Applied AC and DC Machines: DC Motors Report - First Year
VerifiedAdded on 2022/01/17
|15
|1933
|121
Report
AI Summary
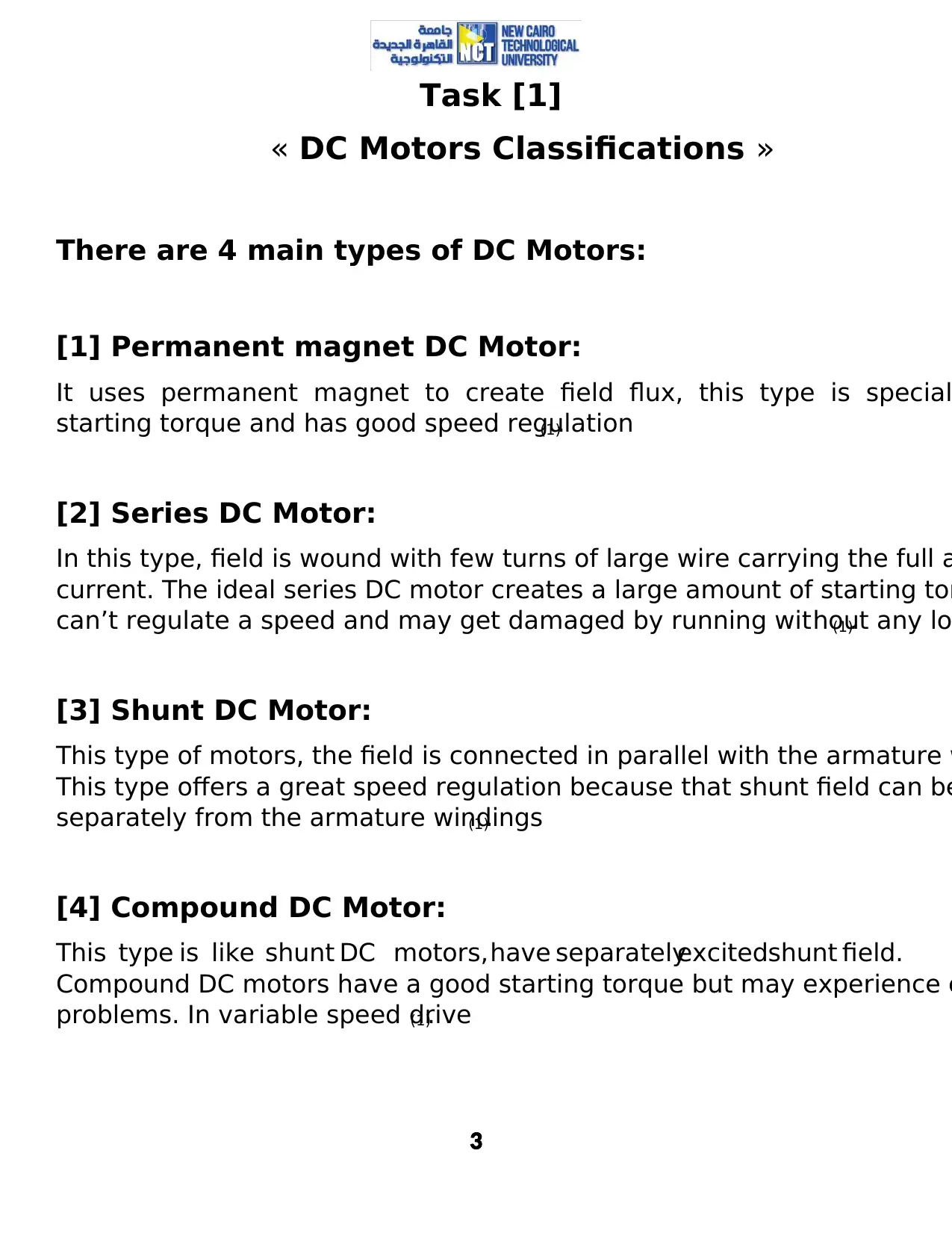
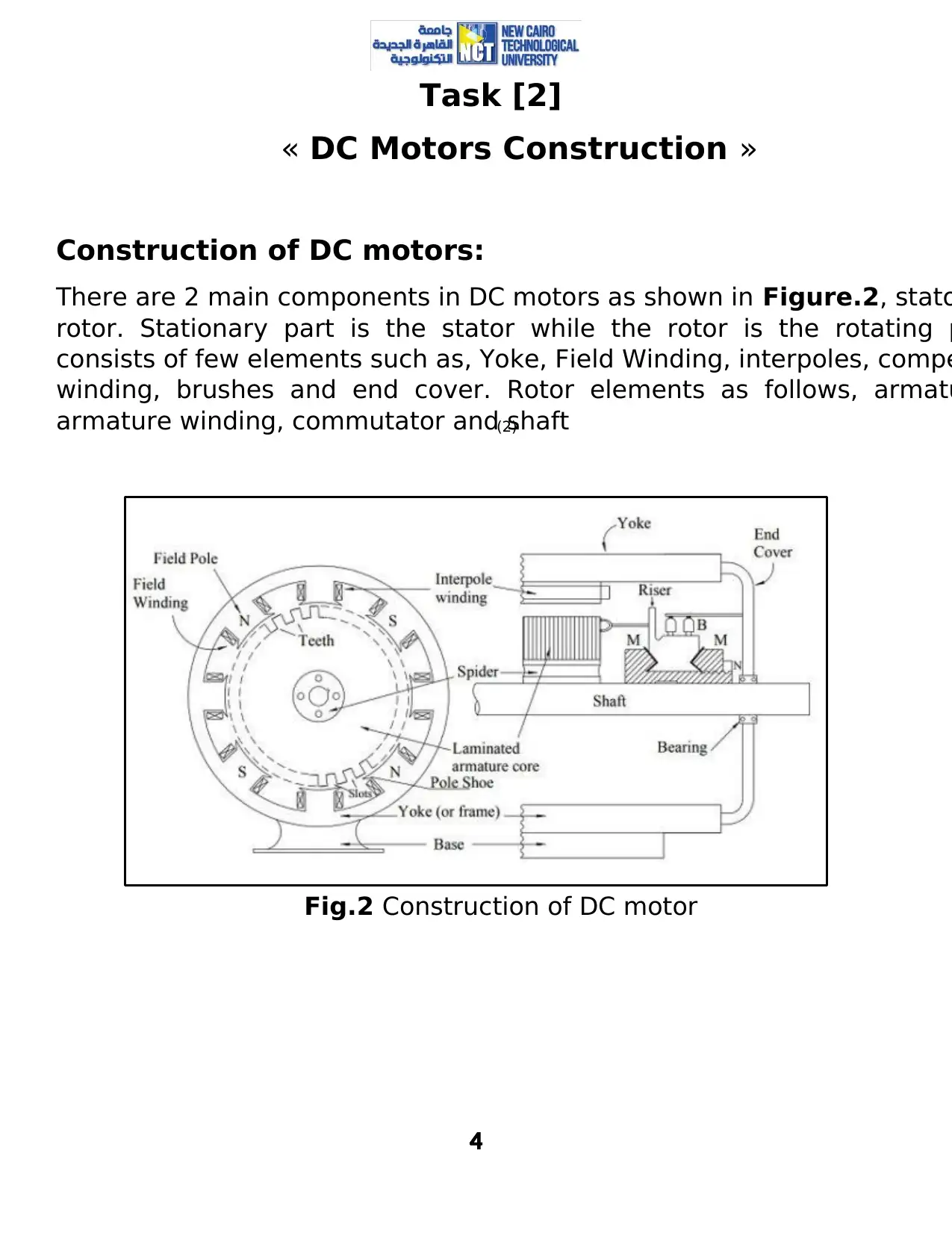
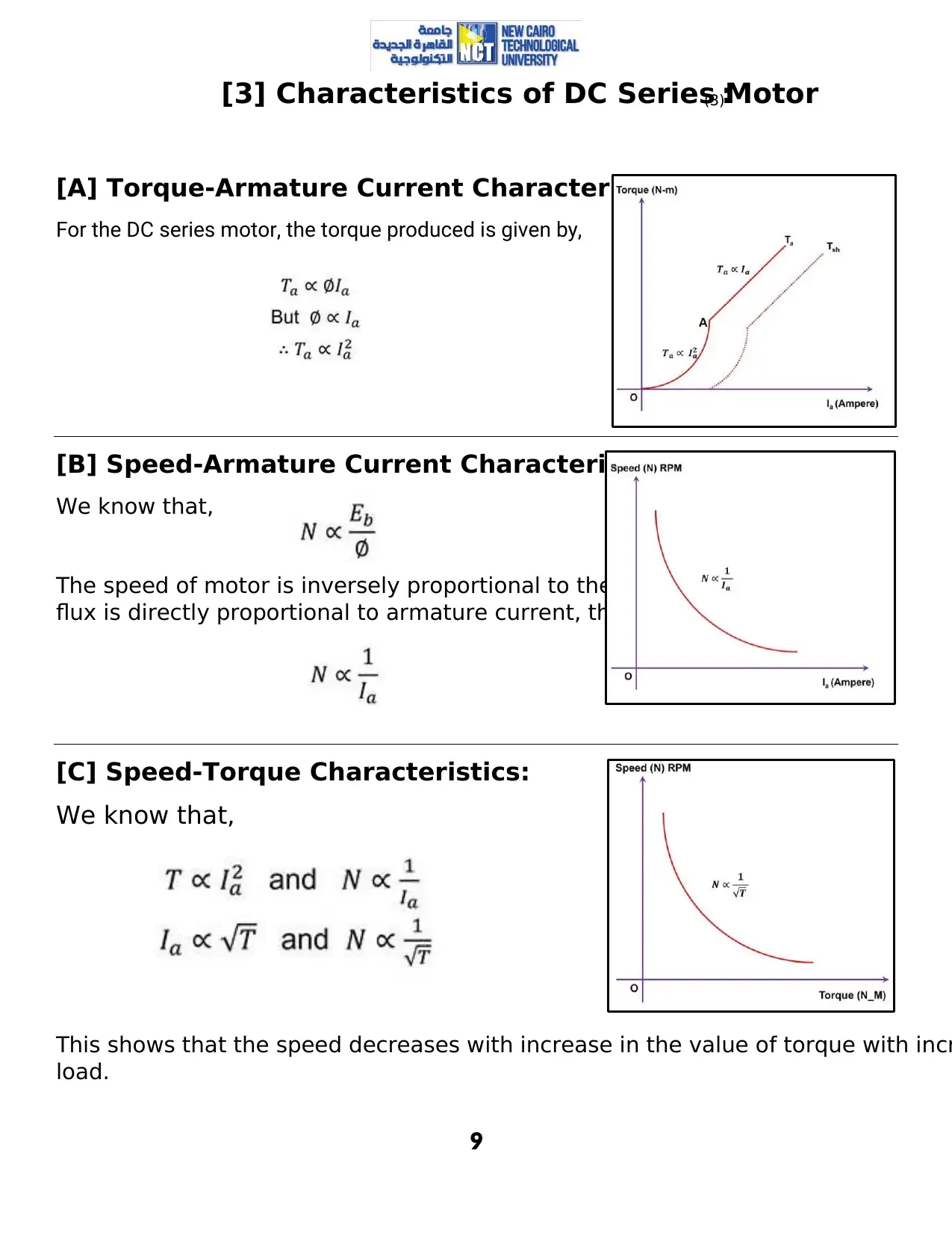
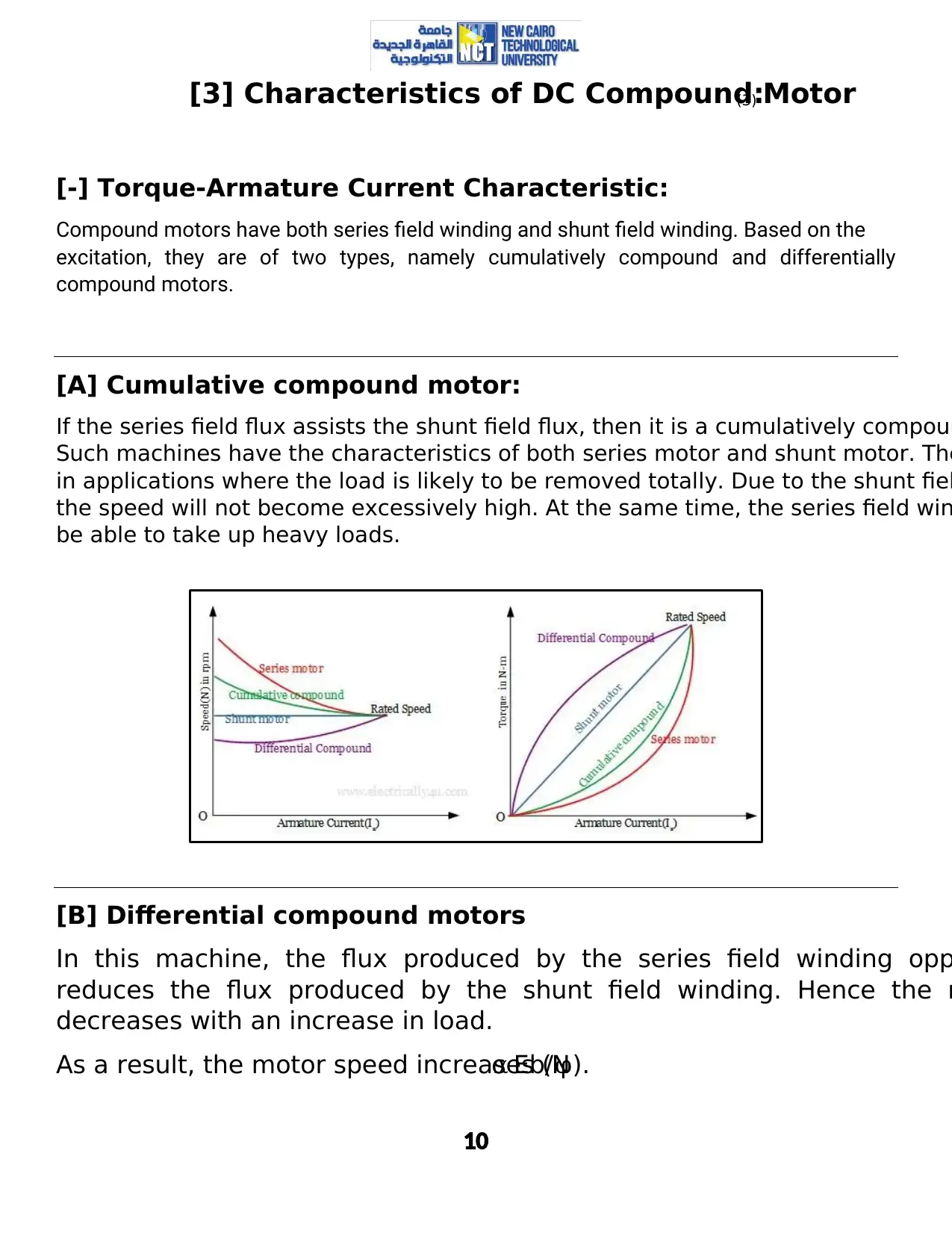
