strength of the integral action
increases with a decrease in integral time. The integral component deals with the steady state
error. The PI controller encounters oscillations, and the introduction of the second component
causes damping to increase. The damping of oscillations increases with increase in the derivative
time but decreases again when the derivative time becomes too large. The proportional response
is given as,
The proportional constant used need not be very high as it may result in the system
instability. Similarly, when the proportional gain is too low, the control action may tend to be
negligible hence fails to respond actively to the system disturbances. The proportional controller
has the effect of minimizing the rise time, and it may reduce the steady-state error but not
eliminate it. The commonly used value is such that the proportional band is expressed as a
percentage,
7

The integral controller has an impact on the magnitude of the error as well as the duration
of the failure. The fundamental is the sum of the instantaneous mistakes over a period. The
essential component eliminates the steady-state error, but it introduces the transient response and
worsens it. The comprehensive control is given as,
The secondary component is obtained by determining the slope of the error over a given
period and multiplying the value with the gain factor. The controller slows the rate of change of
the controller output. The controller has the effect of increasing the stability of the system, it
reduces the overshoot of the yielded output, and improves the transient response. It is given as,
The exact nonlinear dynamics of a humanoid with the constraint is derived as shown in the
equations below,
ω ( t ) =Ω
In the steady state,
Ra Ia+kb Ω=V s
T =k τ I a
8
of the failure. The fundamental is the sum of the instantaneous mistakes over a period. The
essential component eliminates the steady-state error, but it introduces the transient response and
worsens it. The comprehensive control is given as,
The secondary component is obtained by determining the slope of the error over a given
period and multiplying the value with the gain factor. The controller slows the rate of change of
the controller output. The controller has the effect of increasing the stability of the system, it
reduces the overshoot of the yielded output, and improves the transient response. It is given as,
The exact nonlinear dynamics of a humanoid with the constraint is derived as shown in the
equations below,
ω ( t ) =Ω
In the steady state,
Ra Ia+kb Ω=V s
T =k τ I a
8
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide

There is a relationship observed between the input power, the external power, and the power
consumed through the resistor when the law of conservation of power is implemented such that,
I a V s=T Ω
Ra Ia
2=Resistance
V s Ia=T Ω+ Ra Ia
2
T =k b I a
V s ( t )=Ra ia (t ) + La∗d ia ( t )
dt +V b (t )
T M ( t ) =k ia ( t )
k =kT =k b
TECHNOLOGY AND STATE OF THE ART PID CONTROL
The linear system is linear if the output of the scaled sum of two input signals is the
equivalent scaled sum of outputs. The system is time-invariant if the system output is the same
and given the same input signal regardless of time. The system can be tuned using the different
tuning methods available. A new approach to the control of the electric drives with permanent
magnet synchronous motors, based on feedback linearization has been developed and
experimentally proven. Three various prescribed dynamics to speed demands were achieved.
The sampled data signal is a discrete time signal resulting from sampling a continuous
time signal. The digital signal is obtained by two processes of sampling and quantizing. The
9
consumed through the resistor when the law of conservation of power is implemented such that,
I a V s=T Ω
Ra Ia
2=Resistance
V s Ia=T Ω+ Ra Ia
2
T =k b I a
V s ( t )=Ra ia (t ) + La∗d ia ( t )
dt +V b (t )
T M ( t ) =k ia ( t )
k =kT =k b
TECHNOLOGY AND STATE OF THE ART PID CONTROL
The linear system is linear if the output of the scaled sum of two input signals is the
equivalent scaled sum of outputs. The system is time-invariant if the system output is the same
and given the same input signal regardless of time. The system can be tuned using the different
tuning methods available. A new approach to the control of the electric drives with permanent
magnet synchronous motors, based on feedback linearization has been developed and
experimentally proven. Three various prescribed dynamics to speed demands were achieved.
The sampled data signal is a discrete time signal resulting from sampling a continuous
time signal. The digital signal is obtained by two processes of sampling and quantizing. The
9
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
digital controls are used for achieving optimal performance in the form of maximum
productivity, maximum profit, minimum cost, and the use of minimum energy in production
activities. The advantages of the digital controls are that it has reduced price as there is the bulk
manufacturing of the control systems, they are flexible in response to design changes, noise
immunity, and they are more useful in the modern control systems. Some analog control systems
exhibit good performances as compared to the digital control systems. Digital control systems
tend to introduce a delay in the loop. The loop contains both analog and digital signals to provide
a means for conversion from one form to another to be used by each sub-system. The systems are
designed in the Z-domain. Hence, they must be converted from the S-domain to the Z-domain
for discretization of the control systems (Dougherty & Cooper, 2003).
