Mechanical Engineering: Dynamics Assignment - Vibration Analysis
VerifiedAdded on 2021/10/12
|10
|1151
|89
Homework Assignment
AI Summary
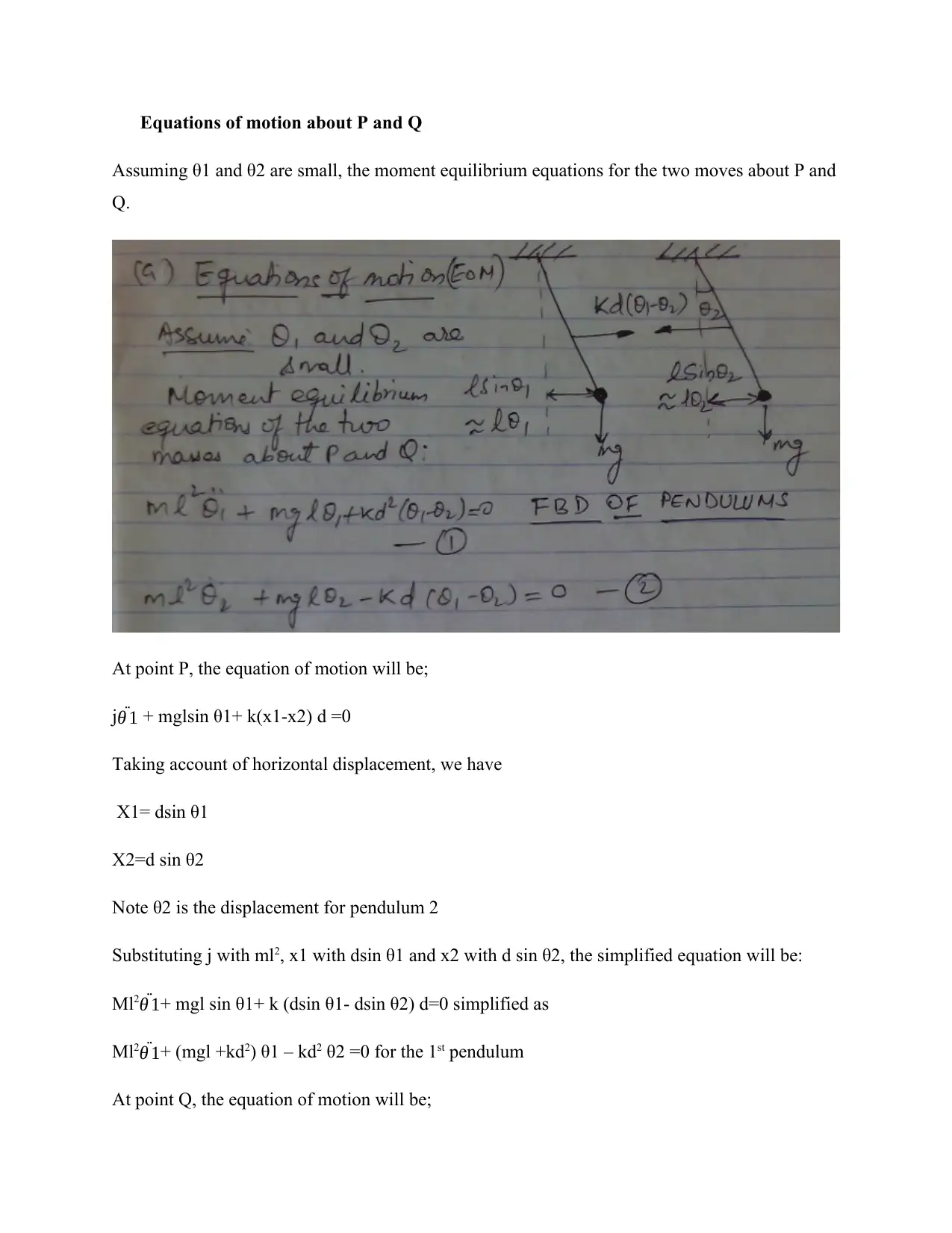
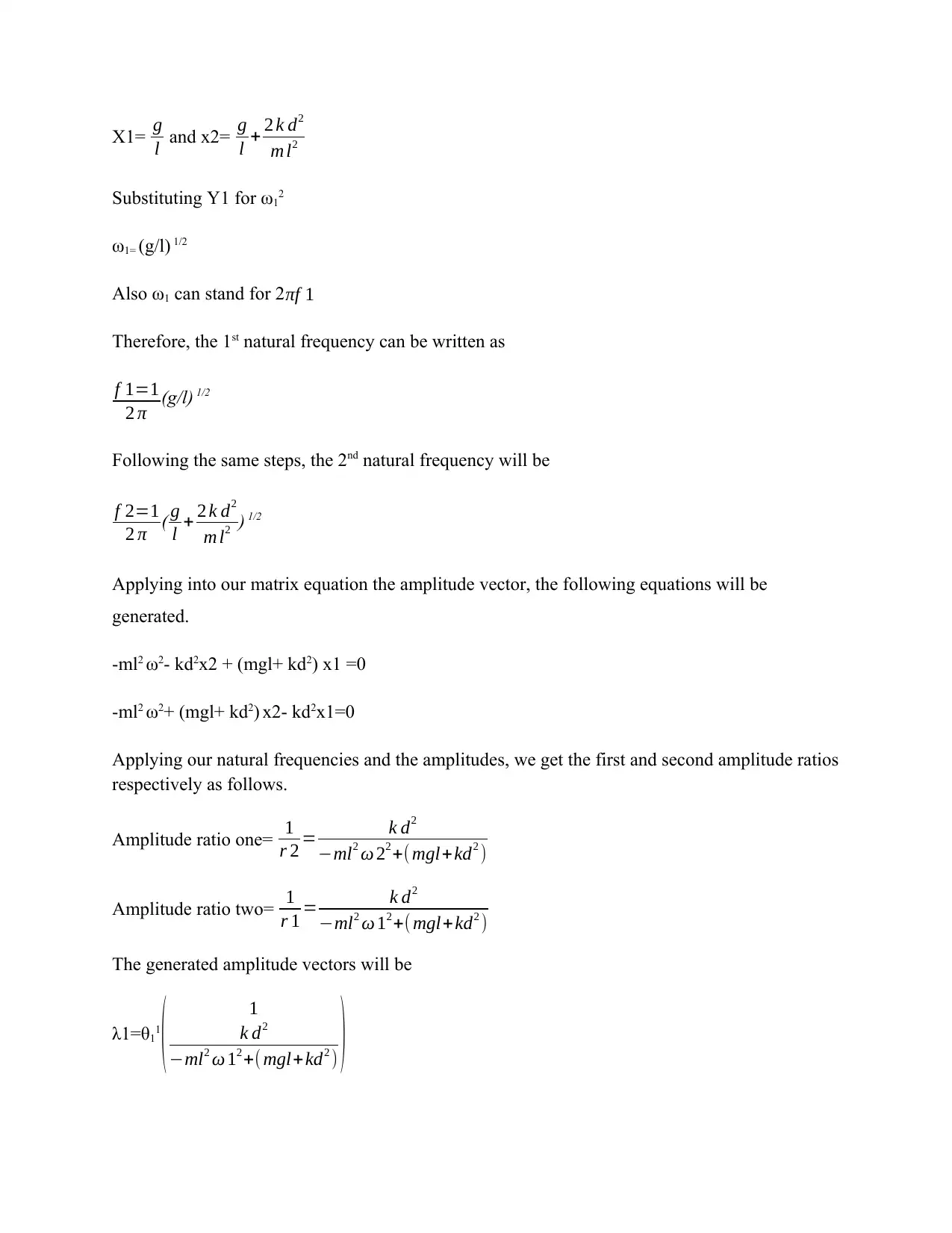
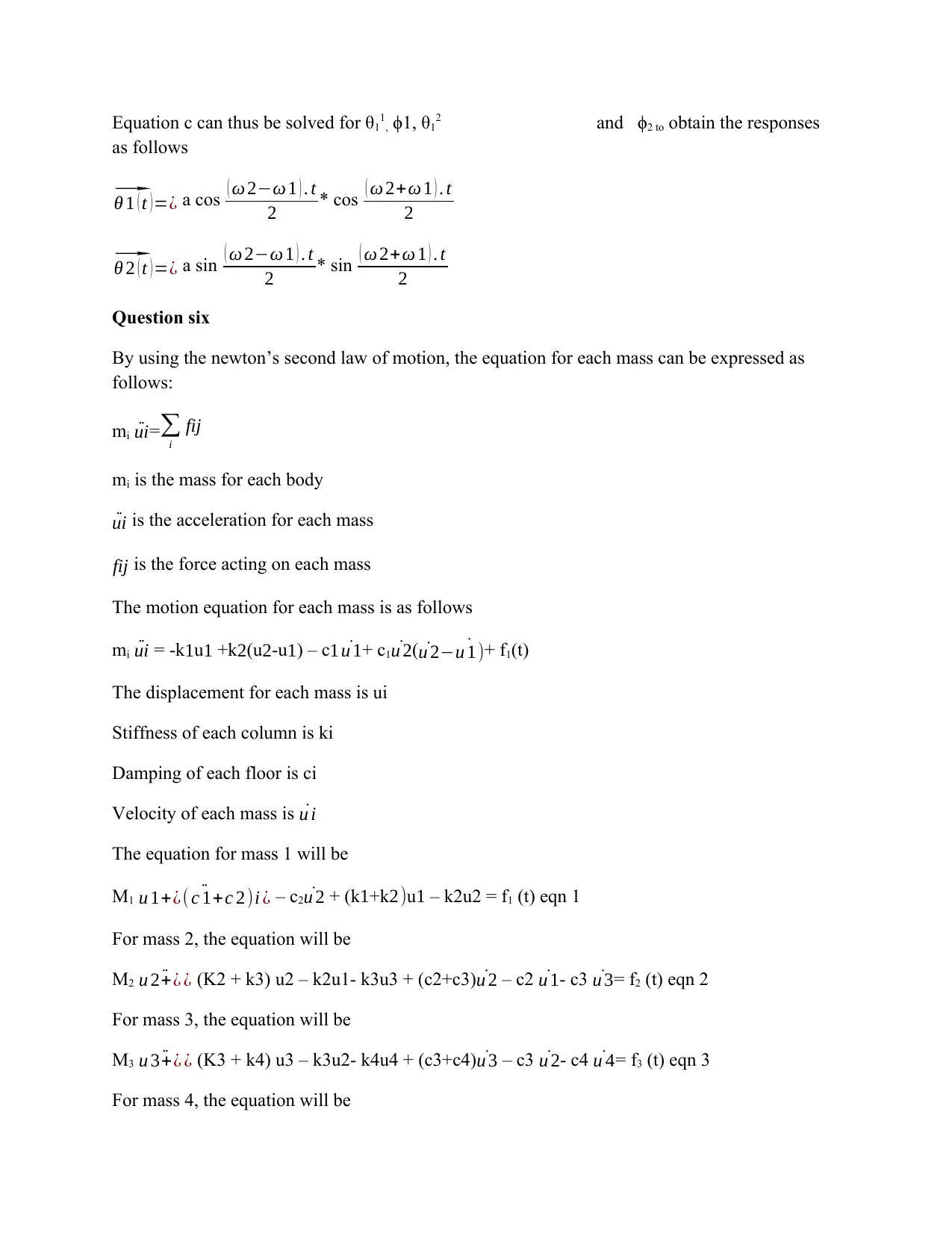