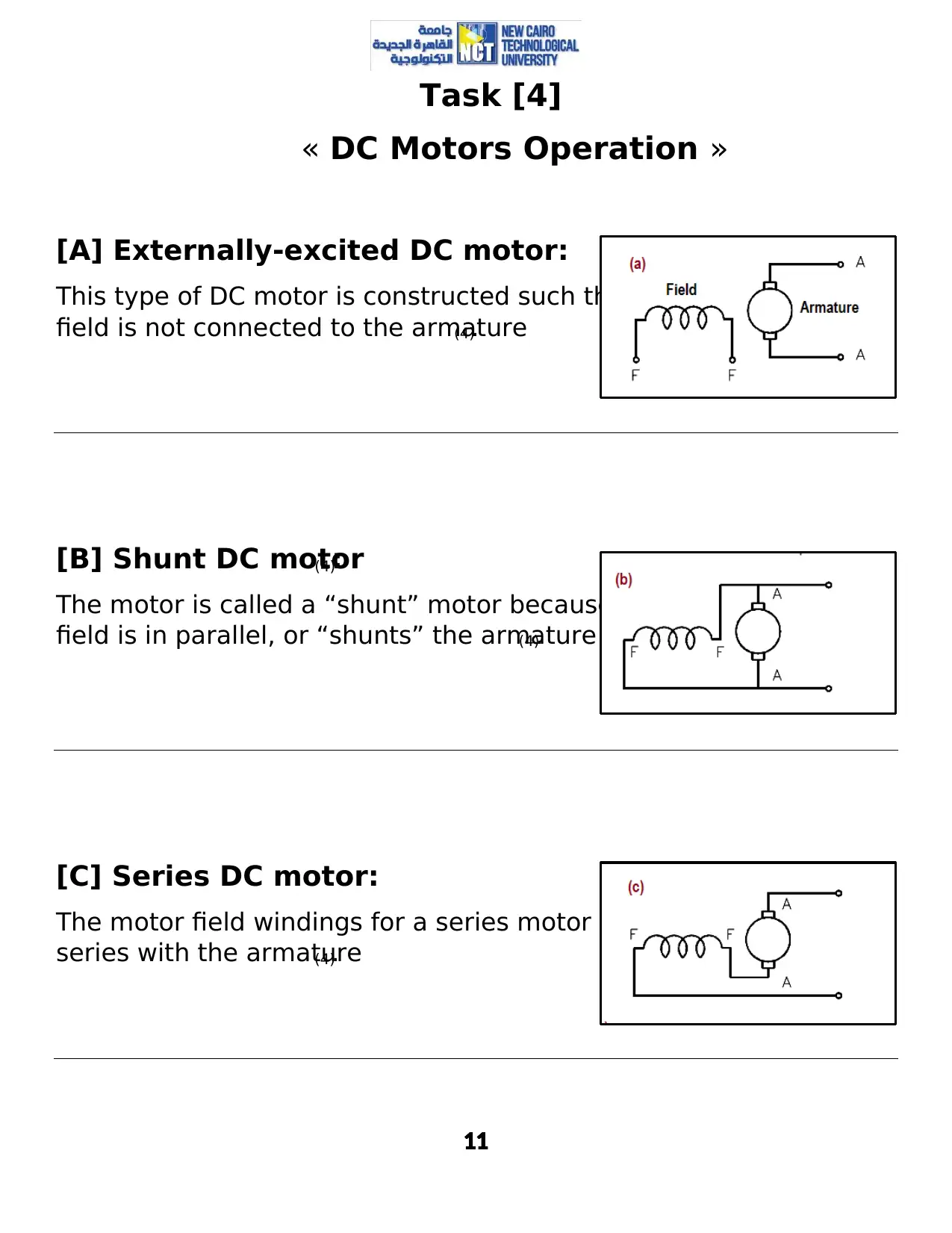
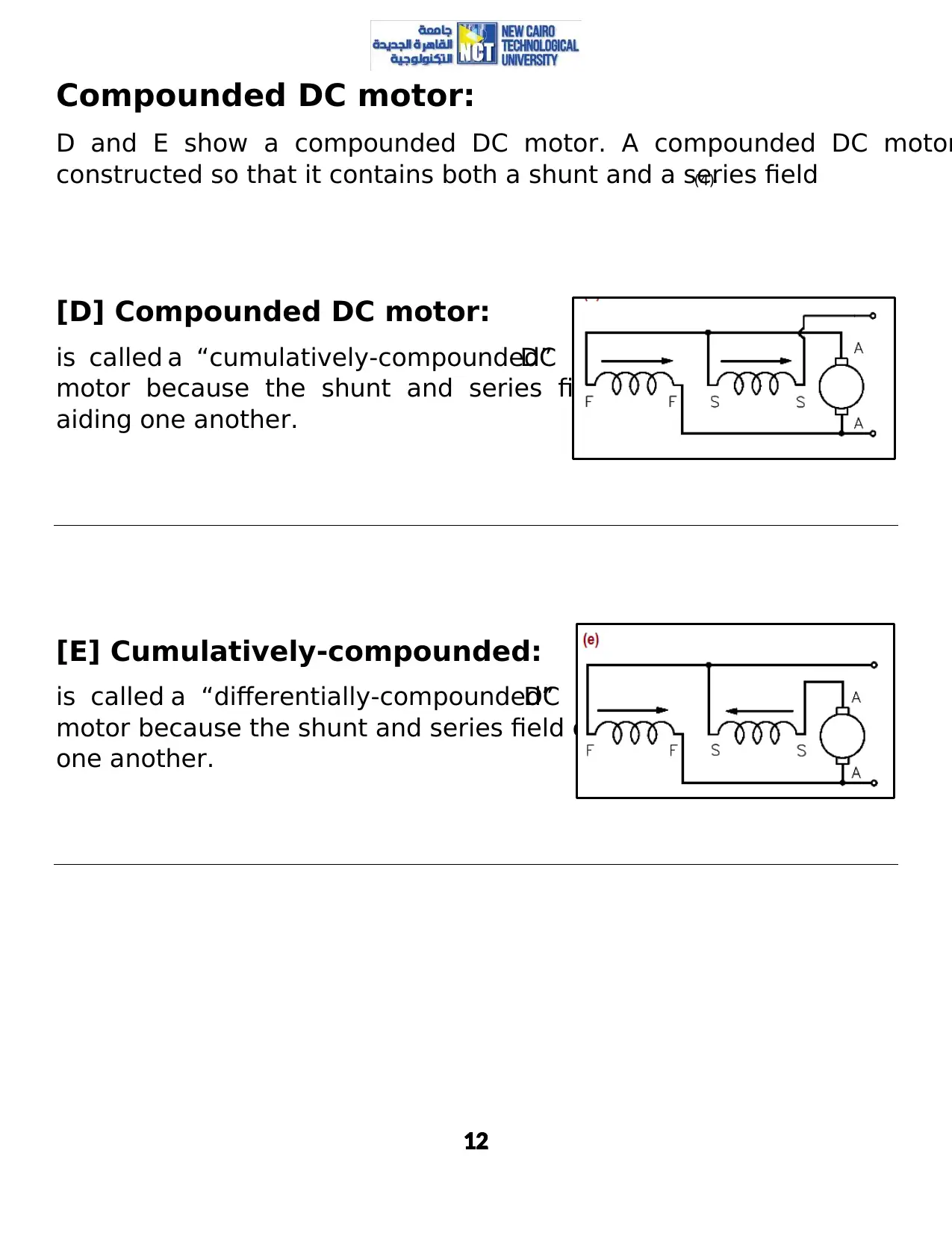
This report provides a comprehensive analysis of DC motors, encompassing their classifications, construction, characteristics, operation, and performance specifications. The report begins by outlining the four main types of DC motors: permanent magnet, series, shunt, and compound motors, detailing their unique features and applications. It then delves into the construction of DC motors, describing the stator and rotor components, including the yoke, field windings, interpoles, compensating winding, brushes, armature core, armature winding, commutator, and shaft. The report further explores the characteristics of DC shunt, series, and compound motors, examining their torque-armature current, speed-armature current, and speed-torque characteristics. Additionally, it explains the different operation modes of DC motors, including externally-excited, shunt, series, and compounded configurations. Finally, the report concludes by discussing DC motor performance parameters such as speed, torque, and operating voltage, and how these specifications are related to the application of the motor. The report also provides references to support the information presented.
1 out of 15
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.