CSC2404 Assignment 2: Operating System Principles and Algorithms
VerifiedAdded on 2022/11/29
|14
|1916
|122
Homework Assignment
AI Summary
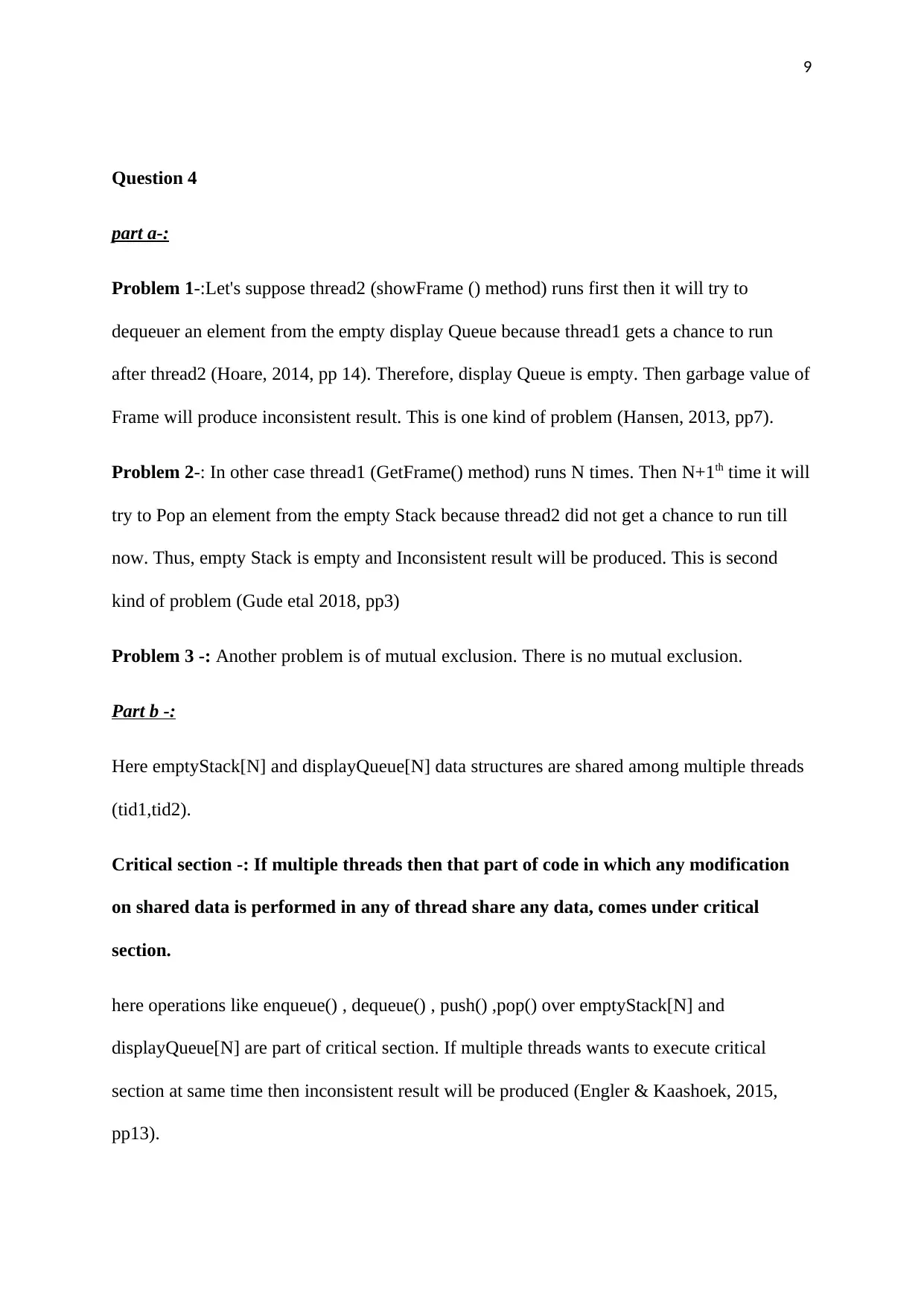
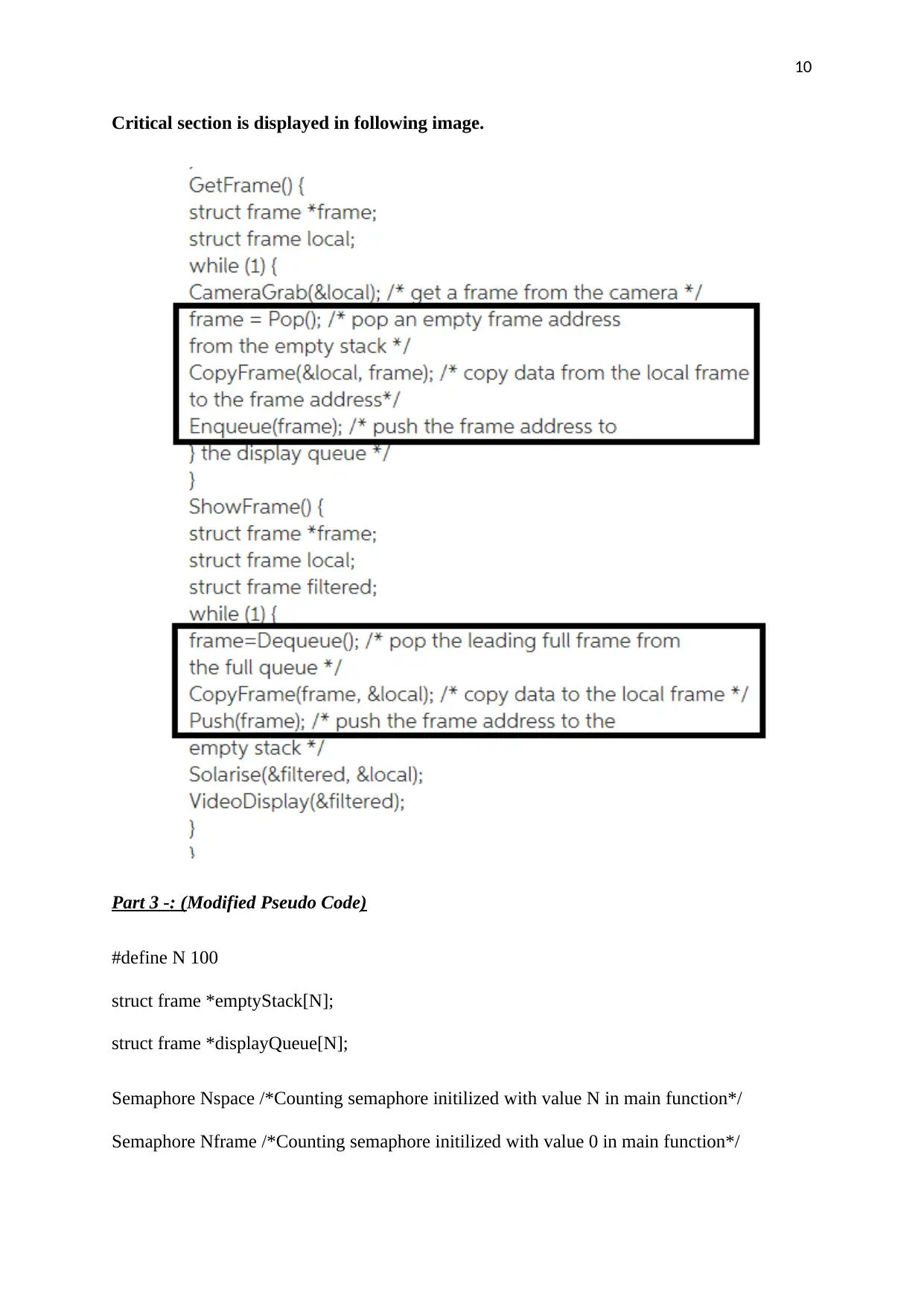
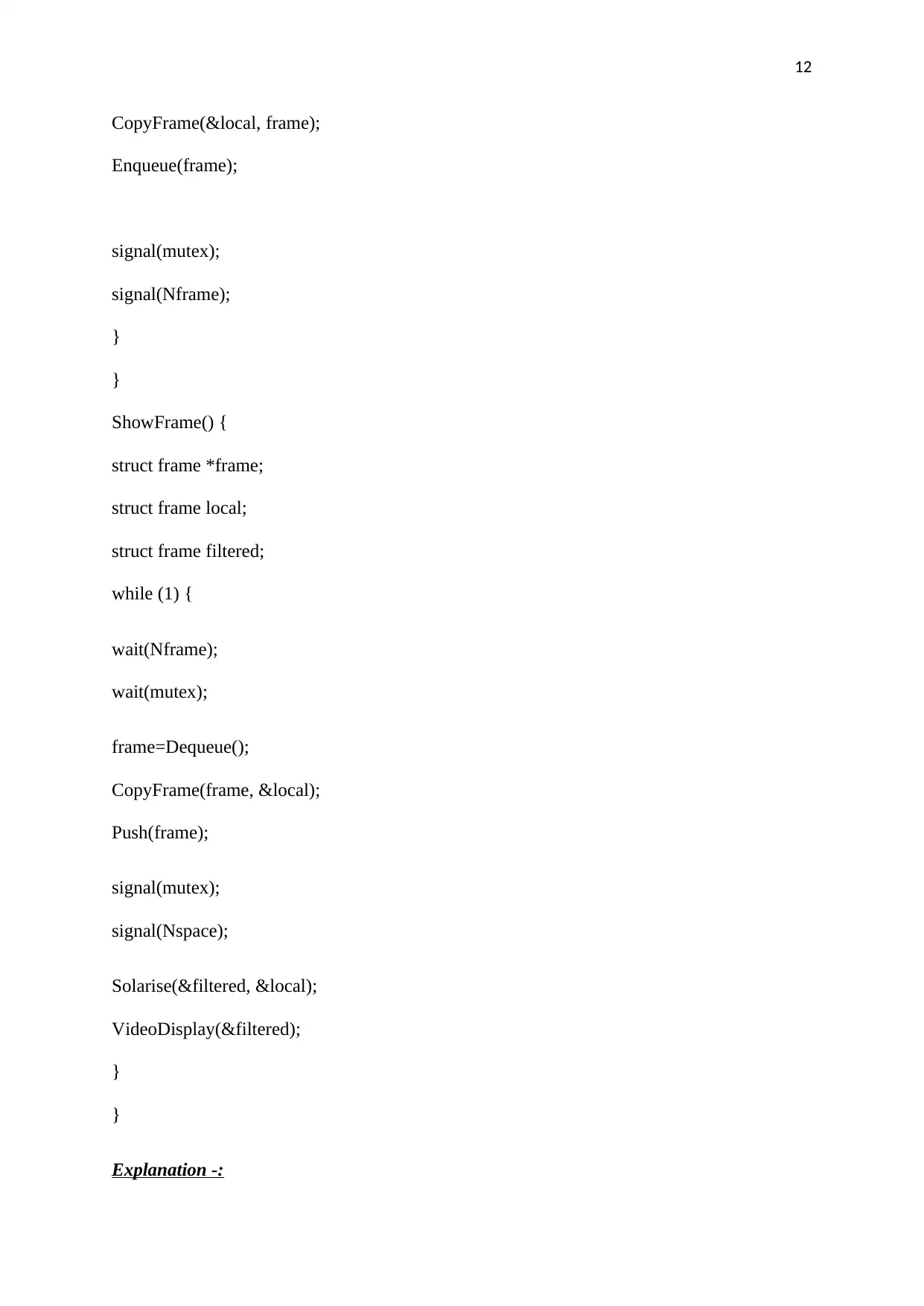
This assignment solution addresses several core concepts in operating systems. Question 1 explores memory management algorithms, comparing first-fit, worst-fit, and best-fit strategies, and then delves into paging mechanisms, including multi-level page tables and TLB performance analysis. Question 2 focuses on process synchronization using monitors and semaphores, presenting code examples for managing shared resources. Question 3 examines a traffic tunnel scenario using monitors to coordinate northbound and southbound vehicles, ensuring safe and efficient passage. Finally, Question 4 tackles concurrency issues in a multi-threaded environment, identifying problems such as race conditions and mutual exclusion, and providing a modified pseudo-code solution using semaphores to ensure data consistency and thread safety. The assignment includes detailed explanations and code snippets to illustrate the concepts.


1 out of 14


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.