EEE 303A: Comprehensive Solutions for Control Systems Test 1 Problems
VerifiedAdded on 2022/08/17
|19
|1862
|12
Homework Assignment
AI Summary
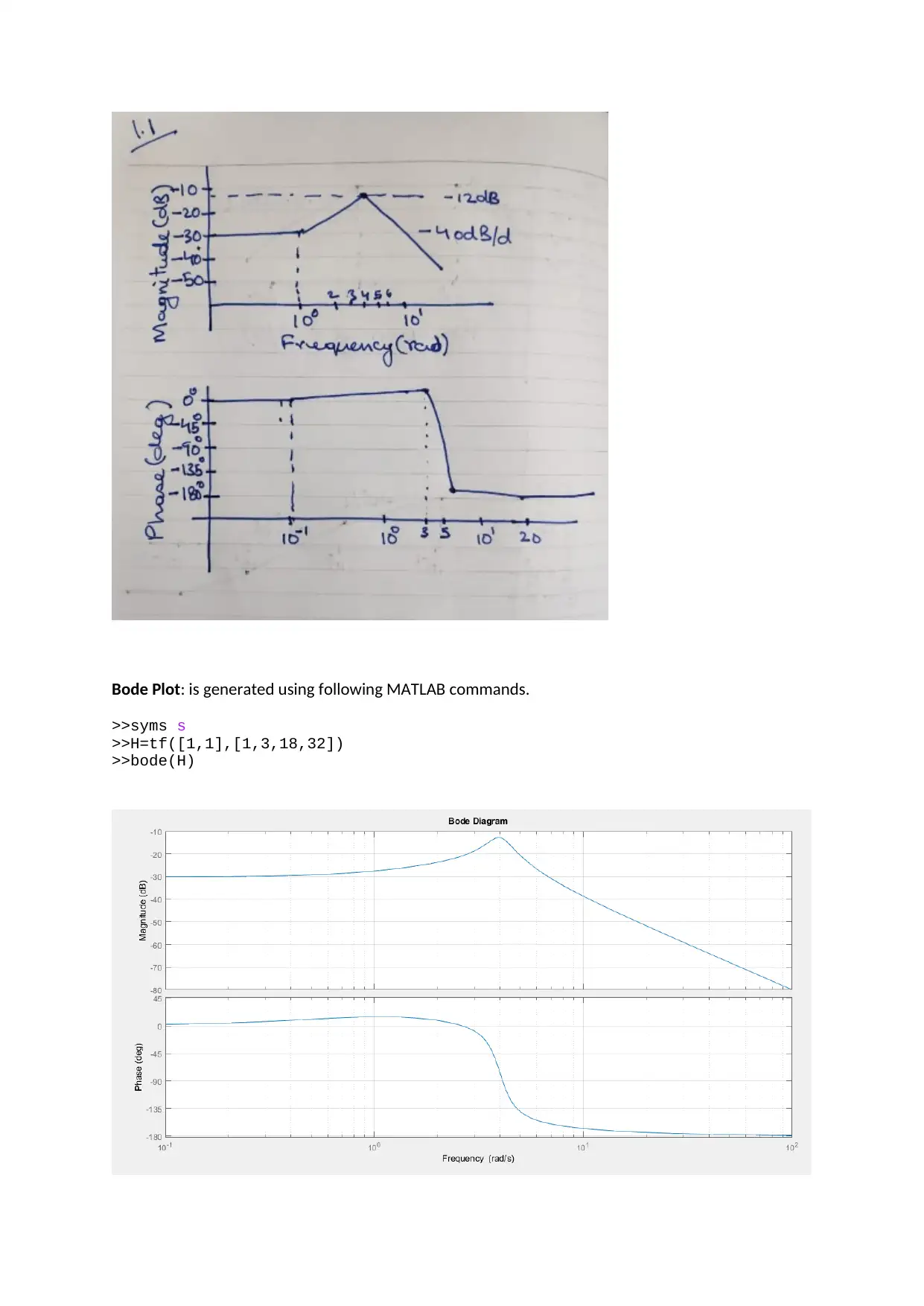
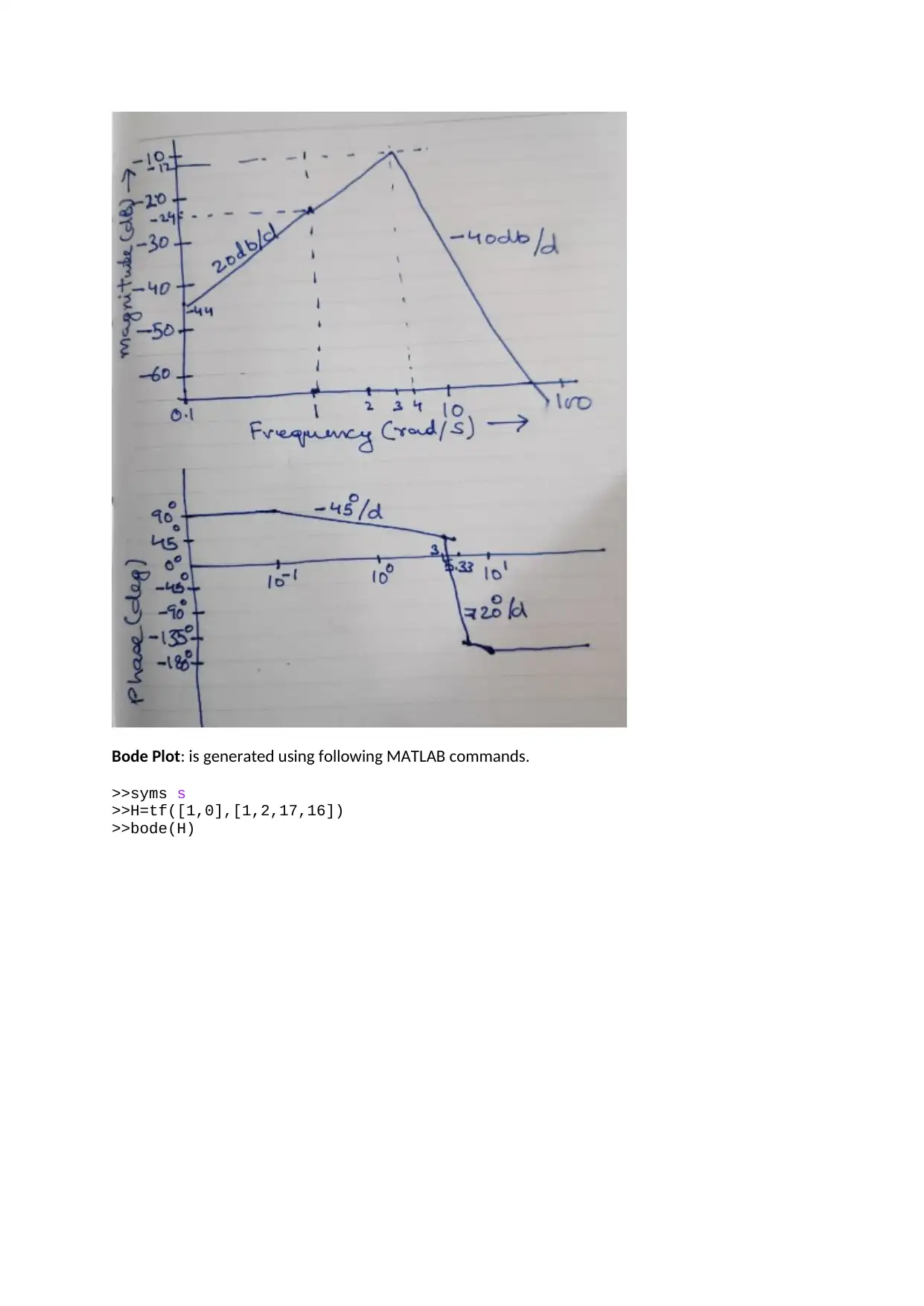
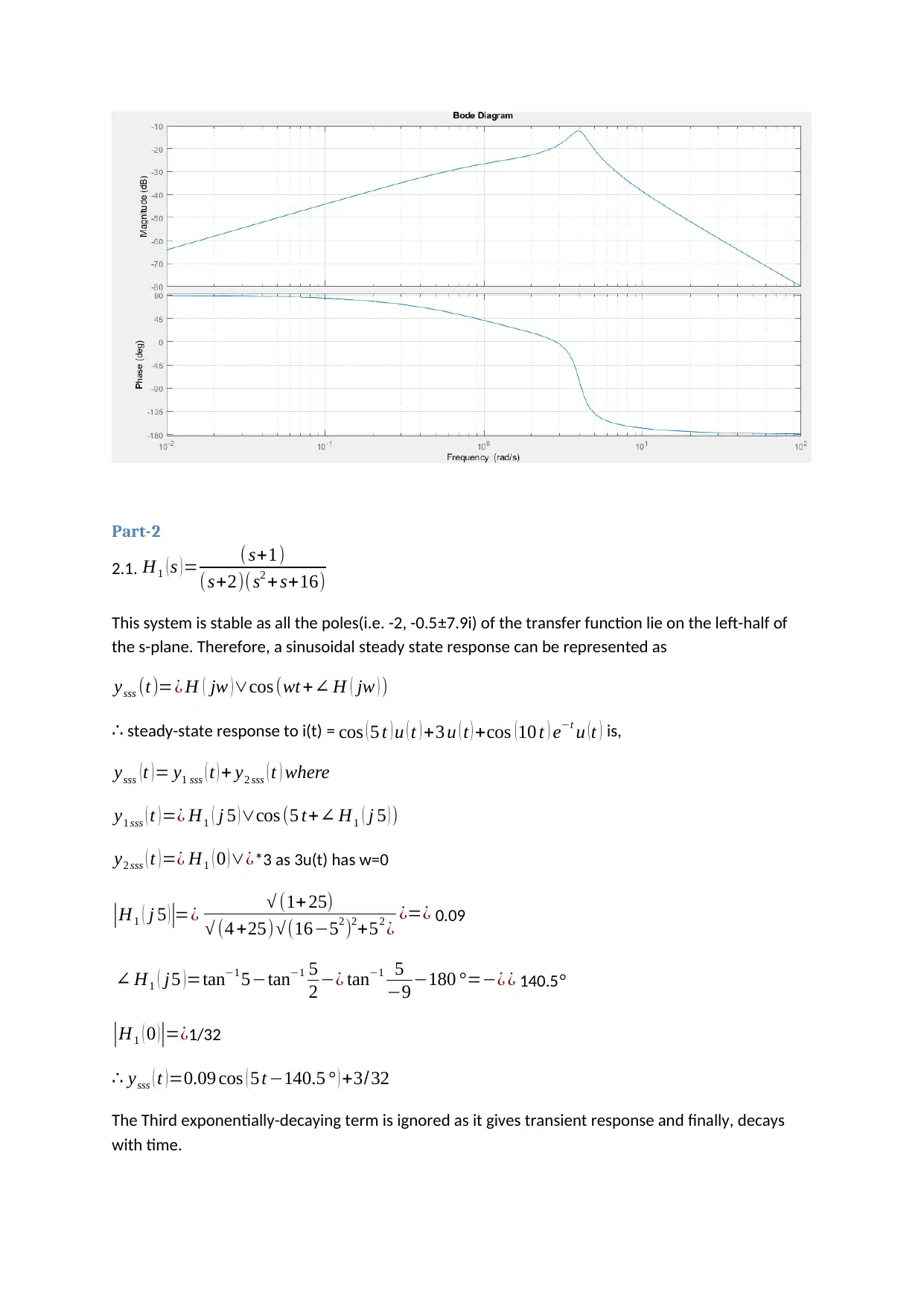
