EE Assignment: Circuit Analysis, Calculus, and Amplifier Design
VerifiedAdded on 2023/04/23
|17
|1896
|367
Homework Assignment
AI Summary
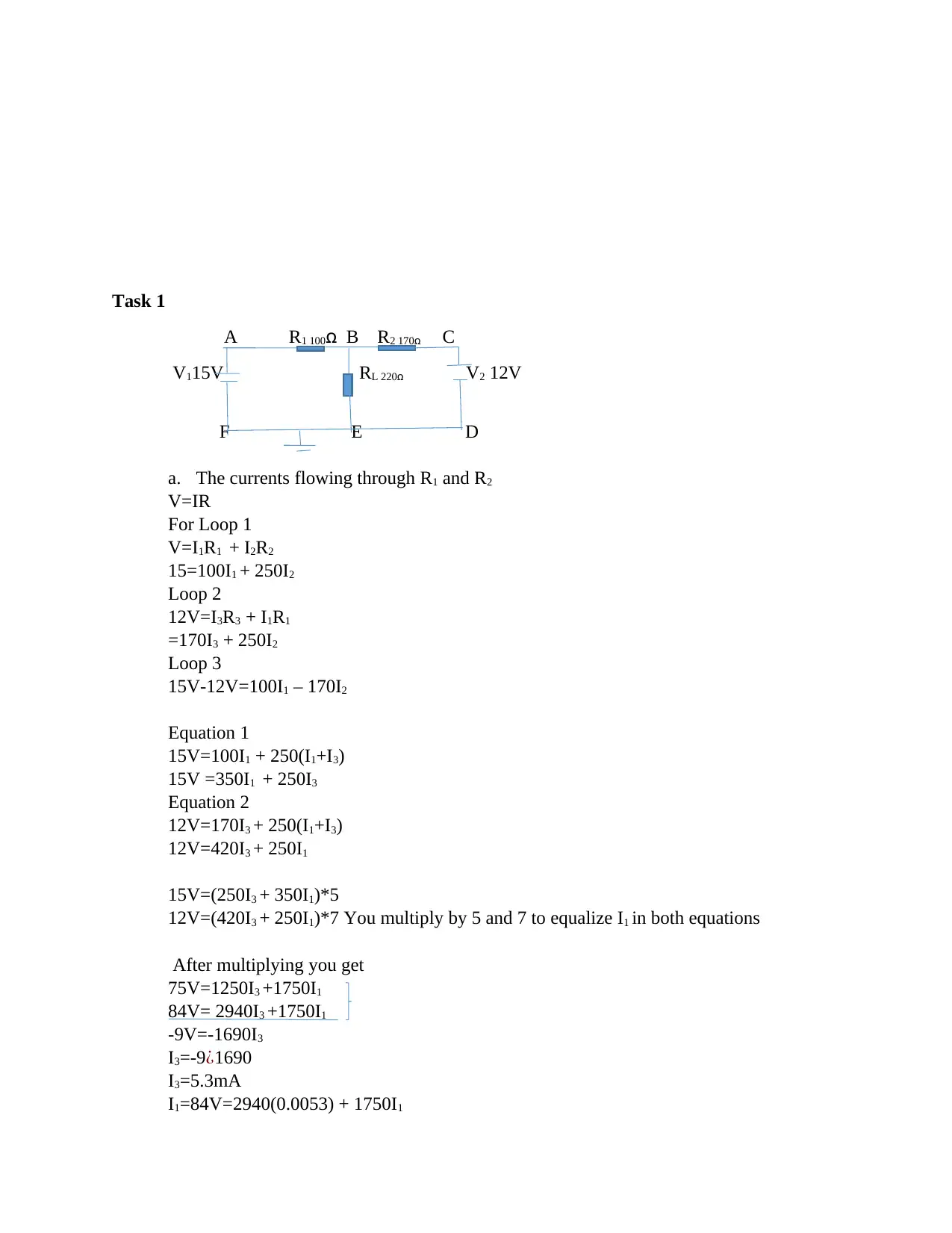
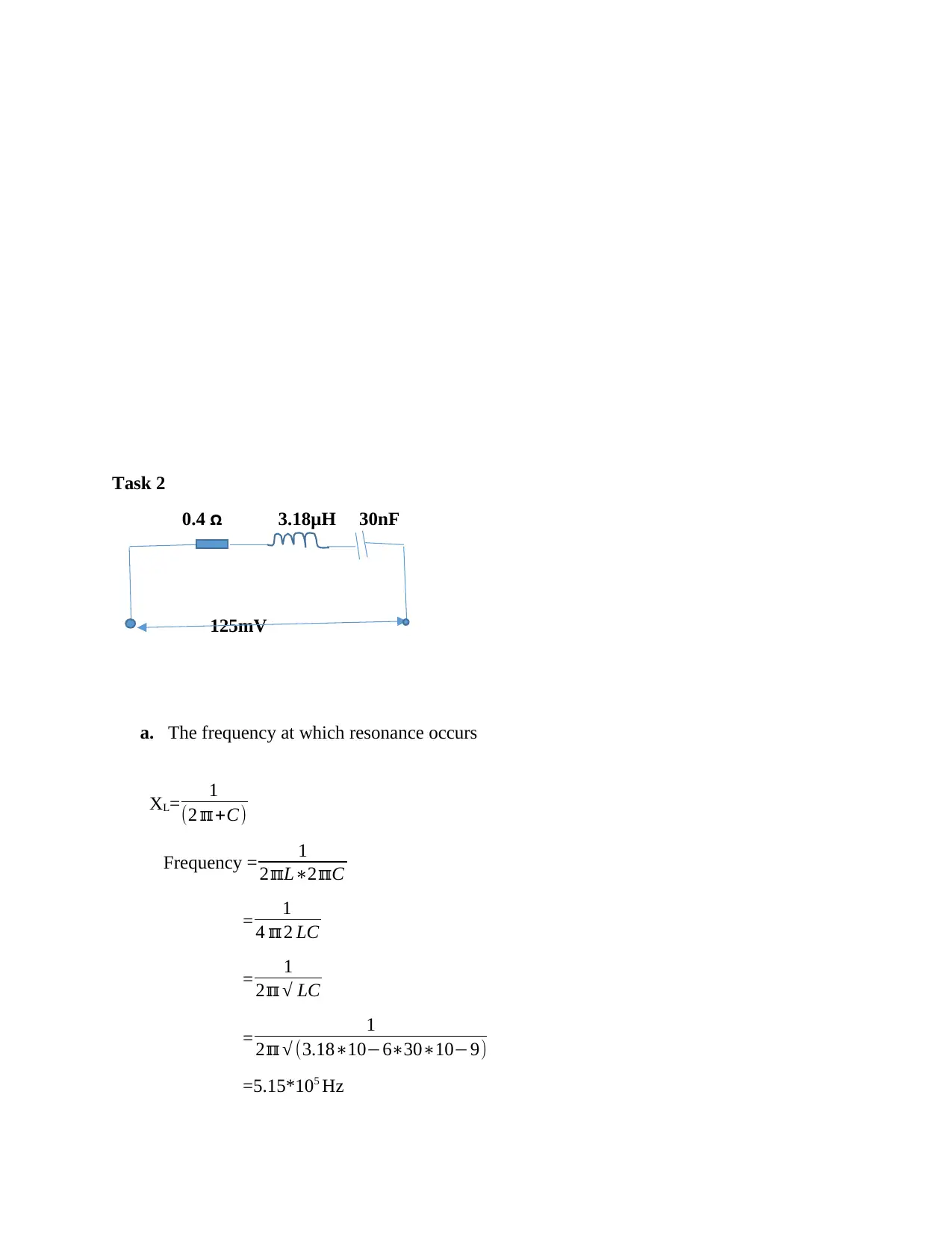
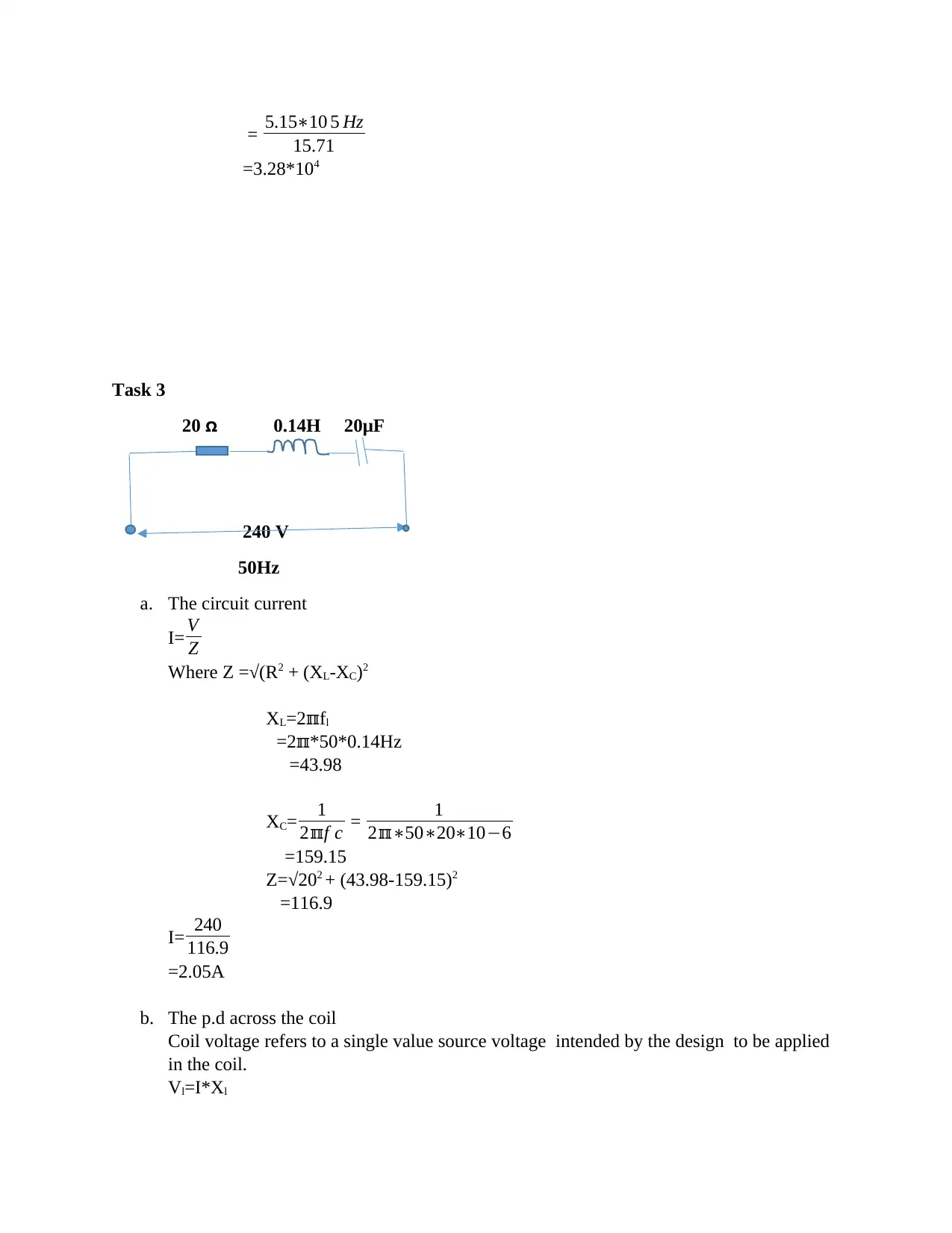
This document provides a detailed solution to an Electrical Engineering assignment. The assignment covers a wide range of topics including circuit analysis, calculus, and amplifier design. The solution begins with calculations of currents, voltages, and power in various circuits, applying Ohm's law and circuit analysis techniques. It then delves into resonance, calculating frequency, Q factor, and circuit current. Further, the assignment investigates AC circuits, calculating impedance, current, and power factor. Additionally, it covers amplifier analysis, calculating voltage and current gains, and overall power gain. The solution also includes analysis of thermocouples and analog-to-digital converters. Finally, it explores control systems, including damping and transfer functions, as well as calculus problems involving derivatives and integrals. The assignment concludes with a bibliography of relevant sources.

1 out of 17

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.