Dynamic System Modeling and Control of a Two-Wheeled Vehicle
VerifiedAdded on 2020/03/07
|7
|1068
|146
Project
AI Summary
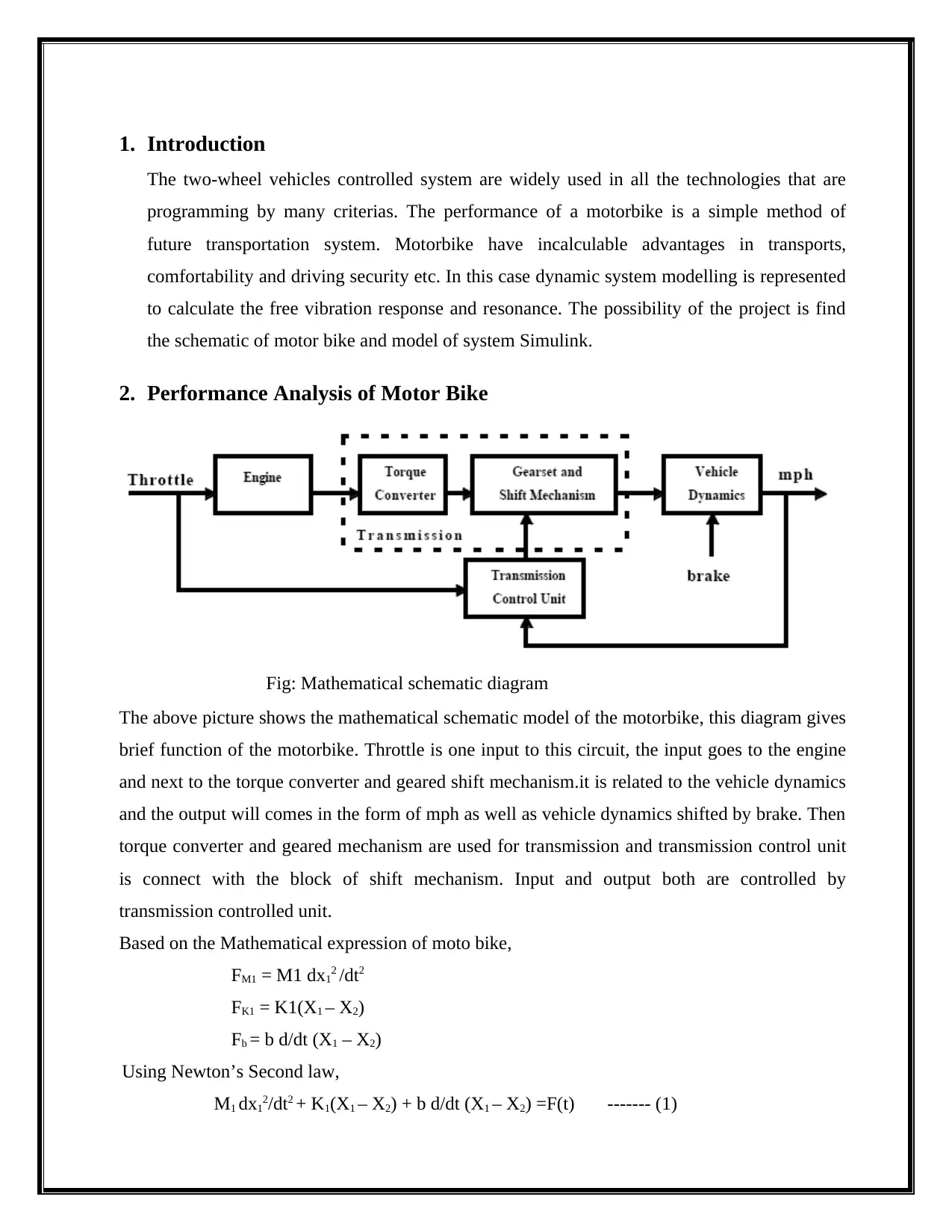
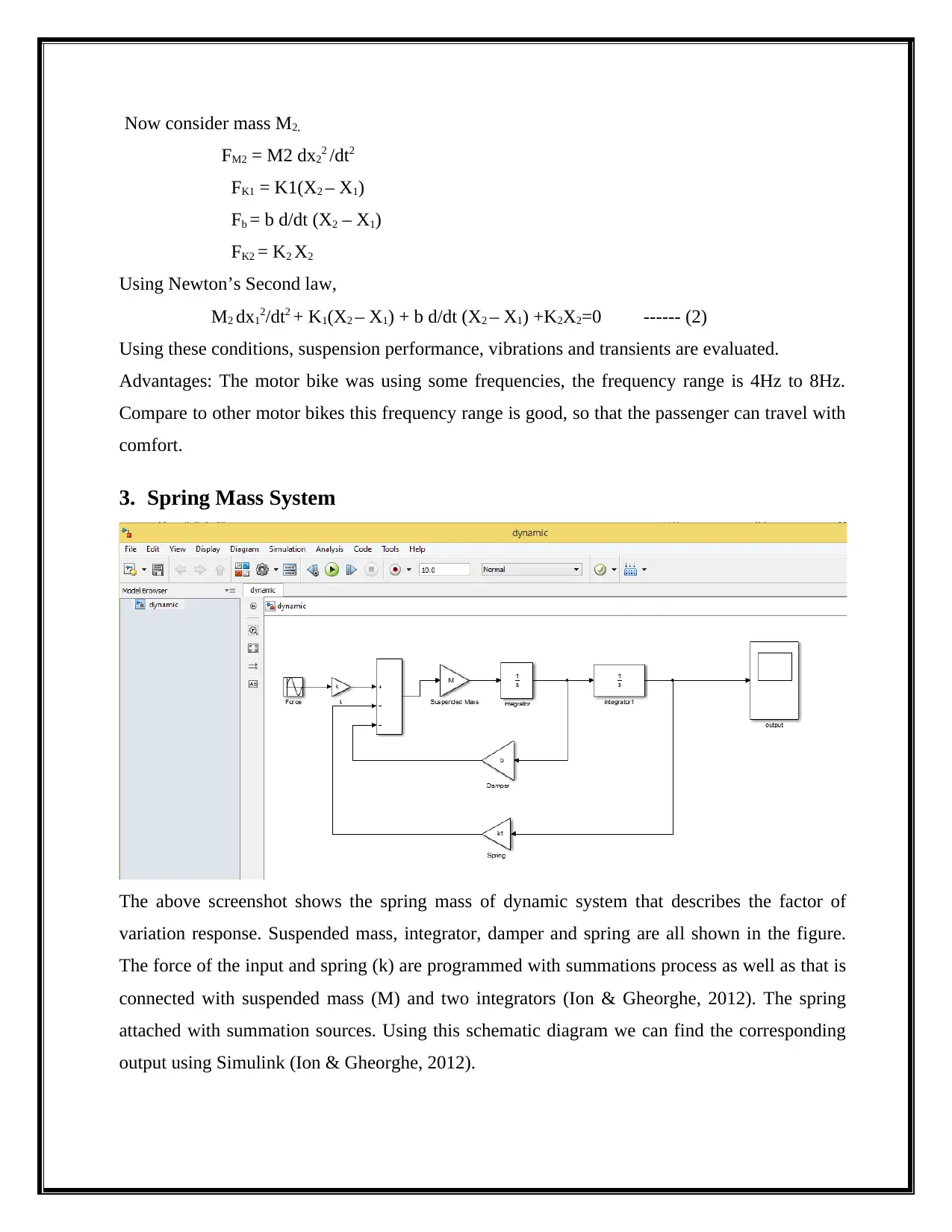
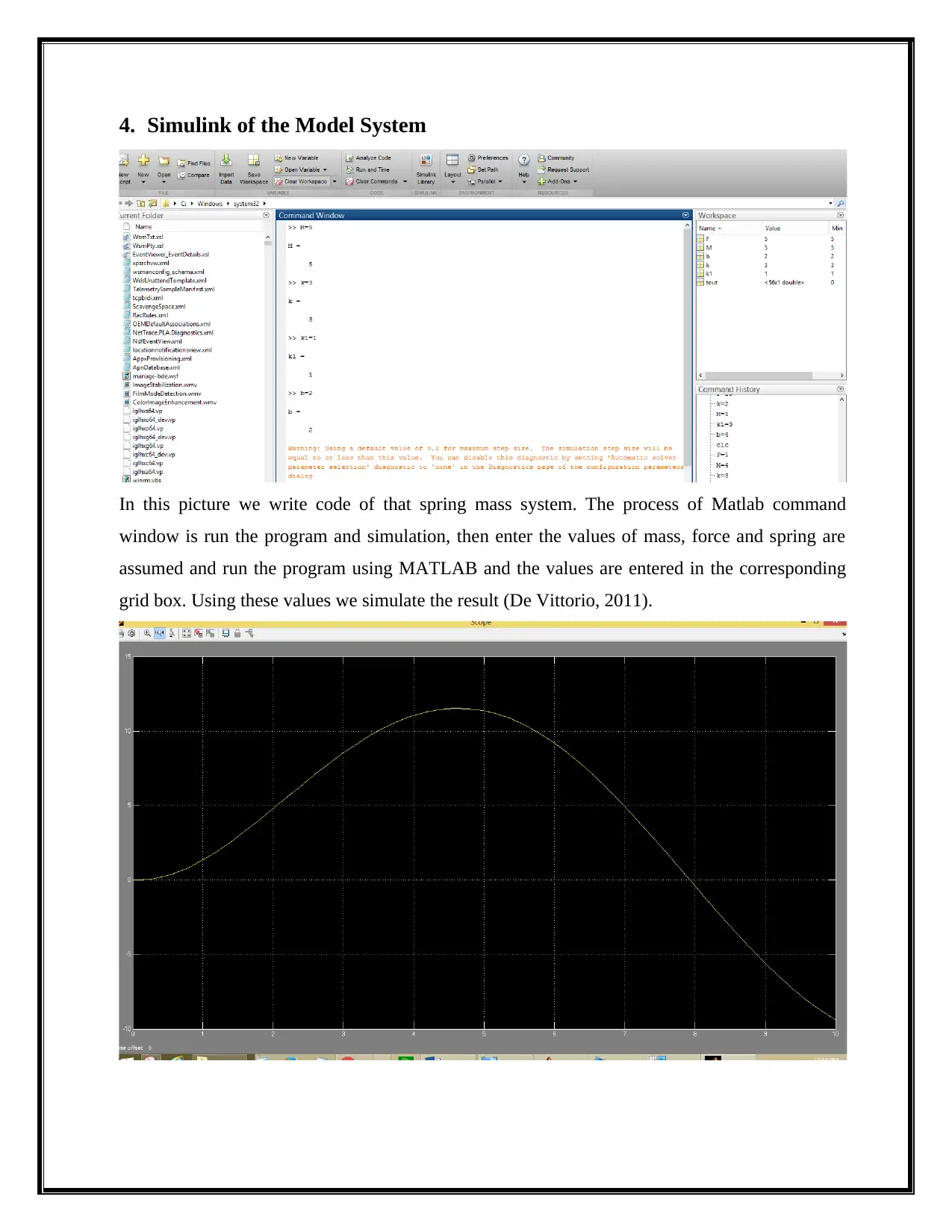
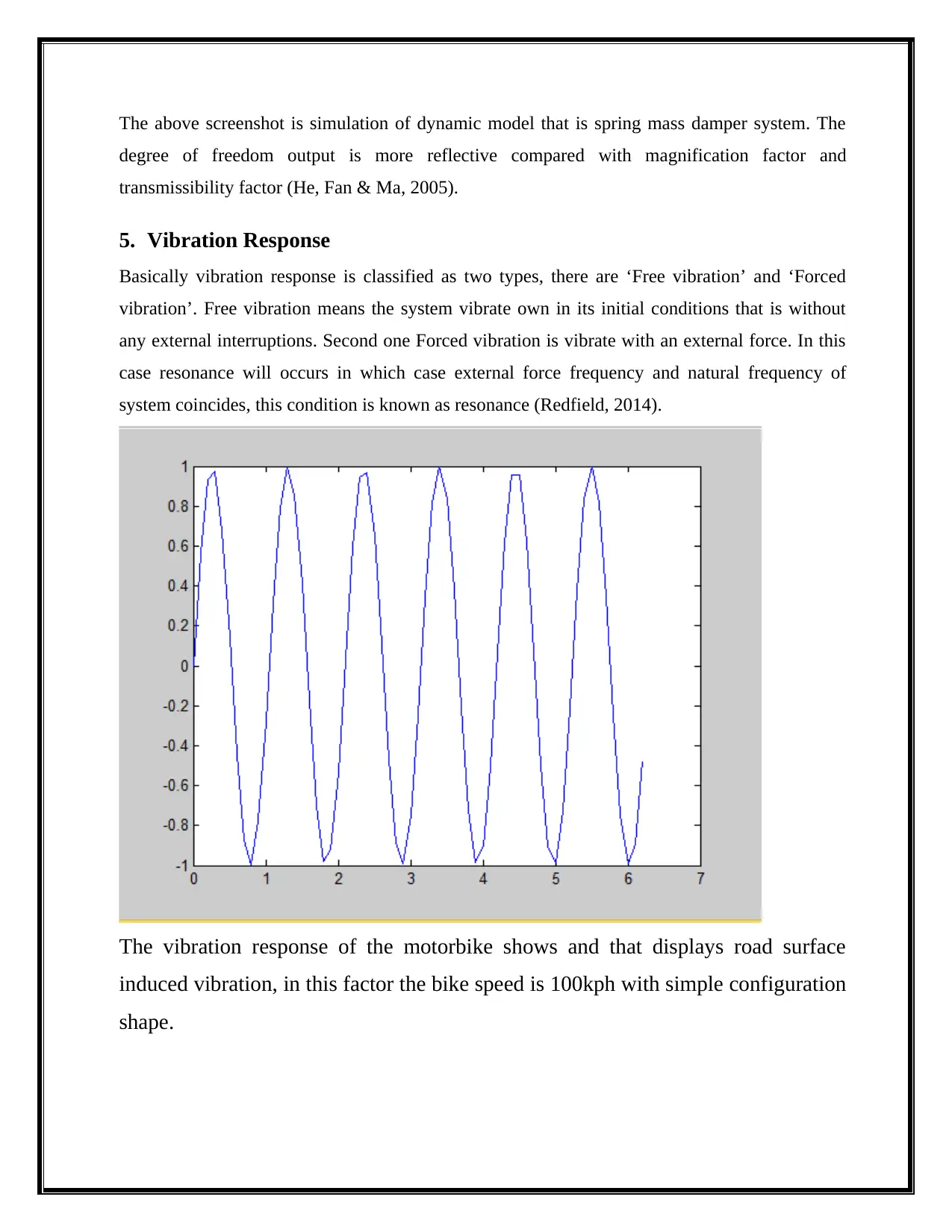
This project focuses on the dynamic system modeling and control of a motorbike. It begins with a mathematical schematic diagram of the motorbike, detailing the relationships between throttle input, engine, torque converter, geared shift mechanism, and vehicle dynamics. The project then formulates the governing equations using Newton's Second Law, considering the masses, springs, and dampers of the system. A spring-mass system model is introduced to describe the vibration response characteristics. The project utilizes Simulink to simulate the dynamic model, demonstrating the behavior of the system under various conditions. The analysis covers both free and forced vibrations, explaining the concept of resonance. The Laplace transform is applied to the modeling equations to further analyze the system's behavior. The project concludes with a discussion of the motorbike's performance, highlighting the influence of factors like bike mass, fuel capacity, and wheel mass on the system's dynamics. References to supporting literature are included.
1 out of 7
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.