University Project: ETEN6000 Control Systems Design and Analysis
VerifiedAdded on 2021/06/17
|10
|1438
|23
Project
AI Summary
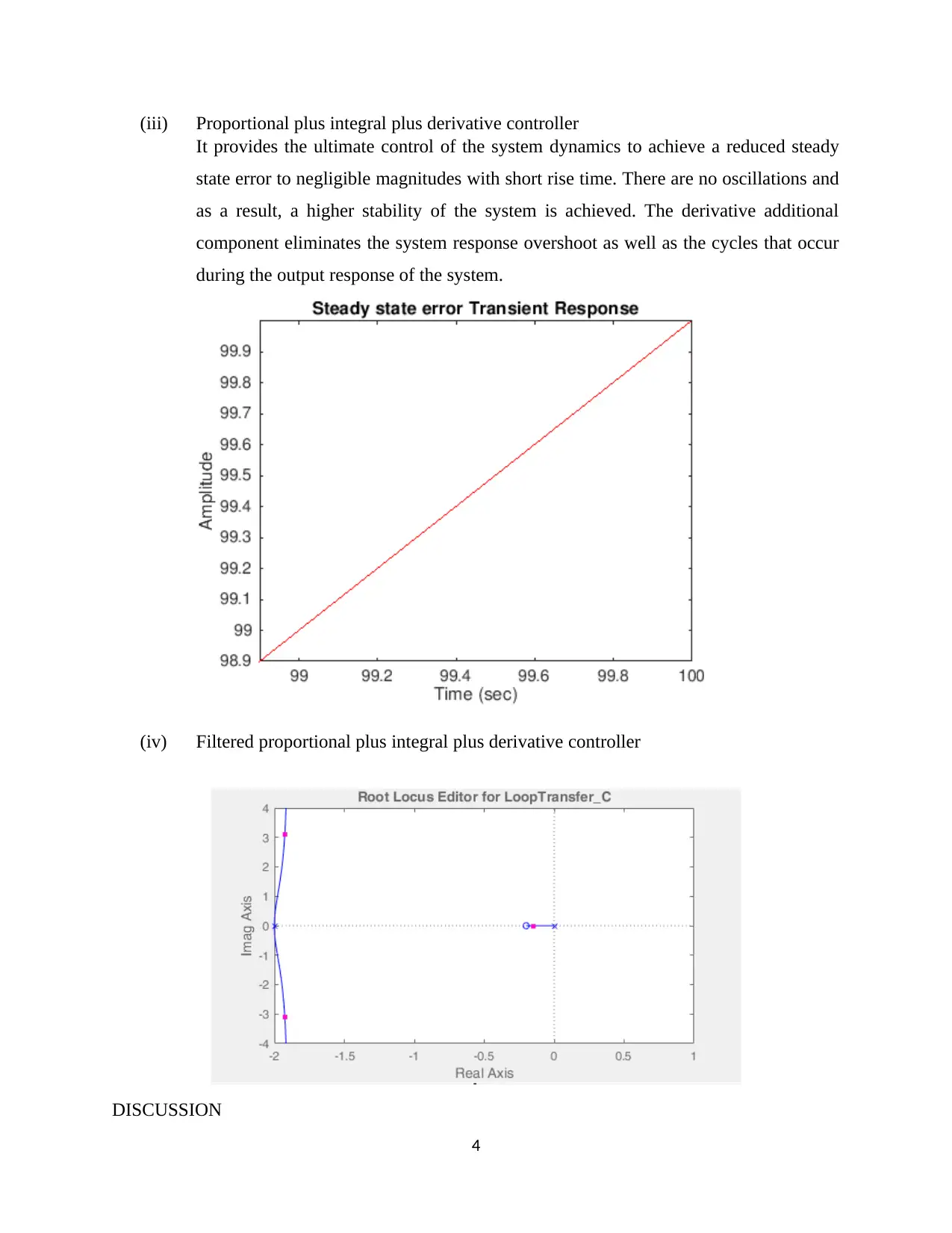
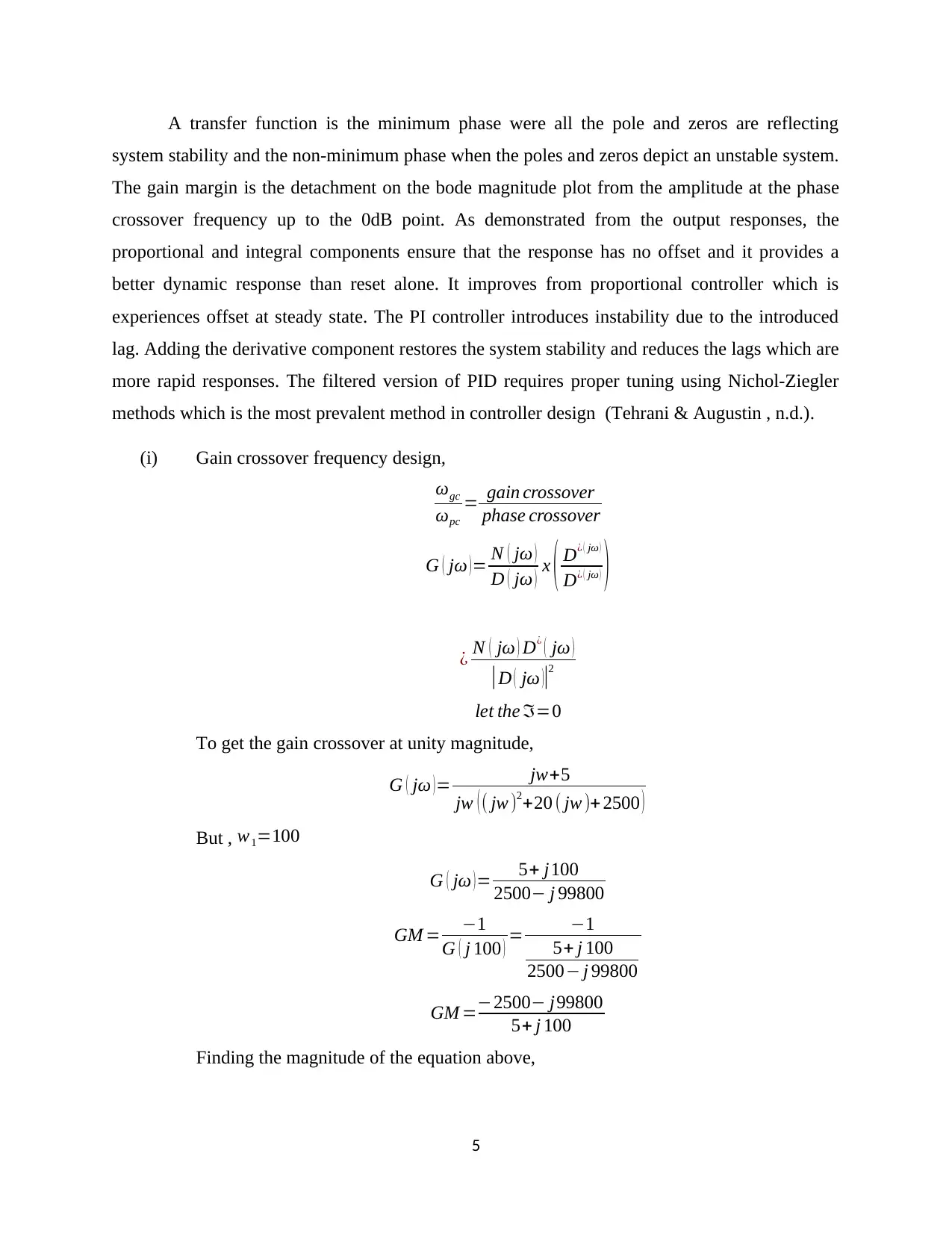
This project report focuses on the design and analysis of control systems, specifically addressing the application of proportional, integral, and derivative (PID) controllers. The project begins with an introduction to control systems, highlighting their importance in industrial applications and the use of feedback loops to achieve desired outputs. The report then outlines the design specifications, including gain crossover frequency, steady-state error, and phase margin. The core of the project involves the analysis of proportional, proportional-integral (PI), and proportional-integral-derivative (PID) controllers, including their effects on system stability, steady-state error, and transient response. The report discusses the merits and limitations of each controller type, including their impact on signal rise time, overshoot, and noise sensitivity. The design process includes mathematical derivations, bode plots, and simulations using MATLAB to meet the design criteria. The project concludes with a discussion of the results, comparing the performance of different controllers and emphasizing the importance of proper tuning. The report includes MATLAB code and analysis of a ramp input response and a discussion of the transfer function, gain margin, and the implementation of PI controllers. The project aims to provide a comprehensive understanding of control system design principles and practical implementation, offering insights into improving system performance and stability.

1 out of 10
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.