Control Systems Assignment Solution: Stability and Controller Design
VerifiedAdded on 2023/03/31
|30
|3996
|339
Homework Assignment
AI Summary
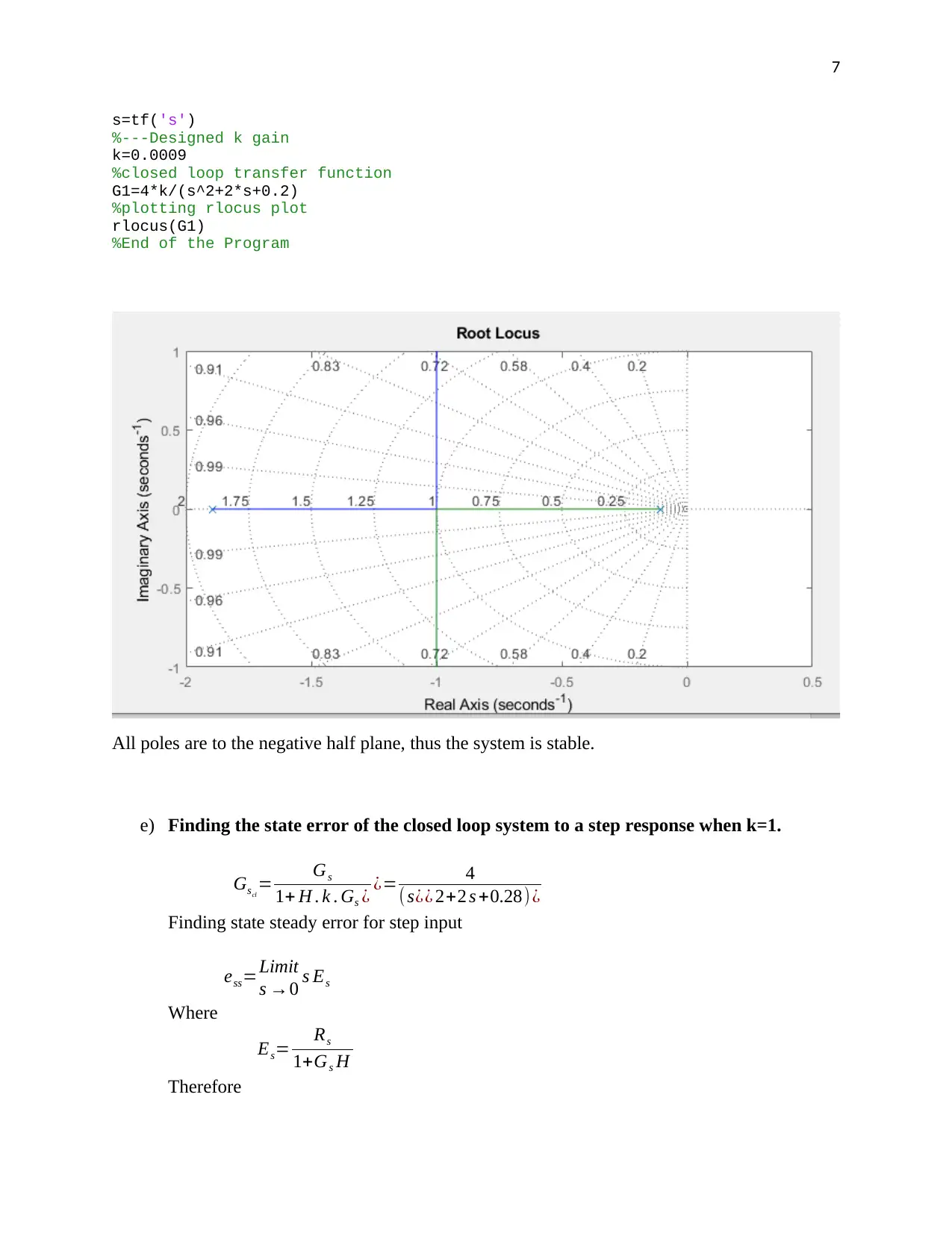
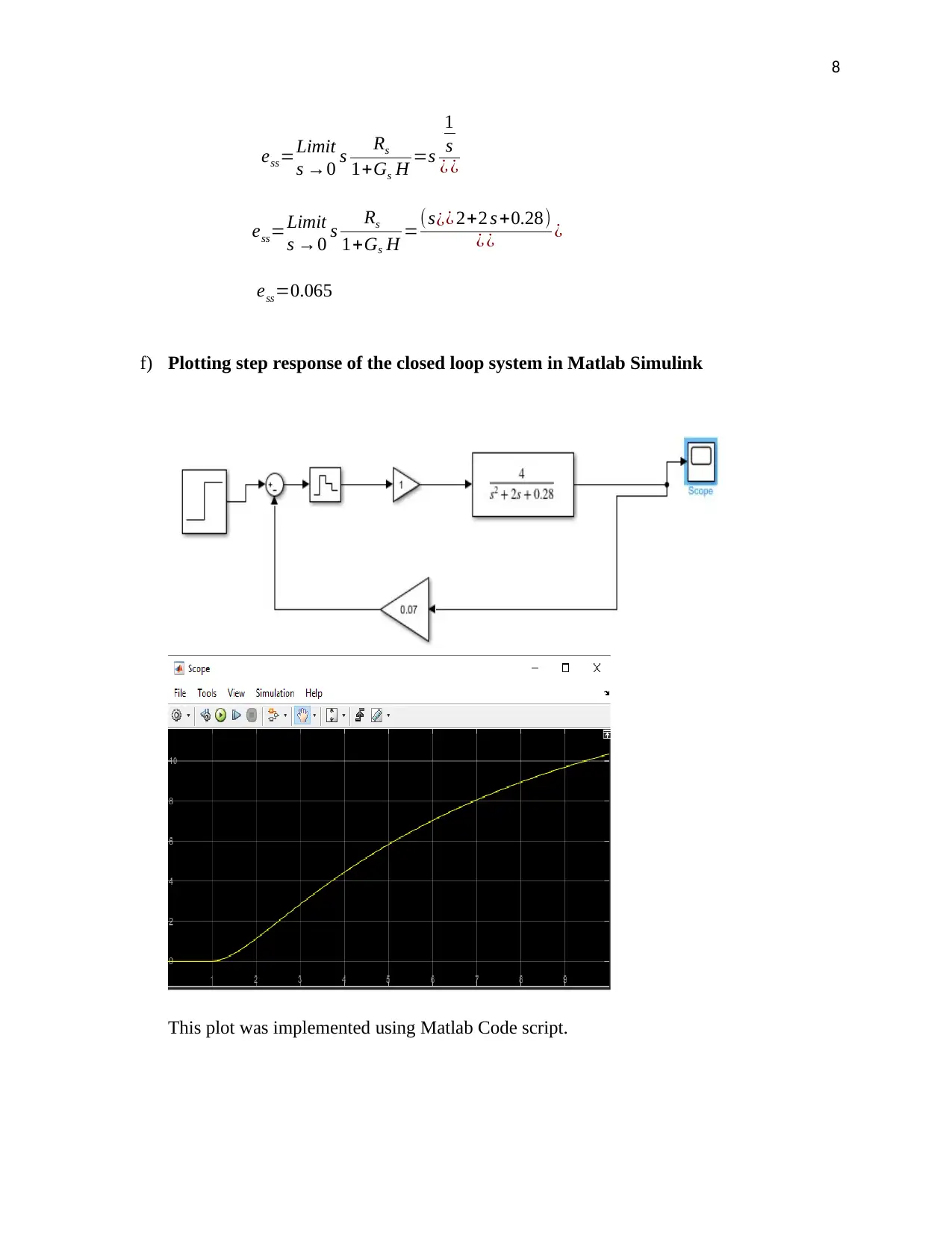
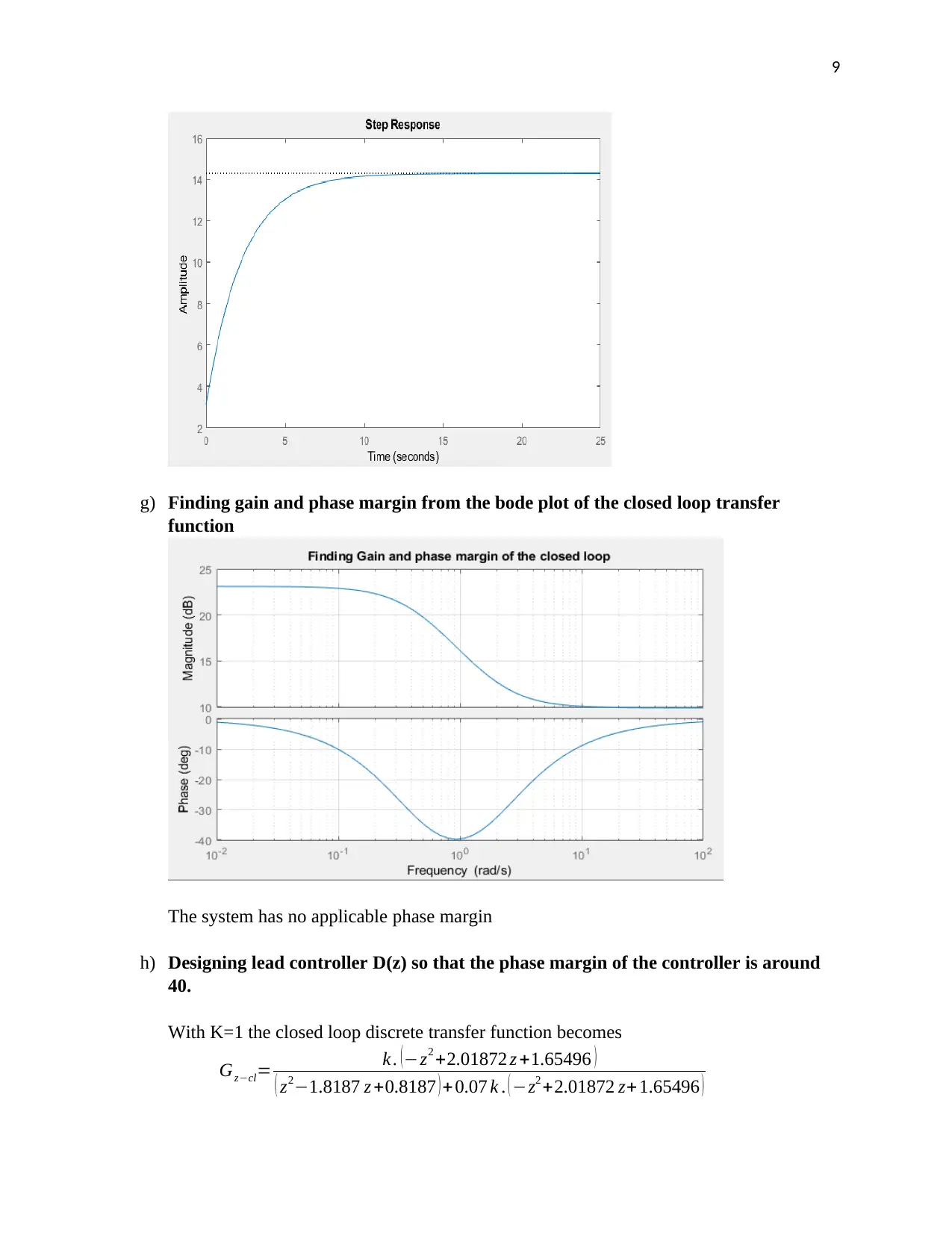
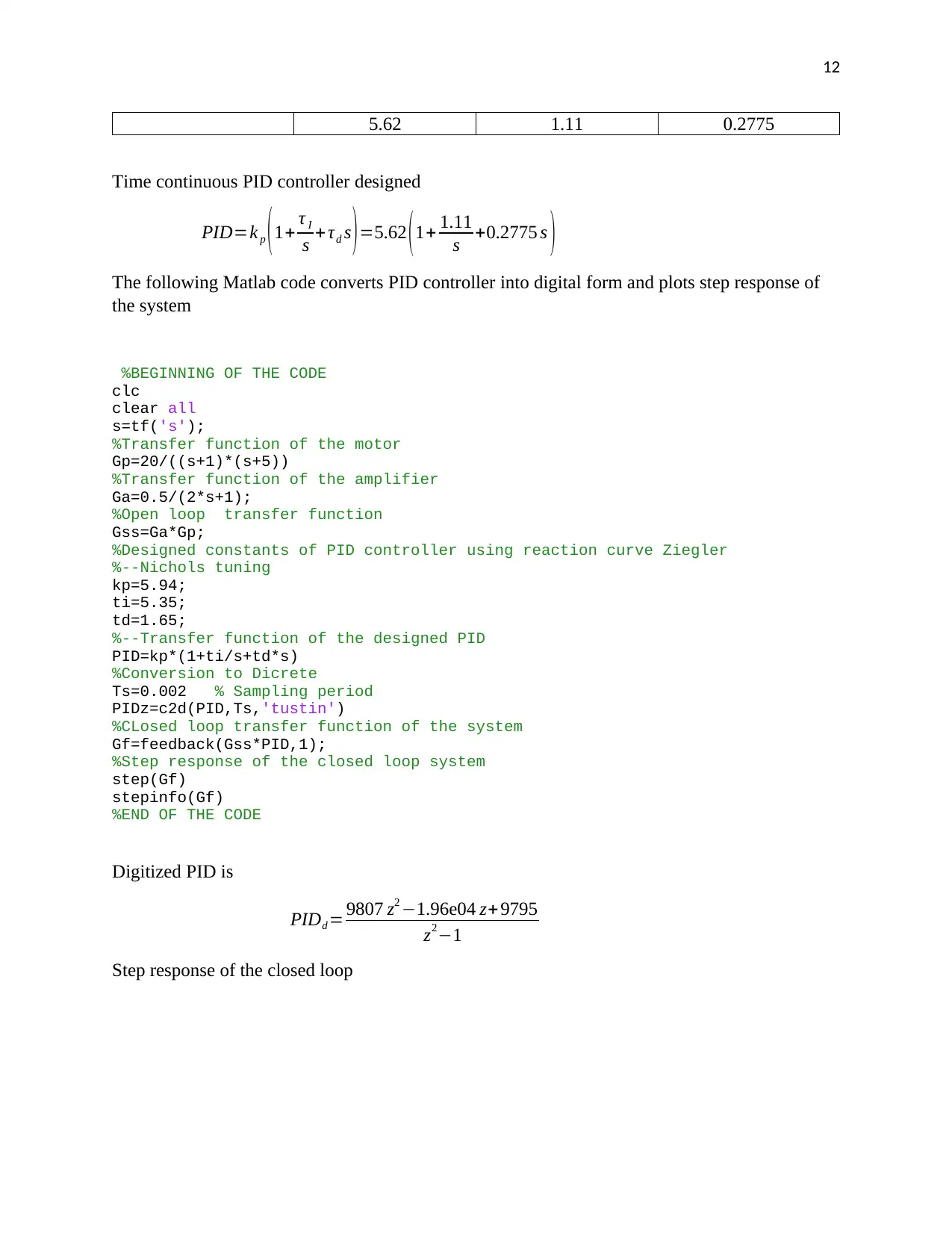
This document presents a detailed solution to a control systems assignment, encompassing several key aspects of control theory. The solution begins with an analysis of a robot arm control system, including the derivation of the closed-loop system characteristic equation and stability analysis using the Jury test. It then explores stability using the Nyquist and root locus methods, determining the range of gain (k) for stability. The assignment also covers the calculation of the steady-state error for a step response and the plotting of the closed-loop system's step response using Matlab. Furthermore, the solution includes the design of a lead controller to achieve a desired phase margin and the design of PID controllers using both the reaction curve and instability methods of Ziegler-Nichols tuning. The PID controllers are then discretized using backward and forward methods, and their step responses are compared to the continuous-time controllers. The analysis also includes the determination of gain and phase margins from the Bode plot of the closed-loop transfer function. The document provides Matlab code and Simulink diagrams to support the analysis and design processes, offering a comprehensive understanding of the concepts involved.




1 out of 30
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.