MODERN ALTERNATIVES TO PID CONTROL FOR
ELECTROMECHANICAL SYSTEMS
The use of online optimization and advanced control. The new system allows for non-
linear systems to be controlled in the complex multi-variable interactions; operating constraints
are put in place such as safety limits, input saturation constraints, and product quality constraints.
The control over wide operating range are the process non-linearities and the changing process
parameters or conditions. The conventional approach is the multi-loop PI which is difficult to
tune. The ad-hoc constraint handling using logic programming and the lack of coordination. The
gain scheduling handles the non-linearity of systems. The use of multi-loop control in industrial
processes for multivariable and exhibit strong interaction among the variables. The stability of
the system is determined when the system has its characteristic equation to zero (Arbogast &
Dougherty, 2003).
10
productivity, maximum profit, minimum cost, and the use of minimum energy in production
activities. The advantages of the digital controls are that it has reduced price as there is the bulk
manufacturing of the control systems, they are flexible in response to design changes, noise
immunity, and they are more useful in the modern control systems. Some analog control systems
exhibit good performances as compared to the digital control systems. Digital control systems
tend to introduce a delay in the loop. The loop contains both analog and digital signals to provide
a means for conversion from one form to another to be used by each sub-system. The systems are
designed in the Z-domain. Hence, they must be converted from the S-domain to the Z-domain
for discretization of the control systems (Dougherty & Cooper, 2003).
MODERN ALTERNATIVES TO PID CONTROL FOR
ELECTROMECHANICAL SYSTEMS
The use of online optimization and advanced control. The new system allows for non-
linear systems to be controlled in the complex multi-variable interactions; operating constraints
are put in place such as safety limits, input saturation constraints, and product quality constraints.
The control over wide operating range are the process non-linearities and the changing process
parameters or conditions. The conventional approach is the multi-loop PI which is difficult to
tune. The ad-hoc constraint handling using logic programming and the lack of coordination. The
gain scheduling handles the non-linearity of systems. The use of multi-loop control in industrial
processes for multivariable and exhibit strong interaction among the variables. The stability of
the system is determined when the system has its characteristic equation to zero (Arbogast &
Dougherty, 2003).
10
CONCLUSION
In a nutshell, many industries are interested in controlling the temperature level of their
process tanks. The feedback loop of the PID measures the actual level of the parameter under
study and compares it to the input or reference value to determine the error. The PID controller
finds application in many industries and fields where process and plants have been installed.
There are new and alternative models for the implementation of the system. The digital PID
controllers are quite easy to implement and operate as they do not require a specialist or very
highly trained person to run. Other alternatives such as the pneumatic controller are applied for
the pneumatic system control to ensure that systems are controlled cost-effectively. According to
many researchers and practical tests carried out in the industry, it is recommended that the PID
controller is utilized for processes with low to medium order plant transfer functions with small
time delays.
FUTURE PROJECTIONS ON PID CONTROL
The conventional control scheme has multiple single inputs and single output PID
controllers used for the control of plants. The consequence of loop interaction is the lack of
coordination between different PID loops. Neighboring PID loops can cooperate with each other
or end up opposing or disturbing each other. Such advanced control systems can be used to solve
the Tennessee Eastman problem. The model predictive control does multivariable control based
on the on-line use of the dynamic model. The modified form of classical optimal control problem
can systematically and optimally handle multivariable interactions, operating input and output
constraints, and process non-linearities. Another approach is the use of the data-driven models.
The development of linear state space and transfer models starting from the first principles or
gray box models is quite an abstract proposition.
11
In a nutshell, many industries are interested in controlling the temperature level of their
process tanks. The feedback loop of the PID measures the actual level of the parameter under
study and compares it to the input or reference value to determine the error. The PID controller
finds application in many industries and fields where process and plants have been installed.
There are new and alternative models for the implementation of the system. The digital PID
controllers are quite easy to implement and operate as they do not require a specialist or very
highly trained person to run. Other alternatives such as the pneumatic controller are applied for
the pneumatic system control to ensure that systems are controlled cost-effectively. According to
many researchers and practical tests carried out in the industry, it is recommended that the PID
controller is utilized for processes with low to medium order plant transfer functions with small
time delays.
FUTURE PROJECTIONS ON PID CONTROL
The conventional control scheme has multiple single inputs and single output PID
controllers used for the control of plants. The consequence of loop interaction is the lack of
coordination between different PID loops. Neighboring PID loops can cooperate with each other
or end up opposing or disturbing each other. Such advanced control systems can be used to solve
the Tennessee Eastman problem. The model predictive control does multivariable control based
on the on-line use of the dynamic model. The modified form of classical optimal control problem
can systematically and optimally handle multivariable interactions, operating input and output
constraints, and process non-linearities. Another approach is the use of the data-driven models.
The development of linear state space and transfer models starting from the first principles or
gray box models is quite an abstract proposition.
11
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 36
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.