NEU Mechatronics Project: Acceleration Slip Regulation
VerifiedAdded on 2021/01/07
|16
|3336
|401
Project
AI Summary
This project, submitted to Near East University's Mechatronics Engineering department, investigates Acceleration Slip Regulation (ASR) in electric vehicles with independent front-wheel drive. It explores the ASR system's function in controlling torque and preventing wheel slippage, similar to ABS, especially on slippery roads. The research includes simulations using MATLAB, analyzing the role of yaw rate, and examining applications in vehicles like Corvette and Mercedes-Benz. The project details the Vehicle Control Unit (VCU) system, mathematical calculations, and advantages/disadvantages of ASR, alongside design considerations for dynamic electric vehicles. It also covers slippage control, the impact of road conditions, and provides a comprehensive overview of ASR's implementation and benefits in enhancing vehicle stability and performance.
Near East University
Faculty of Engineering
Mechatronics department
Faculty of Engineering
Department of Mechatronics Engineering
Acceleration slip regulation EE495
SUBMMITTED BY: Abdulmajid Idris (20176535)
SUBMMITTED TO: Prof. Dr. Parvaneh Esmaili
NICOSIA 2020
pg. 1
Faculty of Engineering
Mechatronics department
Faculty of Engineering
Department of Mechatronics Engineering
Acceleration slip regulation EE495
SUBMMITTED BY: Abdulmajid Idris (20176535)
SUBMMITTED TO: Prof. Dr. Parvaneh Esmaili
NICOSIA 2020
pg. 1
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Abstract:
In my research This Will Provide the Acceleration Slip
Regulation. On electric cars with an independent front-wheel drive.
What is the regulation of acceleration slip (ASR)? If the vehicle is
going on slippery roads and the engine gives more power than
necessary, the regulation of the acceleration slip controls the
torque or prevents the over rotation that leads to sliding of the
vehicle, which is similar to the ABS system, as the ABS system
equals the speed of the wheels in case of slipping or in high speed
turns which is control the traction [1]. And the process of sliding
strategy simulations using the MATLAB[2].
Keyword: acceleration slip regulation, yaw rate.
pg. 2
In my research This Will Provide the Acceleration Slip
Regulation. On electric cars with an independent front-wheel drive.
What is the regulation of acceleration slip (ASR)? If the vehicle is
going on slippery roads and the engine gives more power than
necessary, the regulation of the acceleration slip controls the
torque or prevents the over rotation that leads to sliding of the
vehicle, which is similar to the ABS system, as the ABS system
equals the speed of the wheels in case of slipping or in high speed
turns which is control the traction [1]. And the process of sliding
strategy simulations using the MATLAB[2].
Keyword: acceleration slip regulation, yaw rate.
pg. 2
Table of content:
Abstract ..……………………………………………………………….2
Table of content ..……………………………………………………...3
1.0 Introduction ...………………………………………………………4
2.0 Some of the applications for acceleration slip regulation .........5
2.1 was in Corvette cars in 1992 ...………………………………...5
2.2 Mercedes Benz in 1994 ...…………………………………...5-6
3.0 Acceleration slip control ……………….………………………….7
4.0 Slippage control ...…………………………………………………7
5.0 Dynamic electric vehicles (EVs) design ………………………7-8
6.0 (VCU) system ..………………………………………………….8-9
7.0 mathematical calculations ……………………………………9-11
8.0 Design of project ...………………………………………………11
9.0 Advantages and Disadvantages ……………………………… 12
10.0 Recent achievement ...…………………………………………13
11.0 Discussion ...…………………………………………………….14
12.0 Conclusion ..…………………………………………………….15
13.0 References ...……………………………………………………16
pg. 3
Abstract ..……………………………………………………………….2
Table of content ..……………………………………………………...3
1.0 Introduction ...………………………………………………………4
2.0 Some of the applications for acceleration slip regulation .........5
2.1 was in Corvette cars in 1992 ...………………………………...5
2.2 Mercedes Benz in 1994 ...…………………………………...5-6
3.0 Acceleration slip control ……………….………………………….7
4.0 Slippage control ...…………………………………………………7
5.0 Dynamic electric vehicles (EVs) design ………………………7-8
6.0 (VCU) system ..………………………………………………….8-9
7.0 mathematical calculations ……………………………………9-11
8.0 Design of project ...………………………………………………11
9.0 Advantages and Disadvantages ……………………………… 12
10.0 Recent achievement ...…………………………………………13
11.0 Discussion ...…………………………………………………….14
12.0 Conclusion ..…………………………………………………….15
13.0 References ...……………………………………………………16
pg. 3
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1.0 Introduction:
Why were electric cars made in first place? Electric cars helped to
develop technically and environmentally in terms of environmental
conservation, and were a good embrace of the economy. It is a
good technical transition in the automotive world[2]. To achieve
safety when driving, especially for sports vehicles that can go at
great speed, the vehicles have been equipped with an acceleration
slip strategy. It depends on controlling the yaw rate and taking
advantage of the grip of the road.
