Control Systems and Power Electronics: DC Motor and Inverter Analysis
VerifiedAdded on 2022/09/07
|13
|903
|35
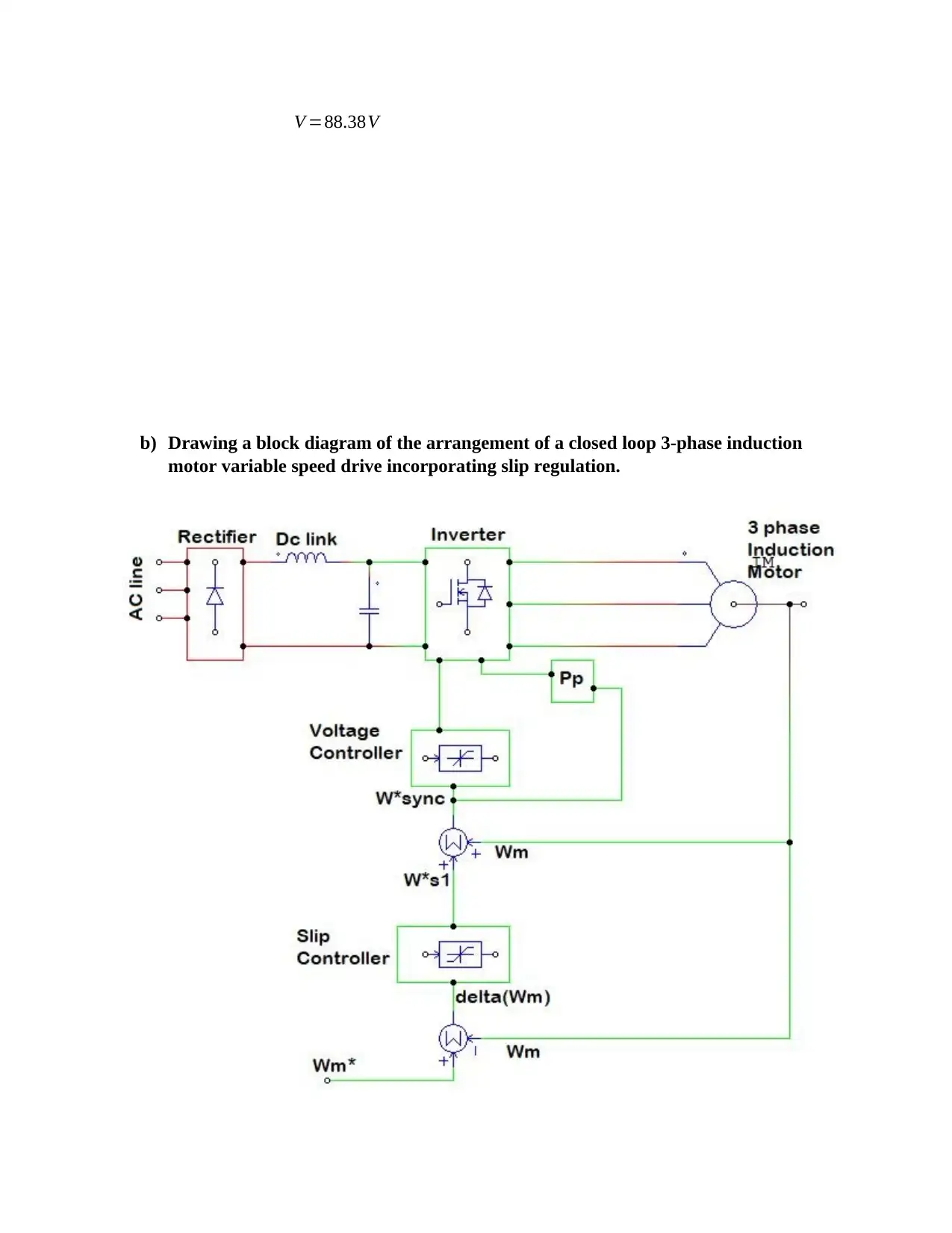
Homework Assignment
