ENEM20001: Advanced Dynamic Modeling & Mechanical Control of Quad Bike
VerifiedAdded on 2023/06/07
|15
|1301
|293
Project
AI Summary
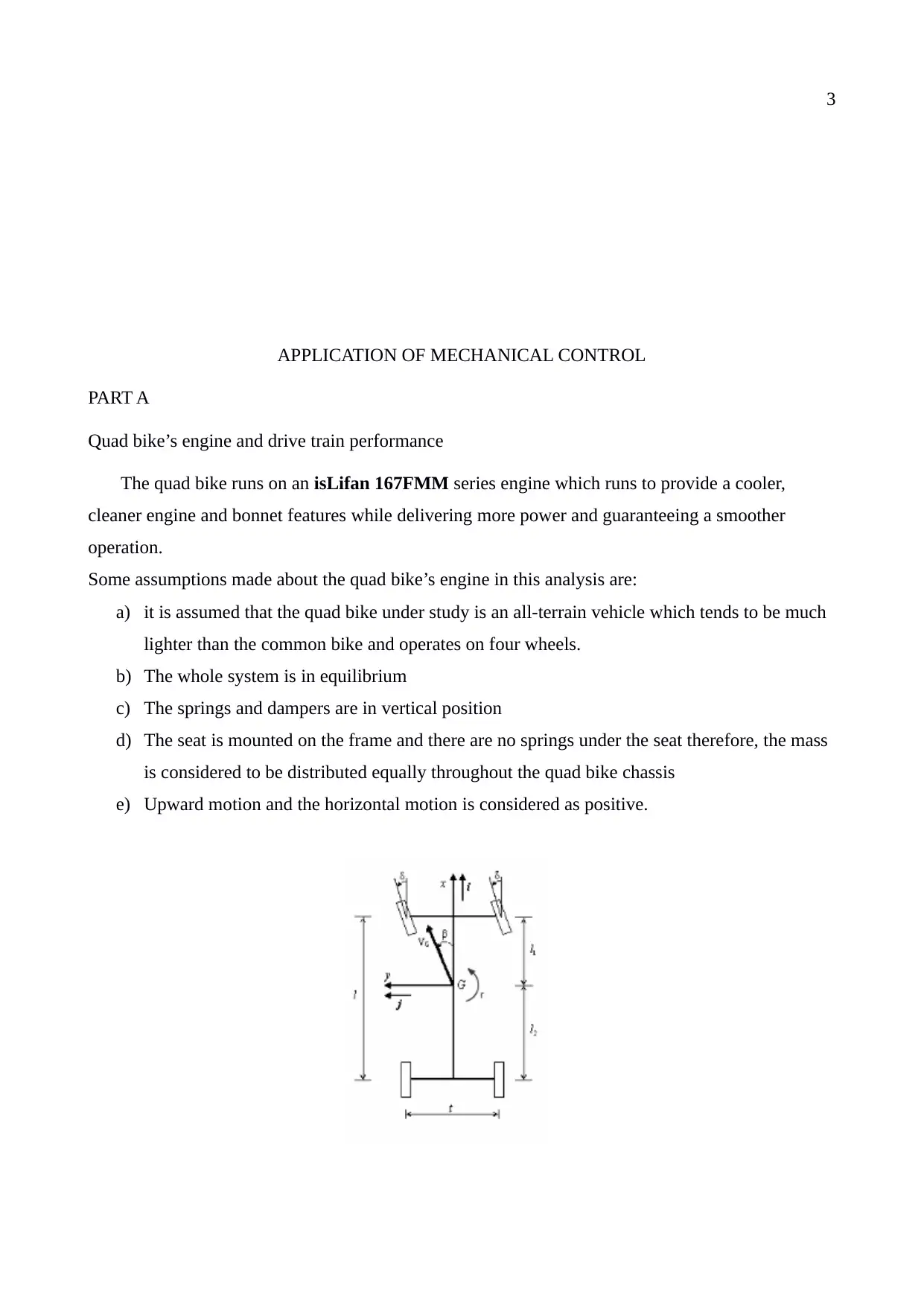
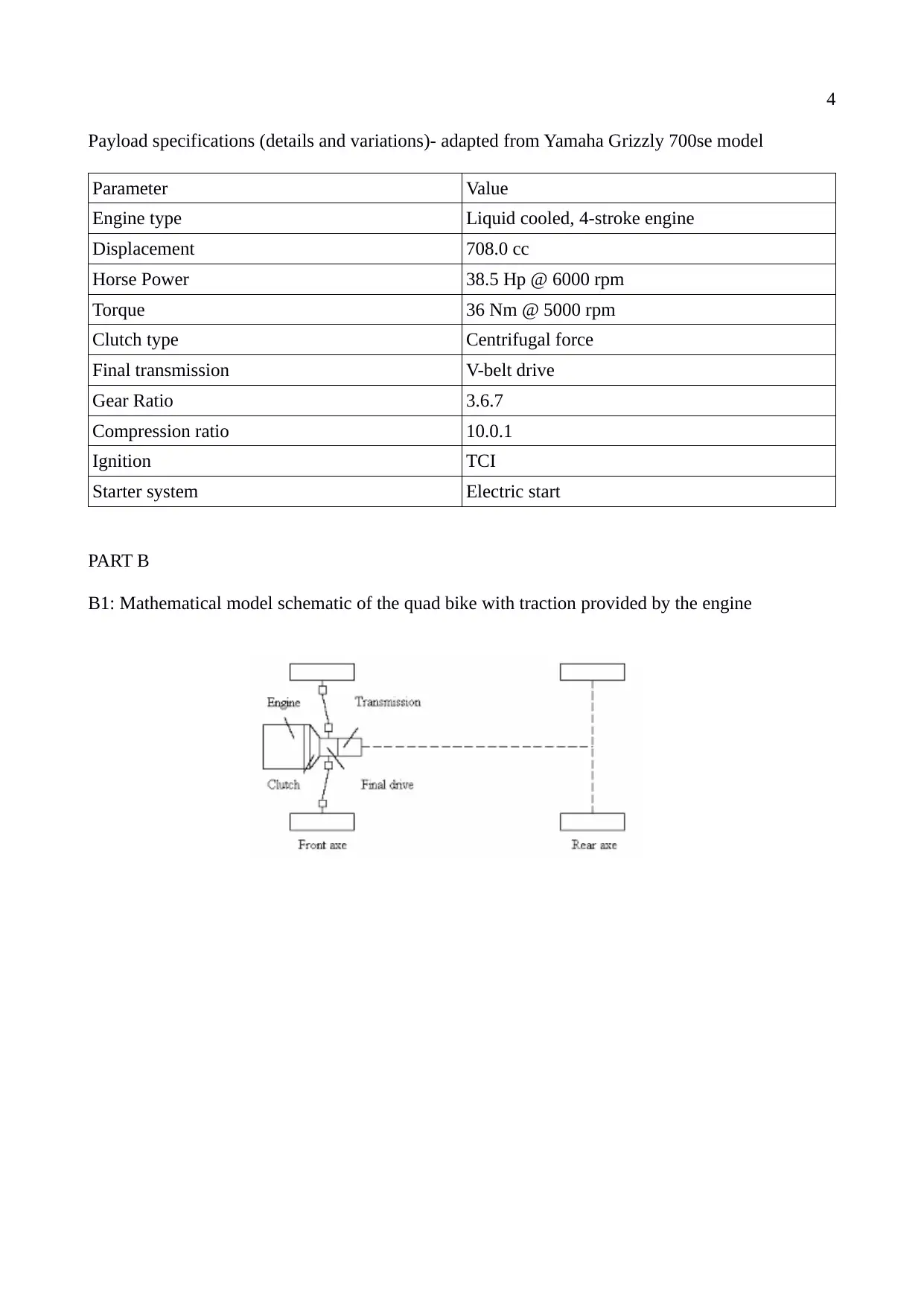
This project report delves into the dynamic modeling, simulation, and control of a quad bike system, focusing on the application of mechanical control principles. It begins with an analysis of the quad bike's engine and drivetrain performance, considering factors like engine type, horsepower, torque, and gear ratios. The report develops a mathematical model of the quad bike, incorporating tractive force, rolling resistance, and throttle level, and simplifies the system to a single degree of freedom for horizontal motion analysis. Simulink models are created to simulate the system's behavior at various throttle positions, and the results are compared to theoretical calculations. Further analysis includes estimating the center of gravity, creating a 2 DOF model, and adding a PID controller to achieve wheel stand control. The report also addresses engine power limitations, analyzes controller performance on road corrugations, and re-assesses values for the quad bike. Finally, a four-degree-of-freedom system model is presented, discussing the benefits of dynamic analysis, controller accuracy, and implementation steps for a real quad bike, concluding with the importance of controllers for optimized engine performance.



1 out of 15

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.