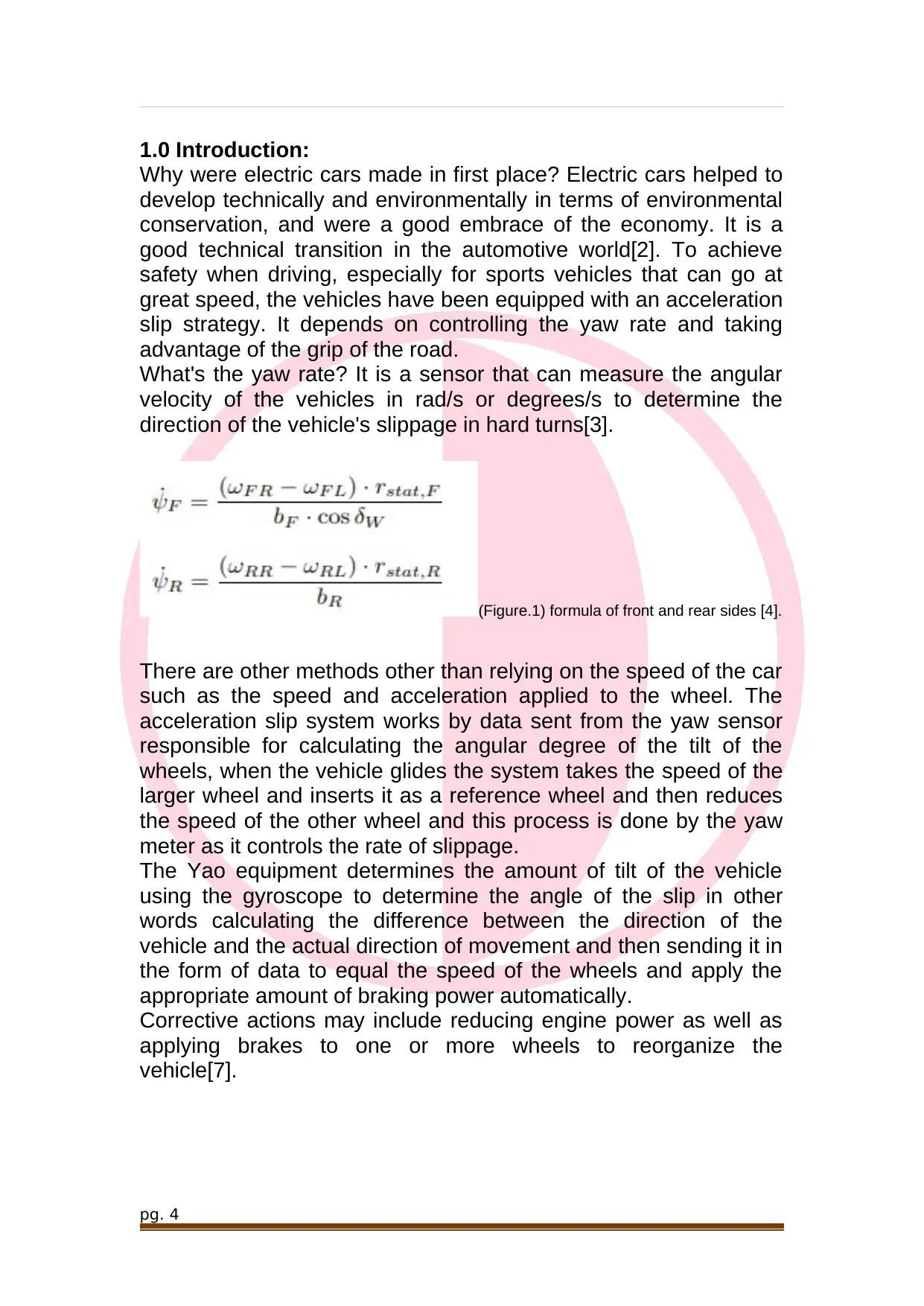
What's the yaw rate? It is a sensor that can measure the angular
velocity of the vehicles in rad/s or degrees/s to determine the
direction of the vehicle's slippage in hard turns[3].
(Figure.1) formula of front and rear sides [4].
There are other methods other than relying on the speed of the car
such as the speed and acceleration applied to the wheel. The
acceleration slip system works by data sent from the yaw sensor
responsible for calculating the angular degree of the tilt of the
wheels, when the vehicle glides the system takes the speed of the
larger wheel and inserts it as a reference wheel and then reduces
the speed of the other wheel and this process is done by the yaw
meter as it controls the rate of slippage.
The Yao equipment determines the amount of tilt of the vehicle
using the gyroscope to determine the angle of the slip in other
words calculating the difference between the direction of the
vehicle and the actual direction of movement and then sending it in
the form of data to equal the speed of the wheels and apply the
appropriate amount of braking power automatically.
Corrective actions may include reducing engine power as well as
applying brakes to one or more wheels to reorganize the
vehicle[7].
pg. 4
Why were electric cars made in first place? Electric cars helped to
develop technically and environmentally in terms of environmental
conservation, and were a good embrace of the economy. It is a
good technical transition in the automotive world[2]. To achieve
safety when driving, especially for sports vehicles that can go at
great speed, the vehicles have been equipped with an acceleration
slip strategy. It depends on controlling the yaw rate and taking
advantage of the grip of the road.
What's the yaw rate? It is a sensor that can measure the angular
velocity of the vehicles in rad/s or degrees/s to determine the
direction of the vehicle's slippage in hard turns[3].
(Figure.1) formula of front and rear sides [4].
There are other methods other than relying on the speed of the car
such as the speed and acceleration applied to the wheel. The
acceleration slip system works by data sent from the yaw sensor
responsible for calculating the angular degree of the tilt of the
wheels, when the vehicle glides the system takes the speed of the
larger wheel and inserts it as a reference wheel and then reduces
the speed of the other wheel and this process is done by the yaw
meter as it controls the rate of slippage.
The Yao equipment determines the amount of tilt of the vehicle
using the gyroscope to determine the angle of the slip in other
words calculating the difference between the direction of the
vehicle and the actual direction of movement and then sending it in
the form of data to equal the speed of the wheels and apply the
appropriate amount of braking power automatically.
Corrective actions may include reducing engine power as well as
applying brakes to one or more wheels to reorganize the
vehicle[7].
pg. 4
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
2.0 Some of the applications for acceleration slip regulation:
2.1 was in Corvette cars in 1992
ASR and ABS were added to the Corvettes that year, and I
noticed that their cars have become more stable and able to whip
and force the car to stay on the line during the strong braking. She
had the most difficult challenge of controlling the car while
accelerating and remaining in a state of stability and its goal was to
help the driver take advantage of the full power of the vehicle, as
well as for sports cars while walking on the wrong surfaces. The
goal was to have the system able to control the torque of the rotors
in the engine with the estimated intensity of the brake.
This system requires three subsystems:
Engine spark delayed, throttle close, and brakes. It enables throttle
to be shut down in slippery roads that is the first application.