AI Summary
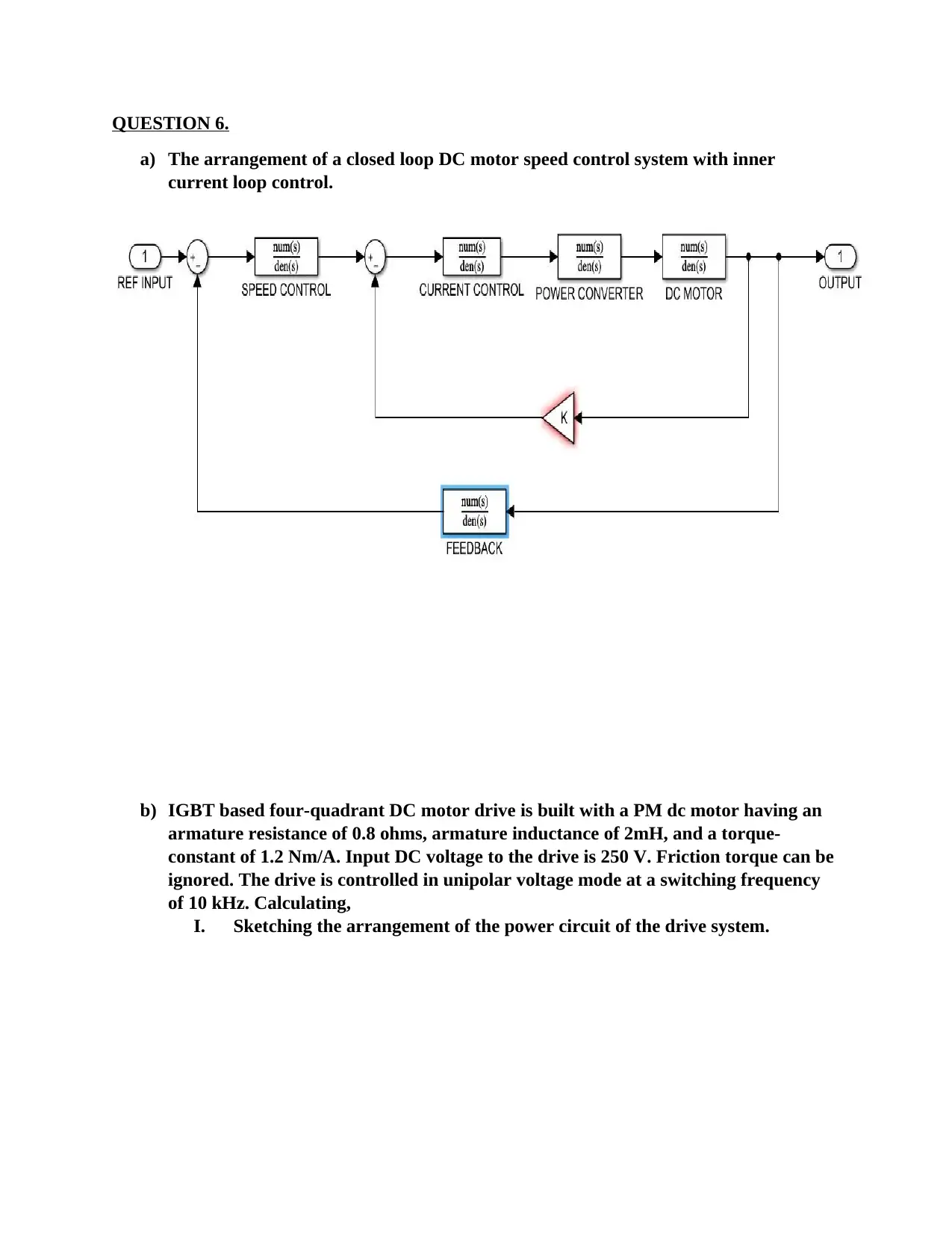
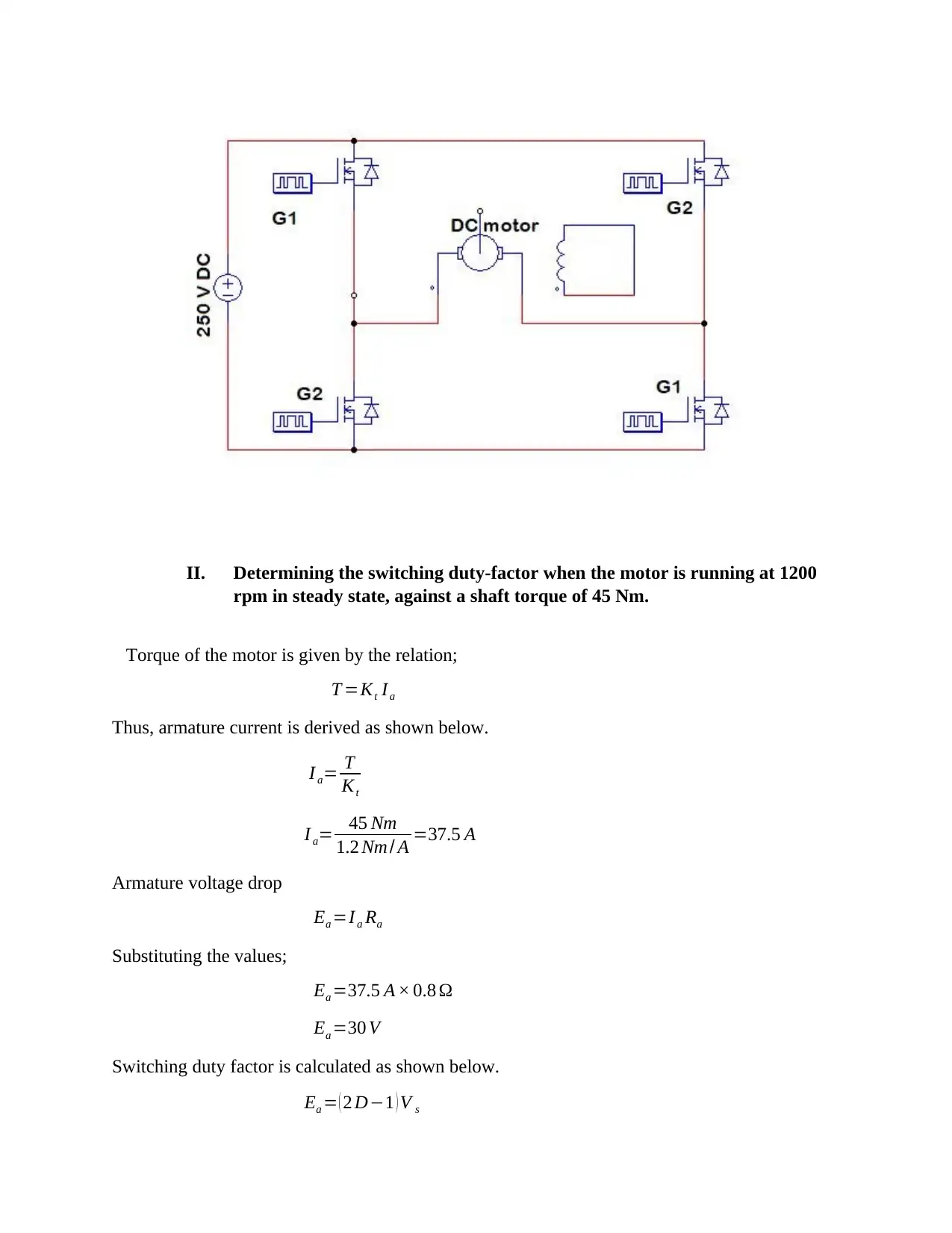
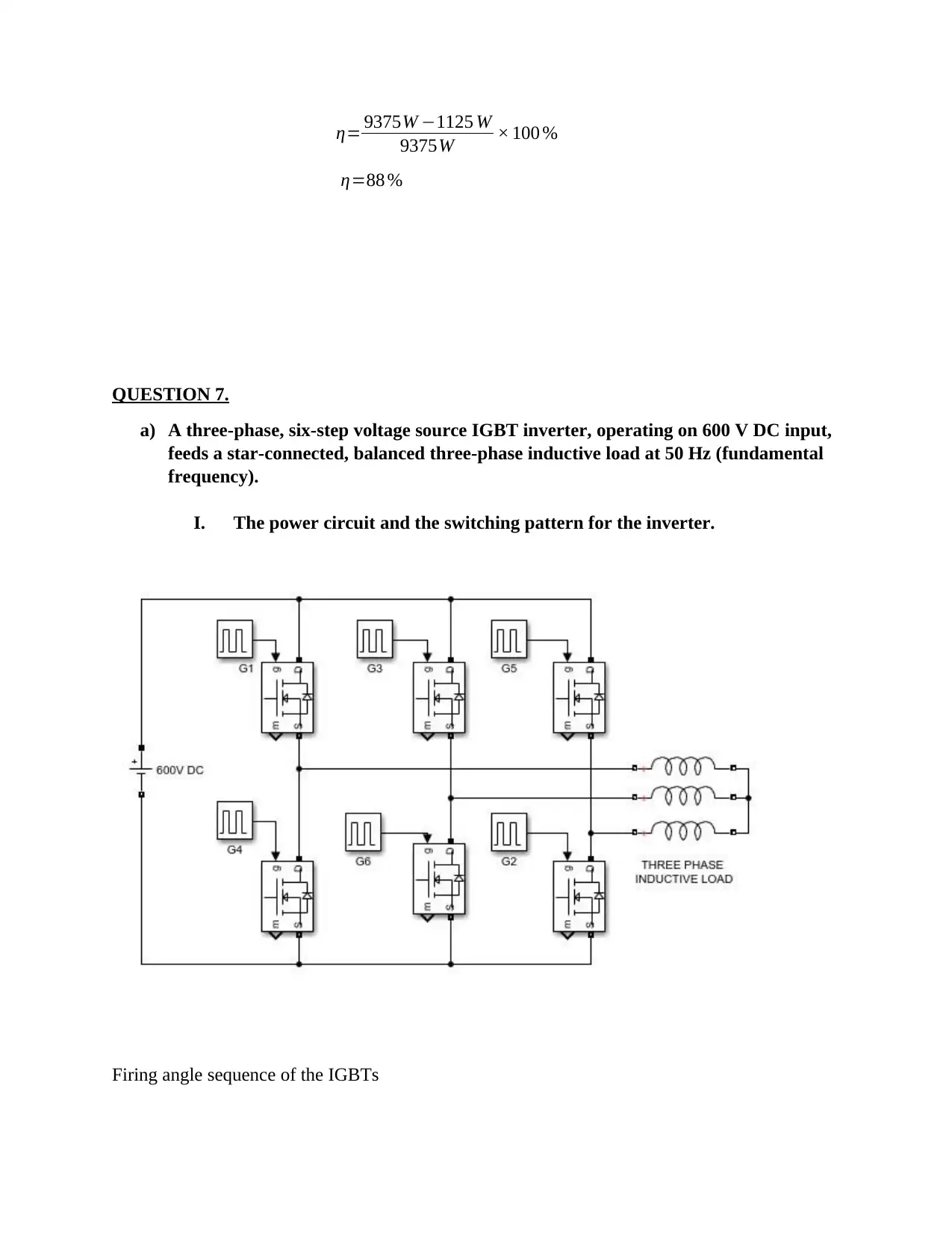
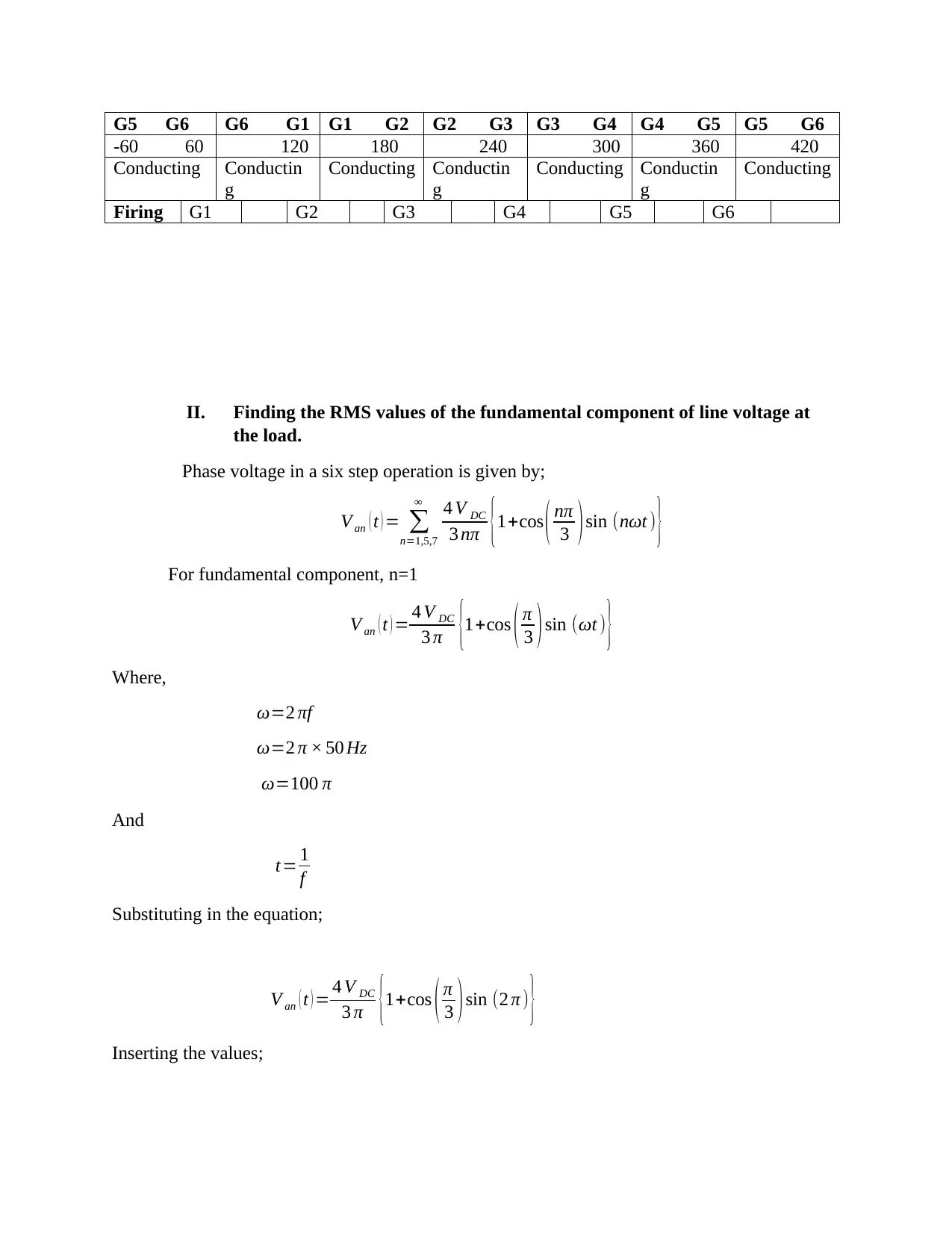