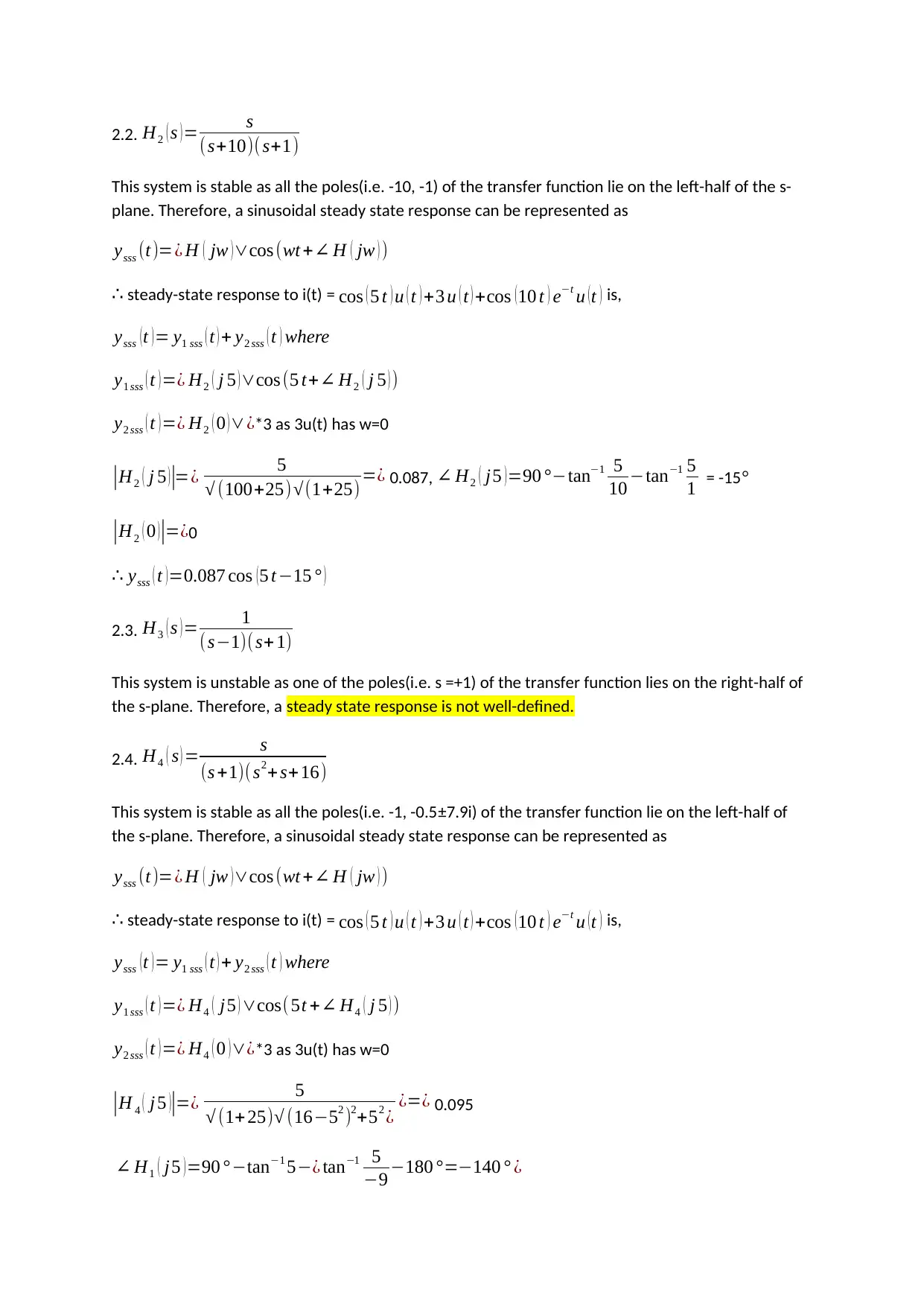
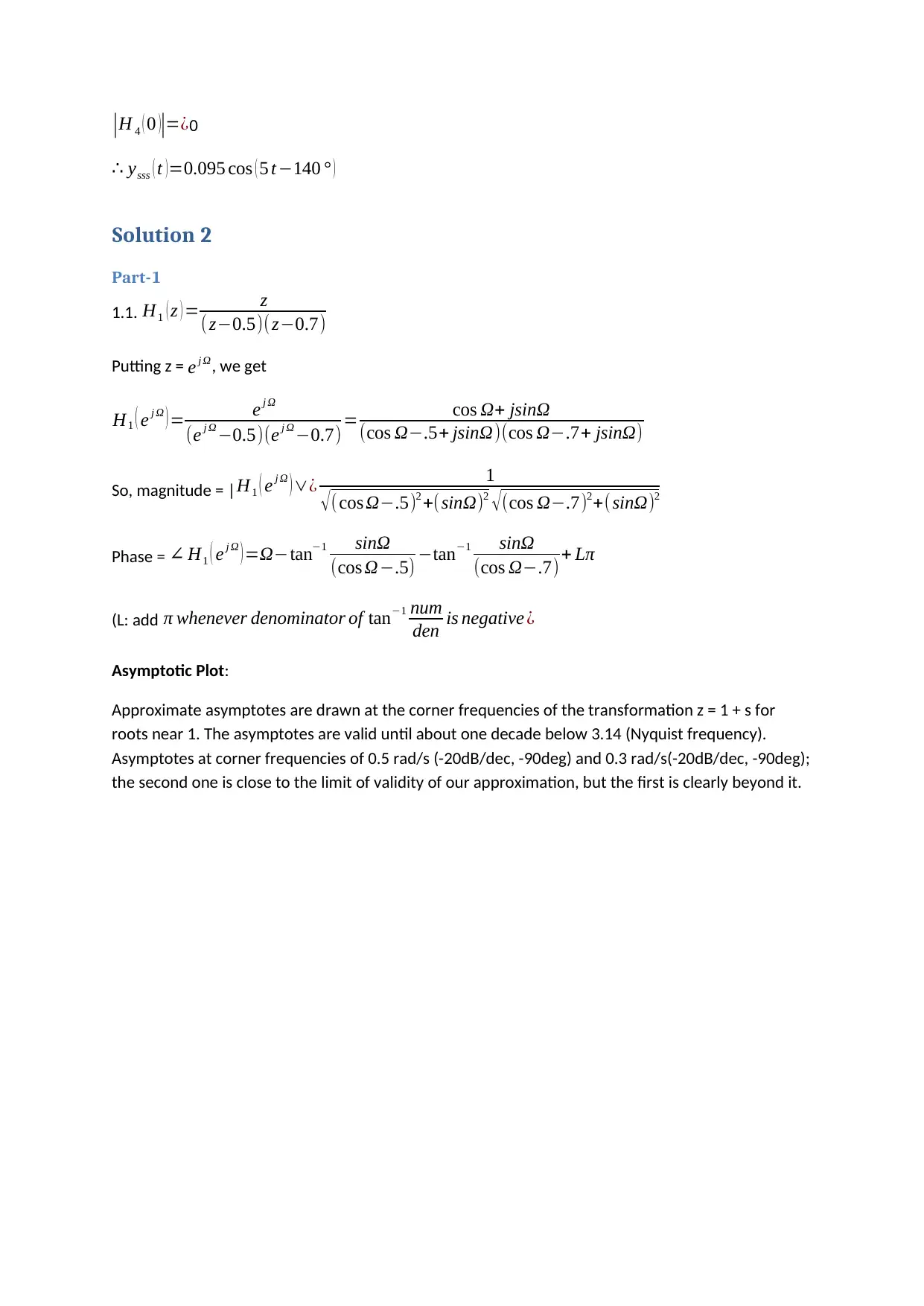
This document presents comprehensive solutions to an Electrical Engineering assignment, specifically focusing on control systems. The solutions cover various aspects, including the analysis of Continuous-Time (CT) and Discrete-Time (DT) systems. The assignment requires students to derive magnitude and phase expressions for Bode plots, sketch their asymptotes, and verify them using MATLAB. Furthermore, it involves computing the steady-state response of systems to given inputs, analyzing system stability, and designing a second-order high-pass Butterworth CT filter to remove slow drift from an AC signal. The solutions provide detailed step-by-step explanations, MATLAB code snippets, and graphical representations to aid in understanding the concepts and problem-solving techniques. The document addresses the critical aspects of control systems, providing valuable insights and practical examples for students to enhance their understanding of the subject.


1 out of 19
Related Documents




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.