Bosch's control procedures, modified in Corvette Engineering's
electronic control-unit, have empowered vehicle quickening and
solidness to be upgraded on an assortment of roads surfaces
under troublesome driving conditions. These control
methodologies have been additionally improved to give adjusted
driving execution to the encompassing winter, summer, winter, and
spring conditions[8].
2.2 Mercedes Benz in 1994[10].
Was also one of the first company in 1994 that use the
acceleration slip regulation (ASR) strategy with Robert Bosch.
Mercedes-Benz was also one of the first companies to supply its
vehicles with the front-wheel drive system and rear-wheel drive
system with traction, and has provided many VERSIONS of the
ASR since then with ESP, a system called electronic stability
protection.
ASR: The first and second were not able to self-diagnose, then
many cars failed their systems and this failure caused problems as
users brought them to repair. In addition, the second version of the
slip acceleration was complex, which caused the failure of the
most experienced major techniques.
pg. 5
2.1 was in Corvette cars in 1992
ASR and ABS were added to the Corvettes that year, and I
noticed that their cars have become more stable and able to whip
and force the car to stay on the line during the strong braking. She
had the most difficult challenge of controlling the car while
accelerating and remaining in a state of stability and its goal was to
help the driver take advantage of the full power of the vehicle, as
well as for sports cars while walking on the wrong surfaces. The
goal was to have the system able to control the torque of the rotors
in the engine with the estimated intensity of the brake.
This system requires three subsystems:
Engine spark delayed, throttle close, and brakes. It enables throttle
to be shut down in slippery roads that is the first application.
Bosch's control procedures, modified in Corvette Engineering's
electronic control-unit, have empowered vehicle quickening and
solidness to be upgraded on an assortment of roads surfaces
under troublesome driving conditions. These control
methodologies have been additionally improved to give adjusted
driving execution to the encompassing winter, summer, winter, and
spring conditions[8].
2.2 Mercedes Benz in 1994[10].
Was also one of the first company in 1994 that use the
acceleration slip regulation (ASR) strategy with Robert Bosch.
Mercedes-Benz was also one of the first companies to supply its
vehicles with the front-wheel drive system and rear-wheel drive
system with traction, and has provided many VERSIONS of the
ASR since then with ESP, a system called electronic stability
protection.
ASR: The first and second were not able to self-diagnose, then
many cars failed their systems and this failure caused problems as
users brought them to repair. In addition, the second version of the
slip acceleration was complex, which caused the failure of the
most experienced major techniques.
pg. 5
ASR II consolidates ABS's electronic and hydraulic with speed
control and idle speed control. ASR can apply brakes in the back
wheel exclusively to empower differential locking impact and
control the choke also to forestall sliding wheels.
In the 1992 500SL there was a problem that the warning light for
the malfunction of the ASR (MIL) the throttle was in limp mode.
And in this mode the ASR is disrupt as it disconnects the throttle
and the accelerator and if connection is interrupted produces a
loss of power as the spatial connection saves 30% of the braking it
does not accelerate.
legitimately, the technician began by investigating the car throttle
control parts of the ASR II framework. These comprise a choke
potentiometer (R.25) and the drive engine (M.16) that speak with
the Electronic Accelerator, Cruise Control, Idle Speed Control (EA,
CC, ISC) and the ABS, ASR control modules. The professional
had ensured the R25 was getting its legitimate 7.2 V reference
voltage. technician checked a low voltage dropped on the ground
circuit and a decent voltage clear on the sensor yield.
Specs: 0.59 V at shut the car throttle to 6.5 V at wide open throttle
(WOT)[10].
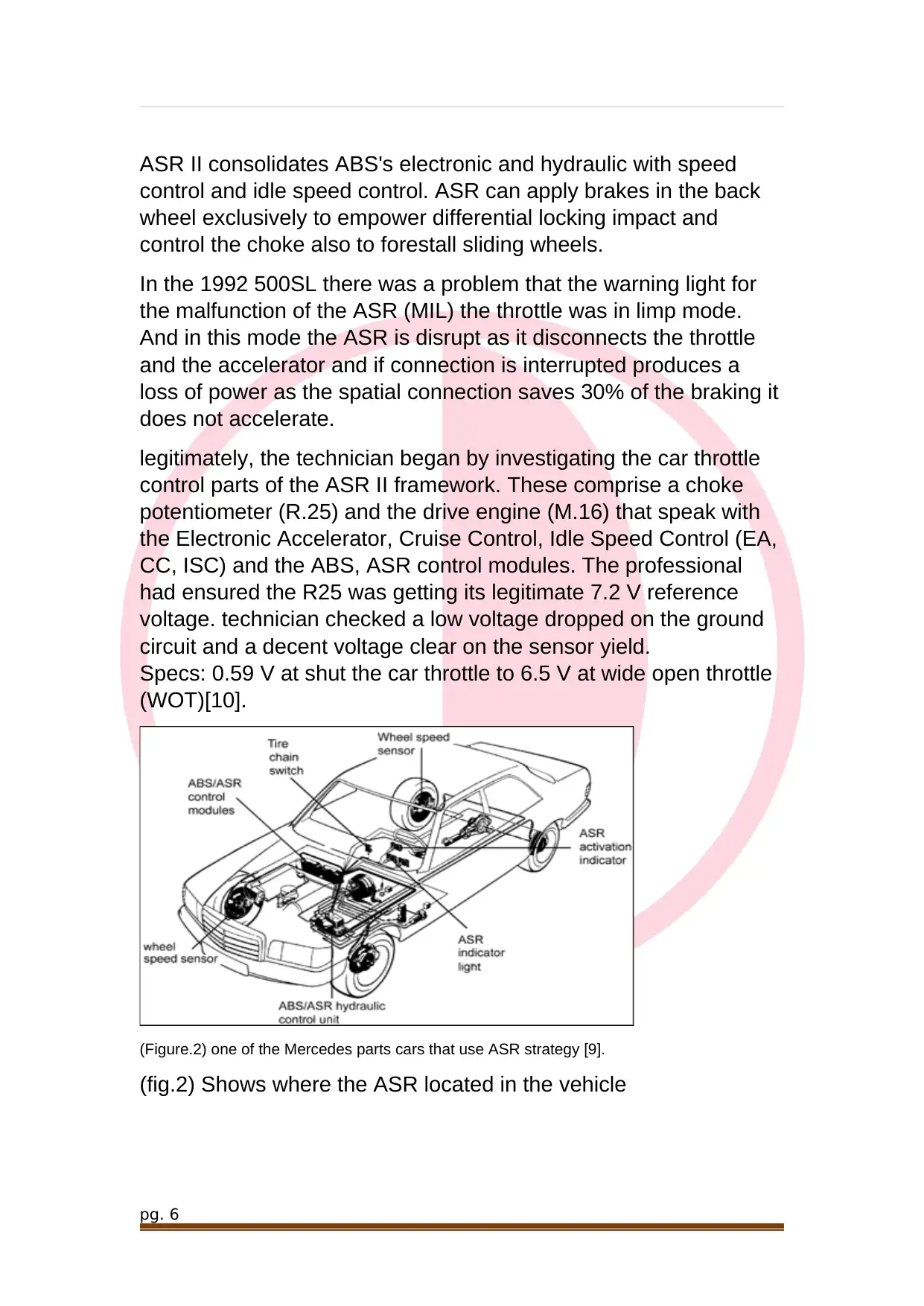
(Figure.2) one of the Mercedes parts cars that use ASR strategy [9].