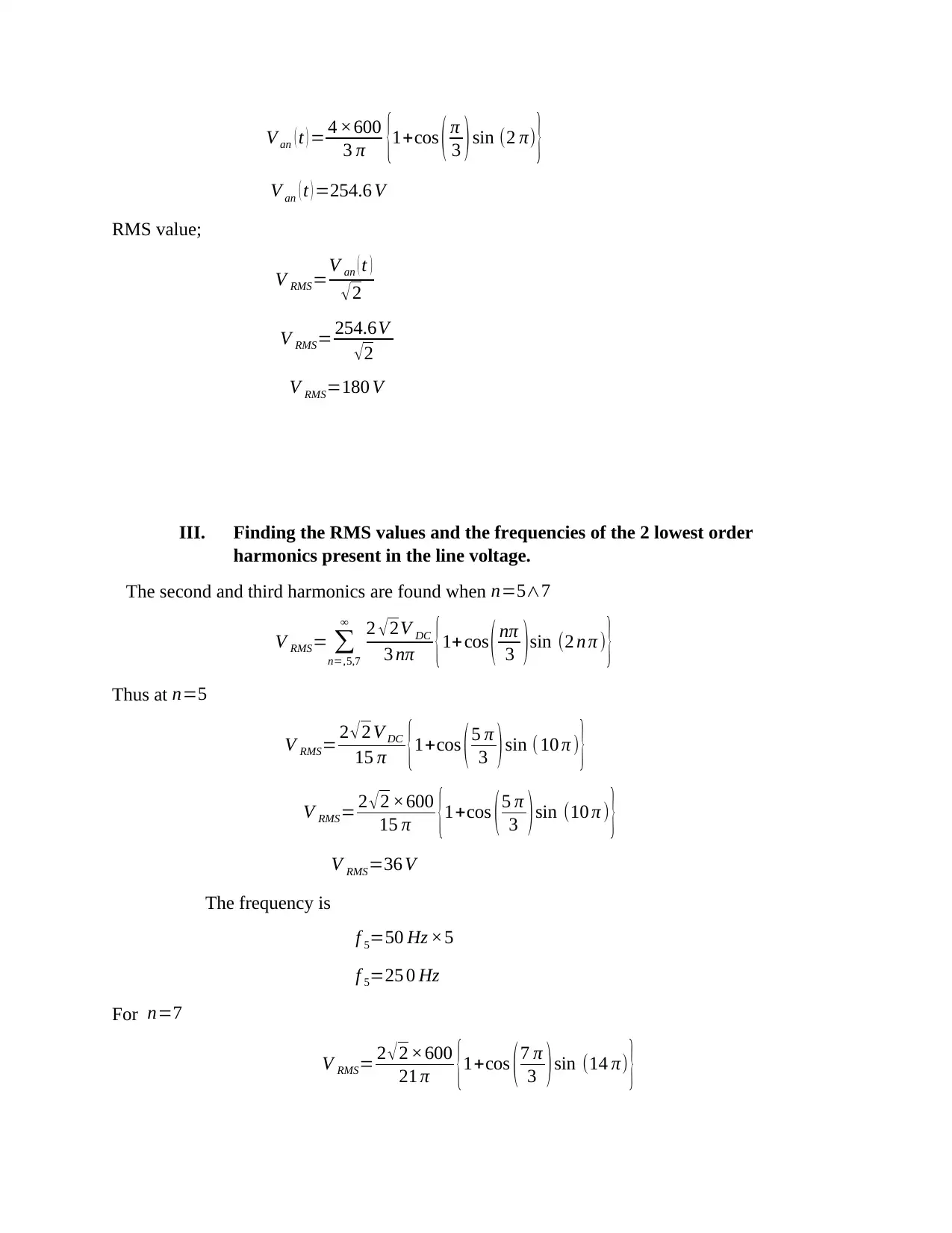
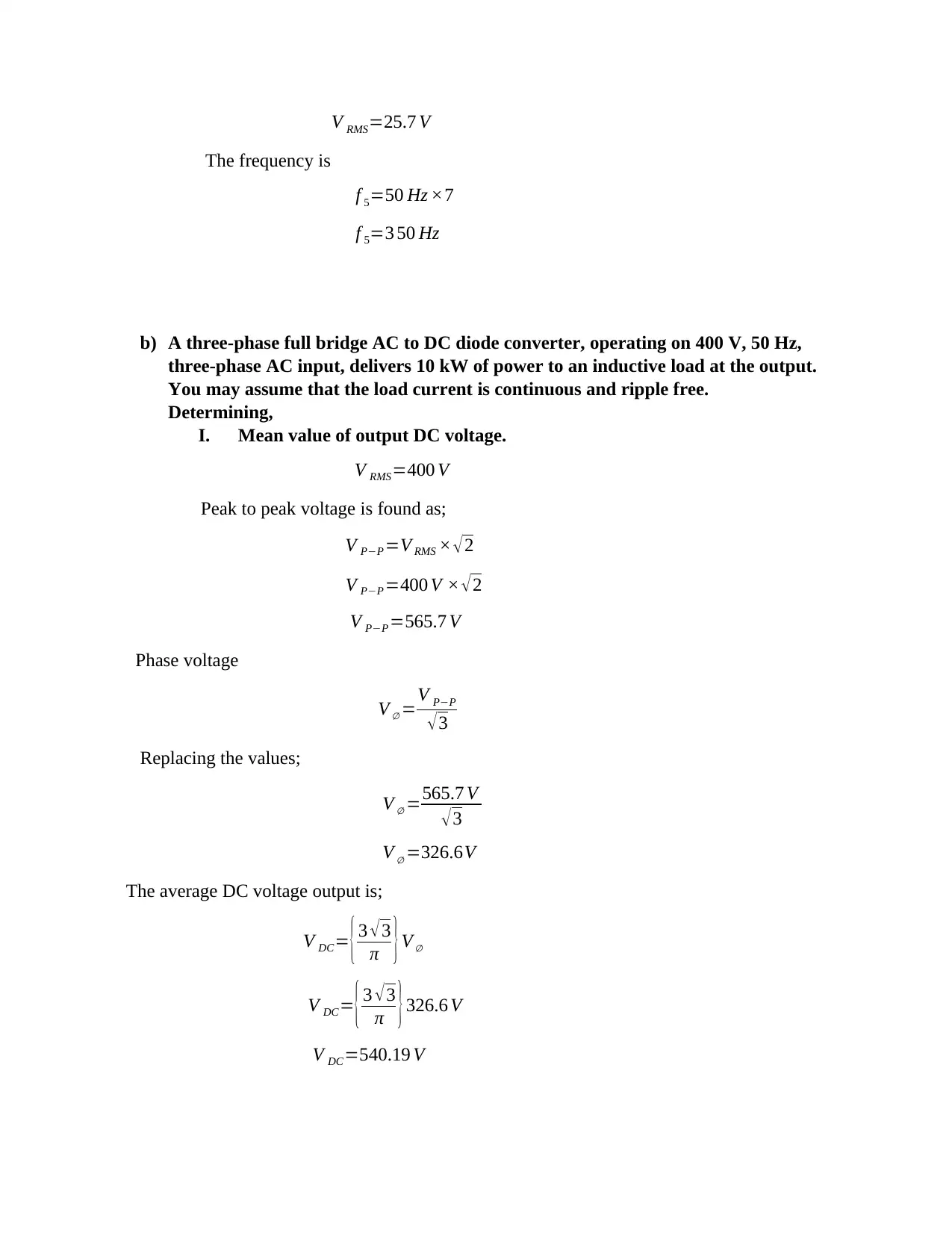
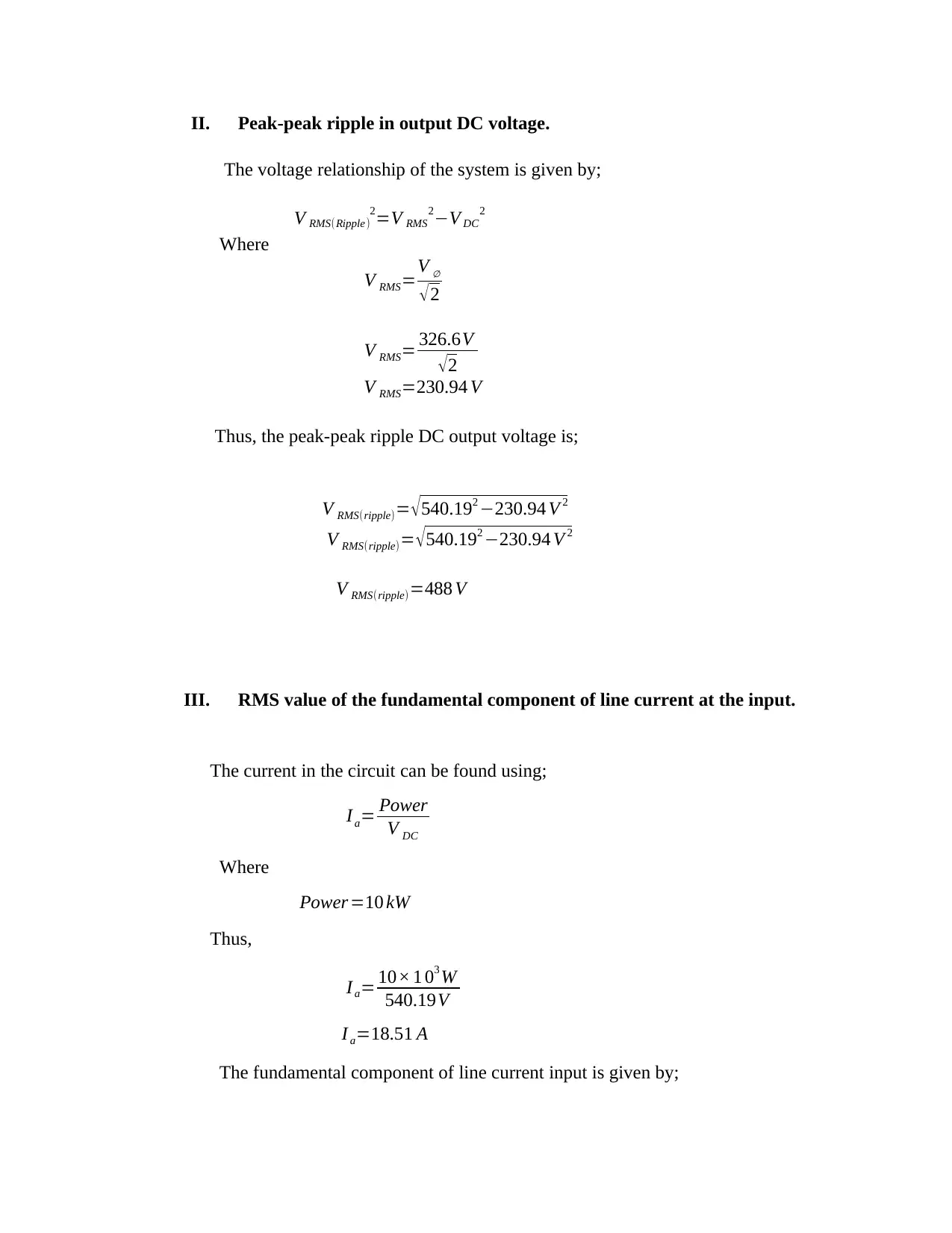
This homework assignment provides a detailed analysis of DC motor speed control systems, including the design of a four-quadrant DC motor drive with inner current loop control. It covers calculations for switching duty factor, armature current ripple, and motor efficiency. The assignment also includes an analysis of a three-phase, six-step voltage source IGBT inverter, determining RMS values of voltage and harmonics. Furthermore, it addresses a three-phase AC to DC diode converter and a three-phase induction motor variable speed drive, including slip regulation and speed ranges for constant-torque and constant-horsepower regions. The solutions involve power circuit arrangements, switching patterns, and calculations related to voltage, current, and frequency control in various electrical drive systems.



1 out of 13
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.