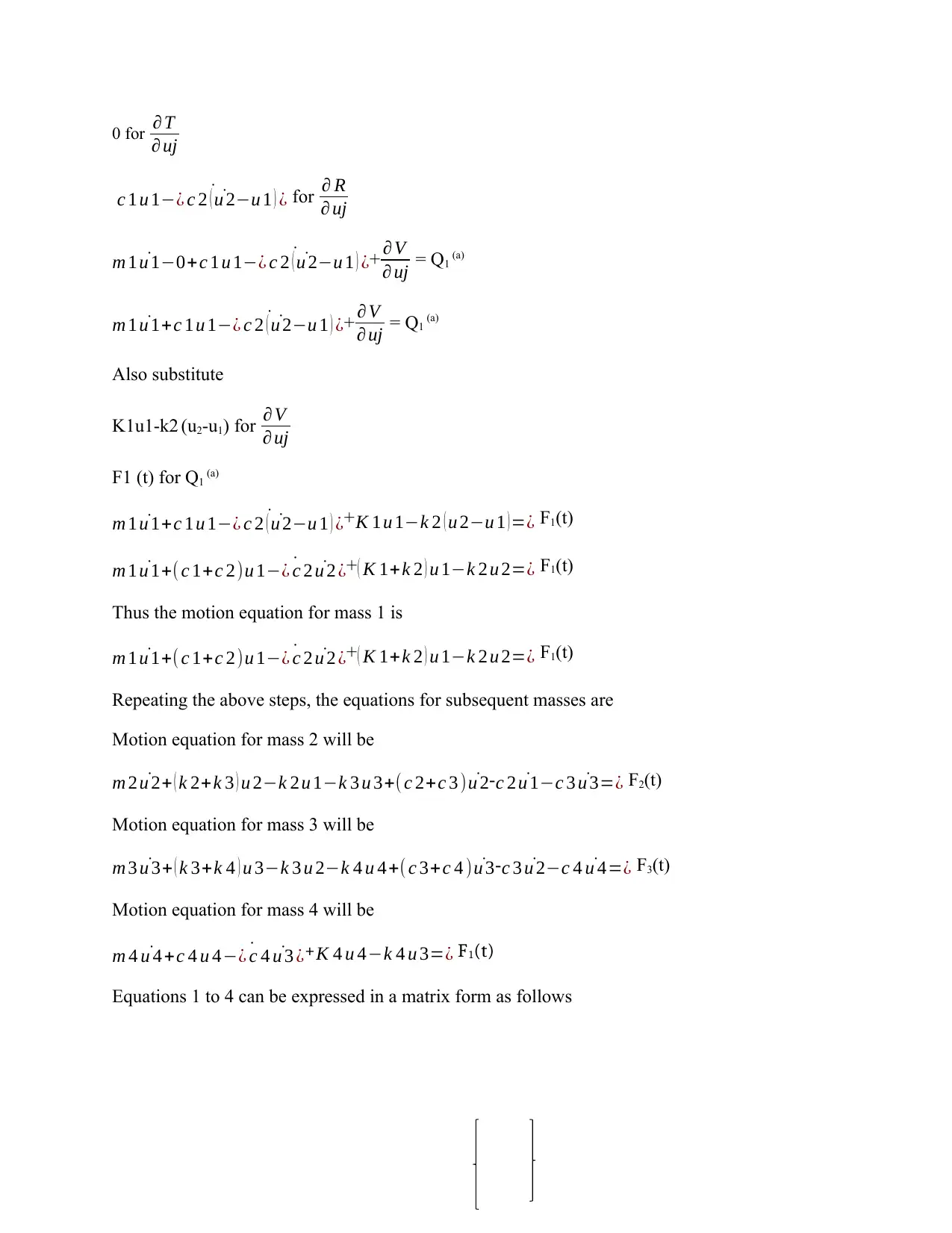
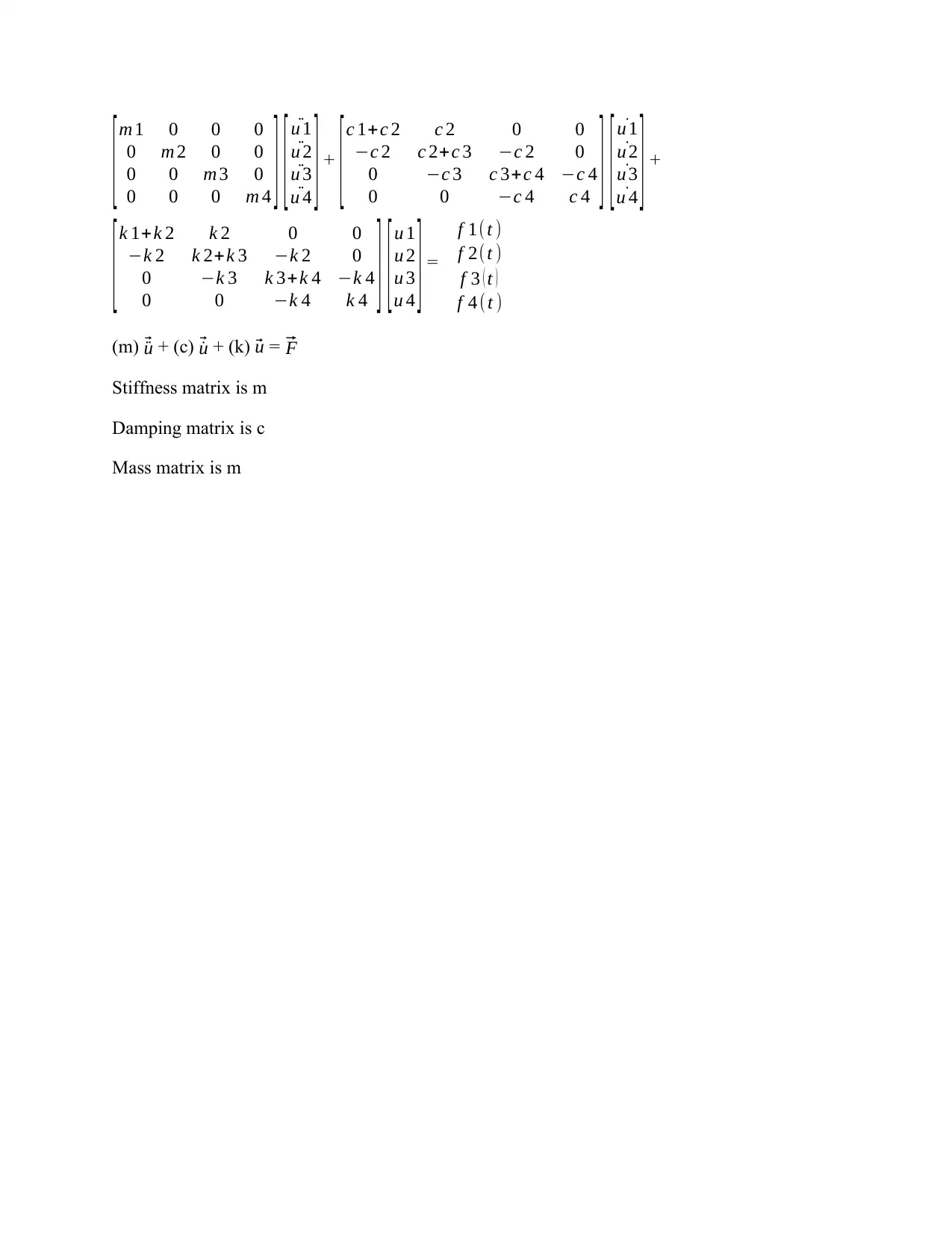
This document presents a detailed solution to a mechanical engineering dynamics assignment. The solution begins with deriving equations of motion for a two-pendulum system using moment equilibrium equations at points P and Q. It then calculates natural frequencies and modal shapes, assuming simple harmonic motion, and expresses the equations in matrix form. The analysis proceeds to determine the linear vibration response using superposition of natural modes, considering initial conditions. The document also solves a multi-mass system problem using Newton's second law and Lagrange's equation of motion, deriving equations for each mass and expressing them in matrix form. The assignment covers various aspects of dynamics, including vibration analysis, equations of motion, and system modeling.





1 out of 10

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.