(fig.2) Shows where the ASR located in the vehicle
pg. 6
control and idle speed control. ASR can apply brakes in the back
wheel exclusively to empower differential locking impact and
control the choke also to forestall sliding wheels.
In the 1992 500SL there was a problem that the warning light for
the malfunction of the ASR (MIL) the throttle was in limp mode.
And in this mode the ASR is disrupt as it disconnects the throttle
and the accelerator and if connection is interrupted produces a
loss of power as the spatial connection saves 30% of the braking it
does not accelerate.
legitimately, the technician began by investigating the car throttle
control parts of the ASR II framework. These comprise a choke
potentiometer (R.25) and the drive engine (M.16) that speak with
the Electronic Accelerator, Cruise Control, Idle Speed Control (EA,
CC, ISC) and the ABS, ASR control modules. The professional
had ensured the R25 was getting its legitimate 7.2 V reference
voltage. technician checked a low voltage dropped on the ground
circuit and a decent voltage clear on the sensor yield.
Specs: 0.59 V at shut the car throttle to 6.5 V at wide open throttle
(WOT)[10].
(Figure.2) one of the Mercedes parts cars that use ASR strategy [9].
(fig.2) Shows where the ASR located in the vehicle
pg. 6
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
3.0 Acceleration slip control:
ASR is simply reducing the engine power when break traction
with one of the wheels lost rudimentary in traction control. there is
excessive rotation of the wheel when friction on the wheels
decreases if the engine torque exceeds torque, then the vehicle's
stability will decrease and slide. If we want to control this slide, the
best way is to control the slippage ratio, measure the speed of the
car and the acceleration of the car, measured by the vehicle's
speed sensors. However, if the engines are isolated, the
characteristics of the response change, as each engine has a
different torque, and the yaw rate becomes different, what
distinguishes electric vehicles is their ability to control the yaw rate.
4.0 Slippage control:
Slipping control aims to take advantage of the grip of the road
different relationships between the embroidered driving force
encircled μ is equal to Fx over Fz and the ratio of slippage λ.
Burkhardt made his way to describe the characteristics of the road.
μ(λ)=c1(1−e−c2λ)−c3λ
The rate can vary depending on the road on which this car is
going, such as changes in if the road is rainy, iced, etc., And each
of these factors has a certain percentage and a different yaw rate.
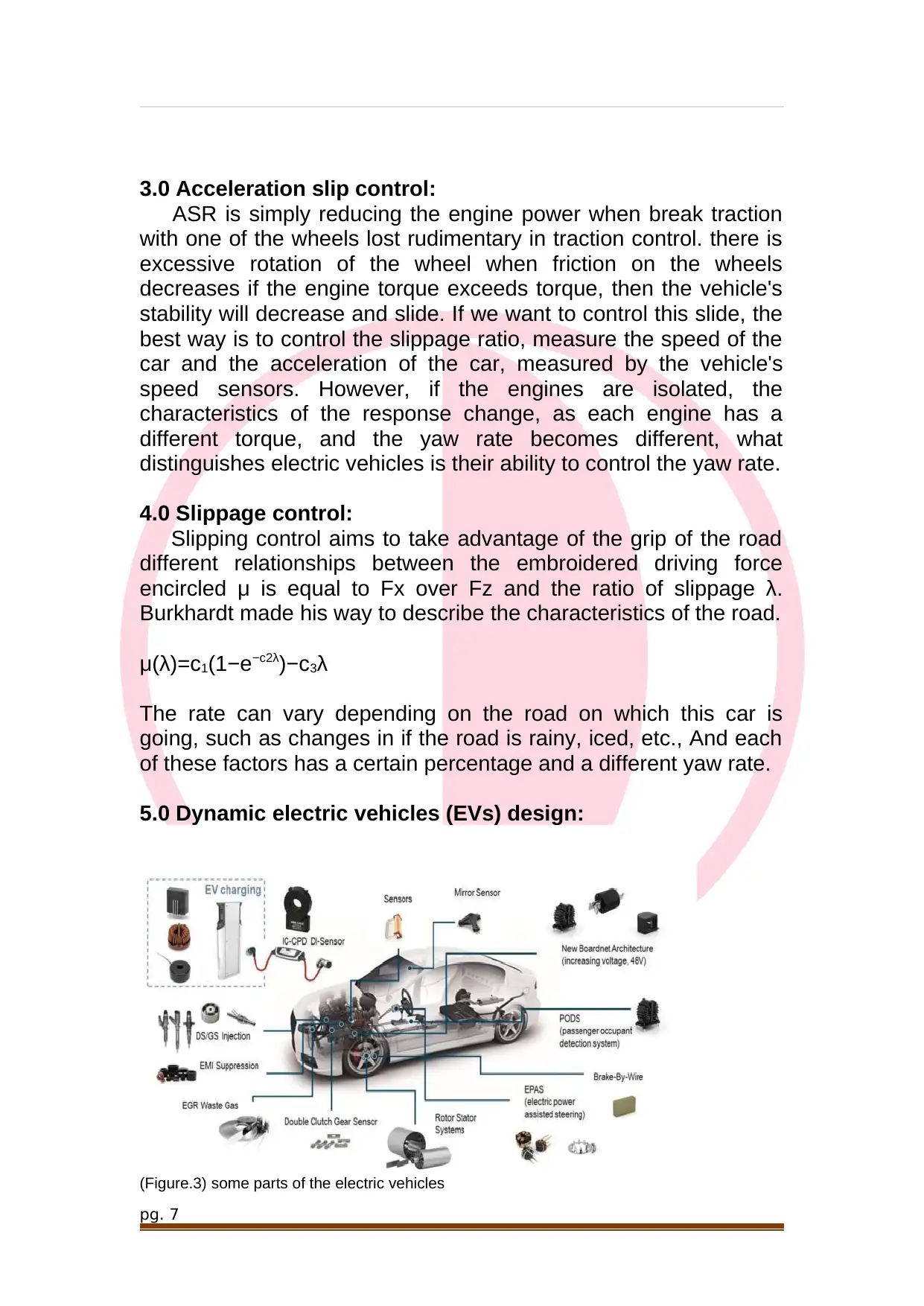
5.0 Dynamic electric vehicles (EVs) design:
(Figure.3) some parts of the electric vehicles
pg. 7
ASR is simply reducing the engine power when break traction
with one of the wheels lost rudimentary in traction control. there is
excessive rotation of the wheel when friction on the wheels
decreases if the engine torque exceeds torque, then the vehicle's
stability will decrease and slide. If we want to control this slide, the
best way is to control the slippage ratio, measure the speed of the
car and the acceleration of the car, measured by the vehicle's
speed sensors. However, if the engines are isolated, the
characteristics of the response change, as each engine has a
different torque, and the yaw rate becomes different, what
distinguishes electric vehicles is their ability to control the yaw rate.
4.0 Slippage control:
Slipping control aims to take advantage of the grip of the road
different relationships between the embroidered driving force
encircled μ is equal to Fx over Fz and the ratio of slippage λ.
Burkhardt made his way to describe the characteristics of the road.
μ(λ)=c1(1−e−c2λ)−c3λ
The rate can vary depending on the road on which this car is
going, such as changes in if the road is rainy, iced, etc., And each
of these factors has a certain percentage and a different yaw rate.
5.0 Dynamic electric vehicles (EVs) design:
(Figure.3) some parts of the electric vehicles
pg. 7
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
As shown in (fig.3)[6] the electric vehicle includes:
1. sensors ( double clutch gear sensor, mirror sensor, IC-CPD DI-
Sensor(which is responsible for charging the vehicle), and engine
sensors).
2. systems ( rotor stator system, and (PODS) passenger occupant
detection system)
3. Brake by wire
4. yaw rate sensor (NOT SHOWN ON A FIG.2) yaw rate located
under the driver[7] which is acceleration slip depends on it.
5. EPAS (electric power assisted sheering), EGR waste gas, EMI
suppression, and DS/GS injection.
6. New Broadnet Architecture.
6.0 (VCU) system:
The vehicles have unit called Vehicle Control Unit (VCU) this unit
identify the state of the wheels if it spins excessively and activate
the acceleration slip strategy.
This process is achieved when signals are sent to VCU from the
accelerator, wheel speeds, yaw rate and from the sensors. Then
calculate the slip ratio with sliding ratio information. If the
acceleration coupon is activated, the sliding ratio will be controlled
at work, and the engines will be controlled by controlling the
slippage ratio as shown in (Figure.6) below. If the car is still in
normal driving conditions, there is no need to complete this
operation, because there is no slippage.
pg. 8
1. sensors ( double clutch gear sensor, mirror sensor, IC-CPD DI-
Sensor(which is responsible for charging the vehicle), and engine
sensors).
2. systems ( rotor stator system, and (PODS) passenger occupant
detection system)
3. Brake by wire
4. yaw rate sensor (NOT SHOWN ON A FIG.2) yaw rate located
under the driver[7] which is acceleration slip depends on it.
5. EPAS (electric power assisted sheering), EGR waste gas, EMI
suppression, and DS/GS injection.
6. New Broadnet Architecture.
6.0 (VCU) system:
The vehicles have unit called Vehicle Control Unit (VCU) this unit
identify the state of the wheels if it spins excessively and activate
the acceleration slip strategy.
This process is achieved when signals are sent to VCU from the
accelerator, wheel speeds, yaw rate and from the sensors. Then
calculate the slip ratio with sliding ratio information. If the
acceleration coupon is activated, the sliding ratio will be controlled
at work, and the engines will be controlled by controlling the
slippage ratio as shown in (Figure.6) below. If the car is still in
normal driving conditions, there is no need to complete this
operation, because there is no slippage.
pg. 8
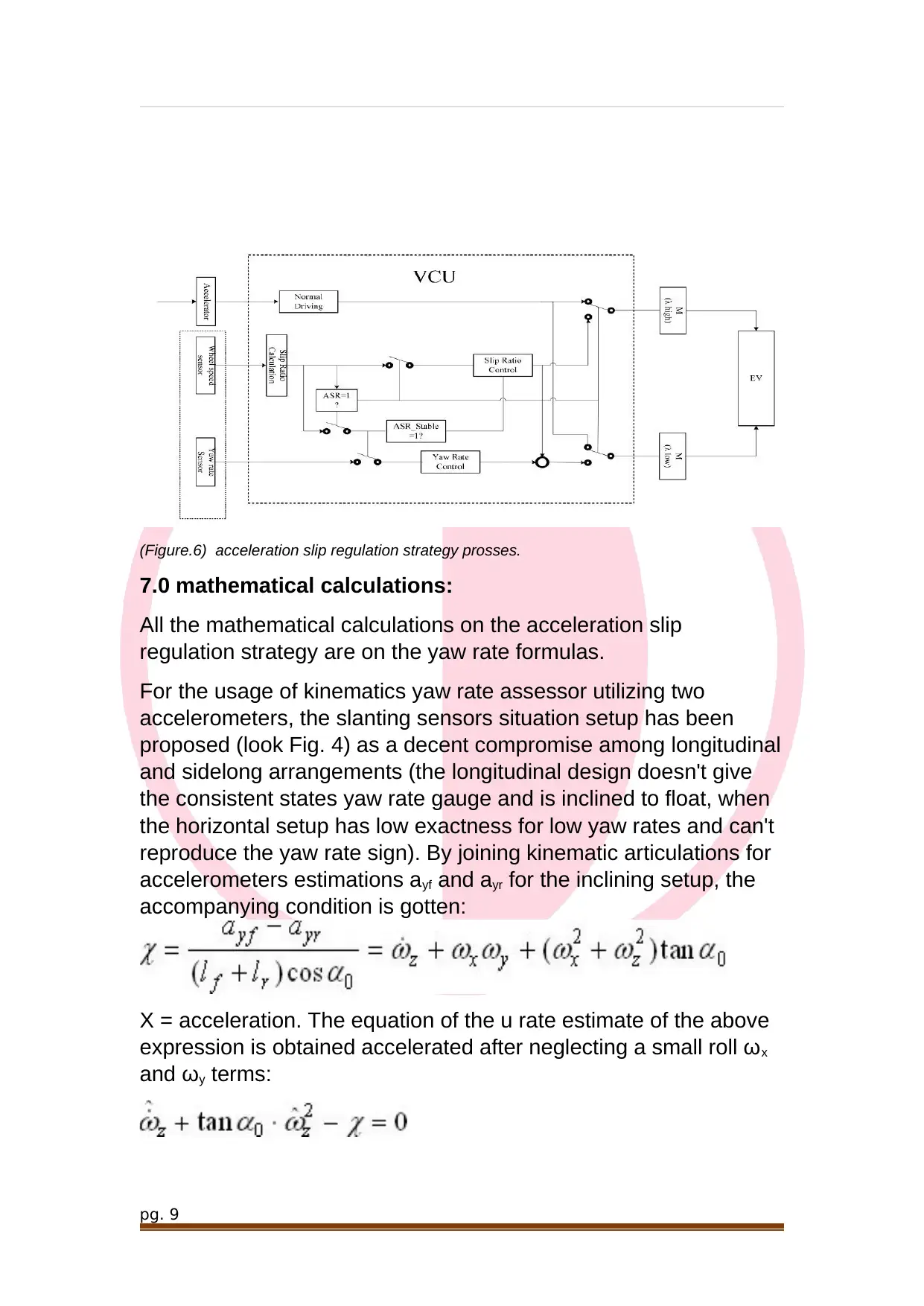
(Figure.6) acceleration slip regulation strategy prosses.
7.0 mathematical calculations:
All the mathematical calculations on the acceleration slip
regulation strategy are on the yaw rate formulas.
For the usage of kinematics yaw rate assessor utilizing two
accelerometers, the slanting sensors situation setup has been
proposed (look Fig. 4) as a decent compromise among longitudinal
and sidelong arrangements (the longitudinal design doesn't give
the consistent states yaw rate gauge and is inclined to float, when
the horizontal setup has low exactness for low yaw rates and can't
reproduce the yaw rate sign). By joining kinematic articulations for
accelerometers estimations ayf and ayr for the inclining setup, the
accompanying condition is gotten:
X = acceleration. The equation of the u rate estimate of the above
expression is obtained accelerated after neglecting a small roll ωx
and ωy terms:
pg. 9
7.0 mathematical calculations:
All the mathematical calculations on the acceleration slip
regulation strategy are on the yaw rate formulas.
For the usage of kinematics yaw rate assessor utilizing two
accelerometers, the slanting sensors situation setup has been
proposed (look Fig. 4) as a decent compromise among longitudinal
and sidelong arrangements (the longitudinal design doesn't give
the consistent states yaw rate gauge and is inclined to float, when
the horizontal setup has low exactness for low yaw rates and can't
reproduce the yaw rate sign). By joining kinematic articulations for
accelerometers estimations ayf and ayr for the inclining setup, the
accompanying condition is gotten:
X = acceleration. The equation of the u rate estimate of the above
expression is obtained accelerated after neglecting a small roll ωx
and ωy terms:
pg. 9
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
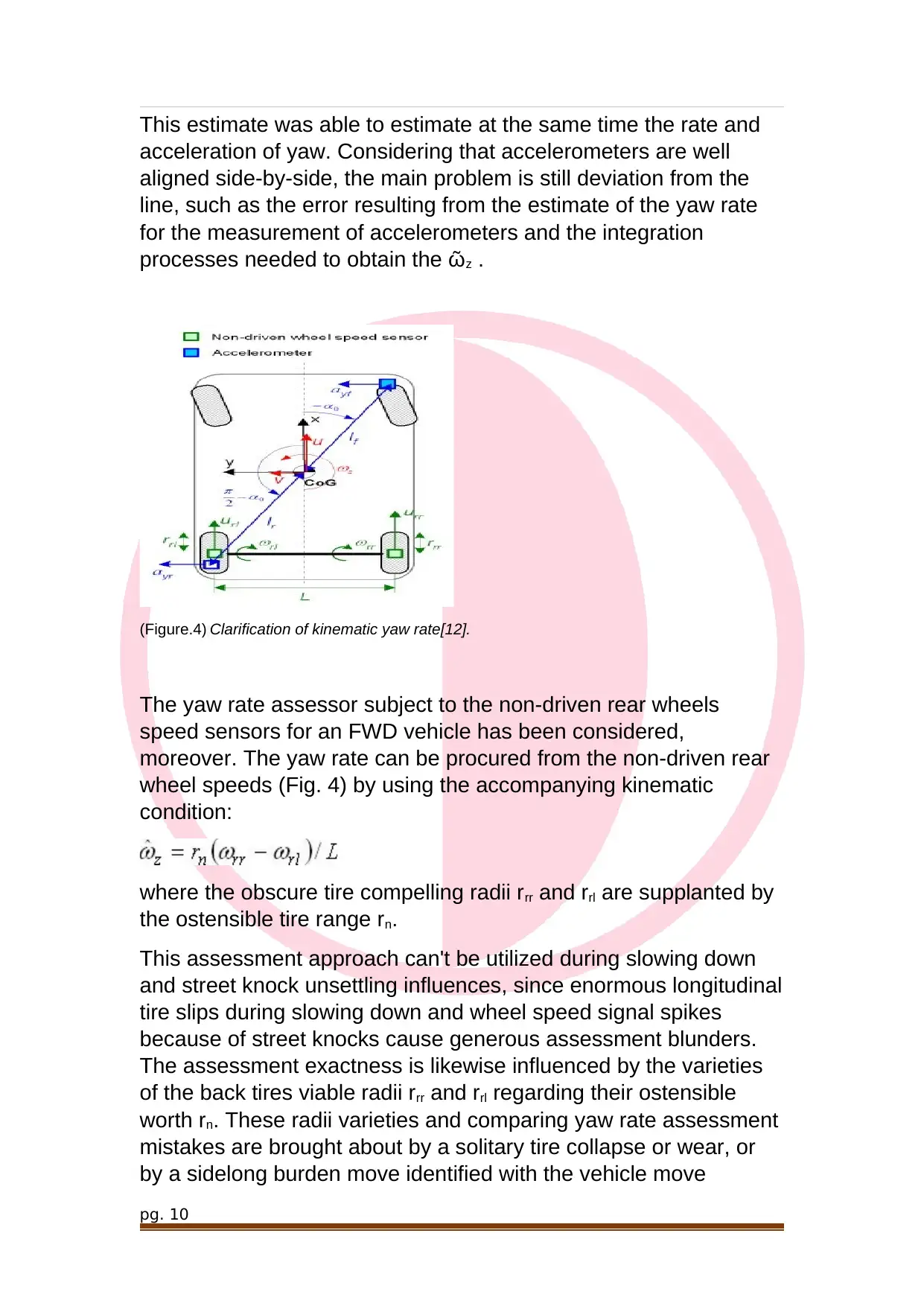
This estimate was able to estimate at the same time the rate and
acceleration of yaw. Considering that accelerometers are well
aligned side-by-side, the main problem is still deviation from the
line, such as the error resulting from the estimate of the yaw rate
for the measurement of accelerometers and the integration
processes needed to obtain the ῶz .
(Figure.4) Clarification of kinematic yaw rate[12].
The yaw rate assessor subject to the non-driven rear wheels
speed sensors for an FWD vehicle has been considered,
moreover. The yaw rate can be procured from the non-driven rear
wheel speeds (Fig. 4) by using the accompanying kinematic
condition:
where the obscure tire compelling radii rrr and rrl are supplanted by
the ostensible tire range rn.
This assessment approach can't be utilized during slowing down
and street knock unsettling influences, since enormous longitudinal
tire slips during slowing down and wheel speed signal spikes
because of street knocks cause generous assessment blunders.
The assessment exactness is likewise influenced by the varieties
of the back tires viable radii rrr and rrl regarding their ostensible
worth rn. These radii varieties and comparing yaw rate assessment
mistakes are brought about by a solitary tire collapse or wear, or
by a sidelong burden move identified with the vehicle move
pg. 10
acceleration of yaw. Considering that accelerometers are well
aligned side-by-side, the main problem is still deviation from the
line, such as the error resulting from the estimate of the yaw rate
for the measurement of accelerometers and the integration
processes needed to obtain the ῶz .
(Figure.4) Clarification of kinematic yaw rate[12].
The yaw rate assessor subject to the non-driven rear wheels
speed sensors for an FWD vehicle has been considered,
moreover. The yaw rate can be procured from the non-driven rear
wheel speeds (Fig. 4) by using the accompanying kinematic
condition:
where the obscure tire compelling radii rrr and rrl are supplanted by
the ostensible tire range rn.
This assessment approach can't be utilized during slowing down
and street knock unsettling influences, since enormous longitudinal
tire slips during slowing down and wheel speed signal spikes
because of street knocks cause generous assessment blunders.
The assessment exactness is likewise influenced by the varieties
of the back tires viable radii rrr and rrl regarding their ostensible
worth rn. These radii varieties and comparing yaw rate assessment
mistakes are brought about by a solitary tire collapse or wear, or
by a sidelong burden move identified with the vehicle move
pg. 10
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
movement or potentially to the street bank point. These blunders,
not at all like the mistakes identified with slowing down and street
aggravations, can be altogether diminished by using
straightforward vehicle model-based pay schedules [11].
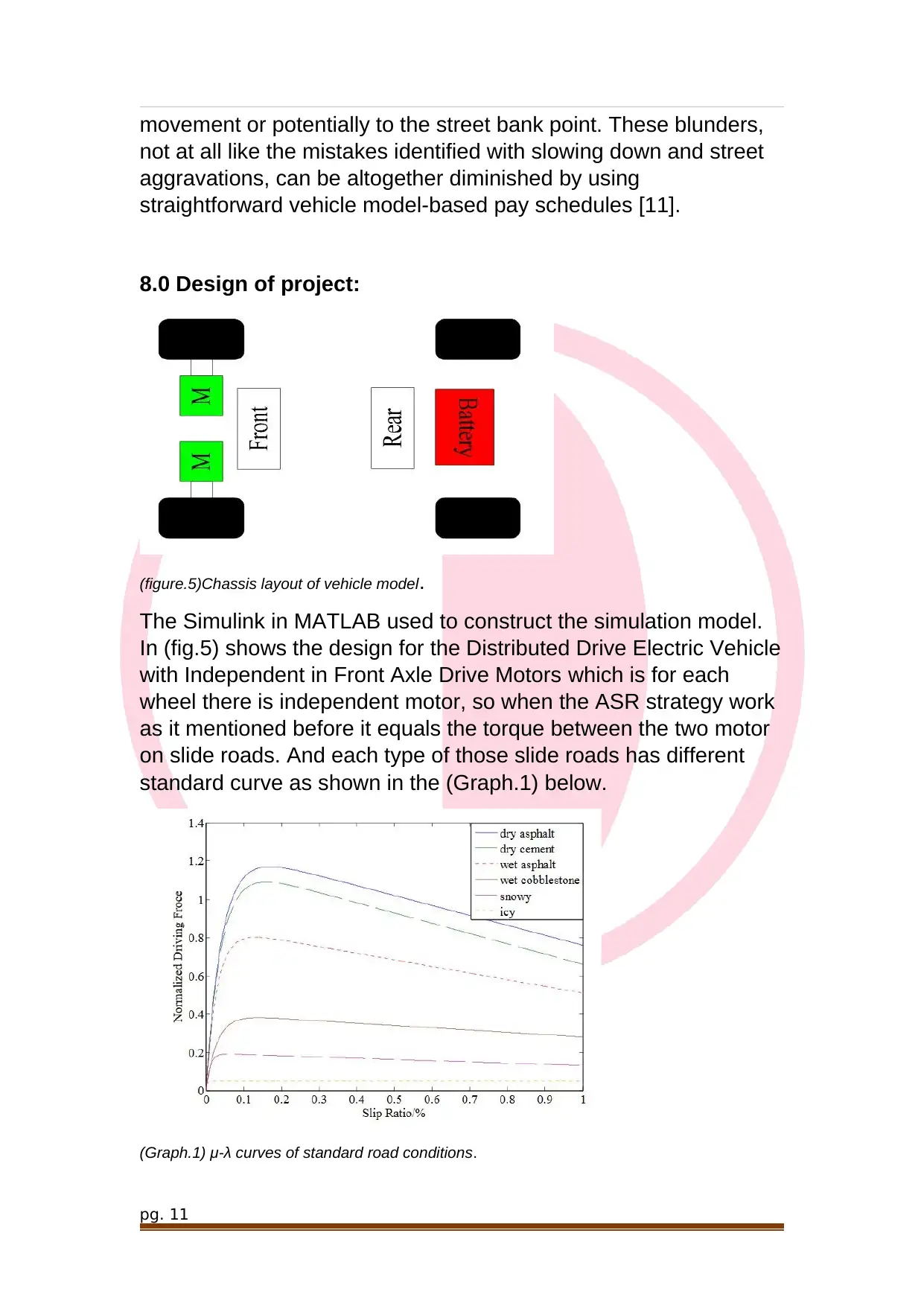
8.0 Design of project:
(figure.5)Chassis layout of vehicle model.
The Simulink in MATLAB used to construct the simulation model.
In (fig.5) shows the design for the Distributed Drive Electric Vehicle
with Independent in Front Axle Drive Motors which is for each
wheel there is independent motor, so when the ASR strategy work
as it mentioned before it equals the torque between the two motor
on slide roads. And each type of those slide roads has different
standard curve as shown in the (Graph.1) below.
(Graph.1) μ-λ curves of standard road conditions.
pg. 11
not at all like the mistakes identified with slowing down and street
aggravations, can be altogether diminished by using
straightforward vehicle model-based pay schedules [11].
8.0 Design of project:
(figure.5)Chassis layout of vehicle model.
The Simulink in MATLAB used to construct the simulation model.
In (fig.5) shows the design for the Distributed Drive Electric Vehicle
with Independent in Front Axle Drive Motors which is for each
wheel there is independent motor, so when the ASR strategy work
as it mentioned before it equals the torque between the two motor
on slide roads. And each type of those slide roads has different
standard curve as shown in the (Graph.1) below.
(Graph.1) μ-λ curves of standard road conditions.
pg. 11
9.0 Advantages and Disadvantages:
What are the advantages of ASR?
1. It reduces the damage to the wheels and so falls under the
economic advantage in maintaining the life of the tires.
2. Increases the resources of the engine and this feature can make
the engine stronger.
3. Gives reliability to drive safer on wet surfaces and in winter and
other factors affecting the balance of the vehicle from what makes
this type of vehicle distinctive.
4. Provides the reliability of the road grip when vehicles begin to
move on a wet, snowy or icy surface, as the balance here is
higher.
5. Oil also preserves this advantage as an economic advantage for
the preservation of the environment.
6. Increase maneuverability and fast engine of the sports car and
also more stable on turns[5].
But as we know any system can have drawbacks.
ASR defects:
1. The car does not have complete traffic control of the system, as
the drivers noted.
2. In some cases the engine does not work as expected and
reduces performance but this problem improves with further
development[5].
pg. 12
What are the advantages of ASR?
1. It reduces the damage to the wheels and so falls under the
economic advantage in maintaining the life of the tires.
2. Increases the resources of the engine and this feature can make
the engine stronger.
3. Gives reliability to drive safer on wet surfaces and in winter and
other factors affecting the balance of the vehicle from what makes
this type of vehicle distinctive.
4. Provides the reliability of the road grip when vehicles begin to
move on a wet, snowy or icy surface, as the balance here is
higher.
5. Oil also preserves this advantage as an economic advantage for
the preservation of the environment.
6. Increase maneuverability and fast engine of the sports car and
also more stable on turns[5].
But as we know any system can have drawbacks.
ASR defects:
1. The car does not have complete traffic control of the system, as
the drivers noted.
2. In some cases the engine does not work as expected and
reduces performance but this problem improves with further
development[5].
pg. 12
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 16
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.