Electrotechnology Project: Water Level Controller System - 2017
VerifiedAdded on 2020/02/24
|9
|1278
|758
Project
AI Summary
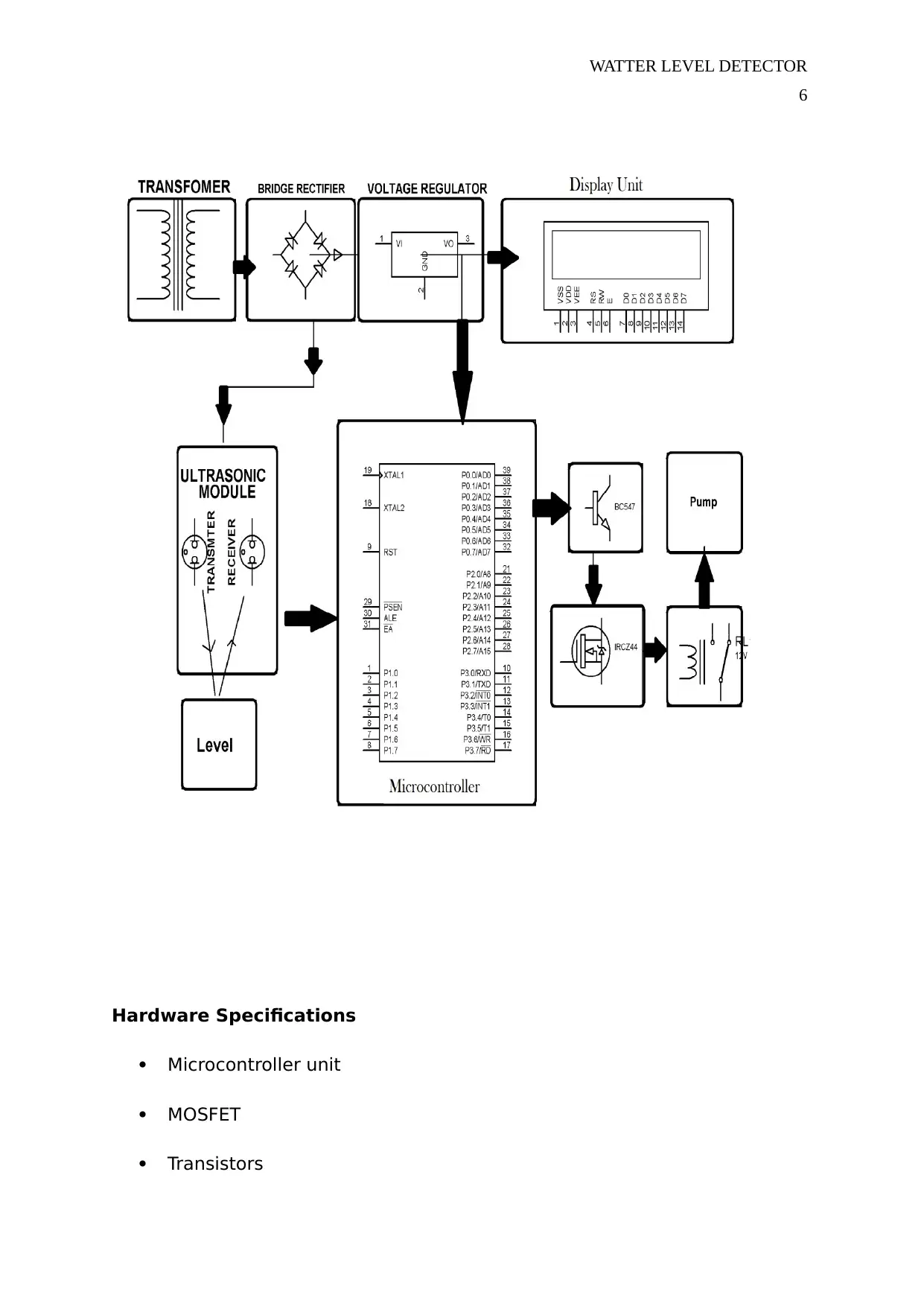
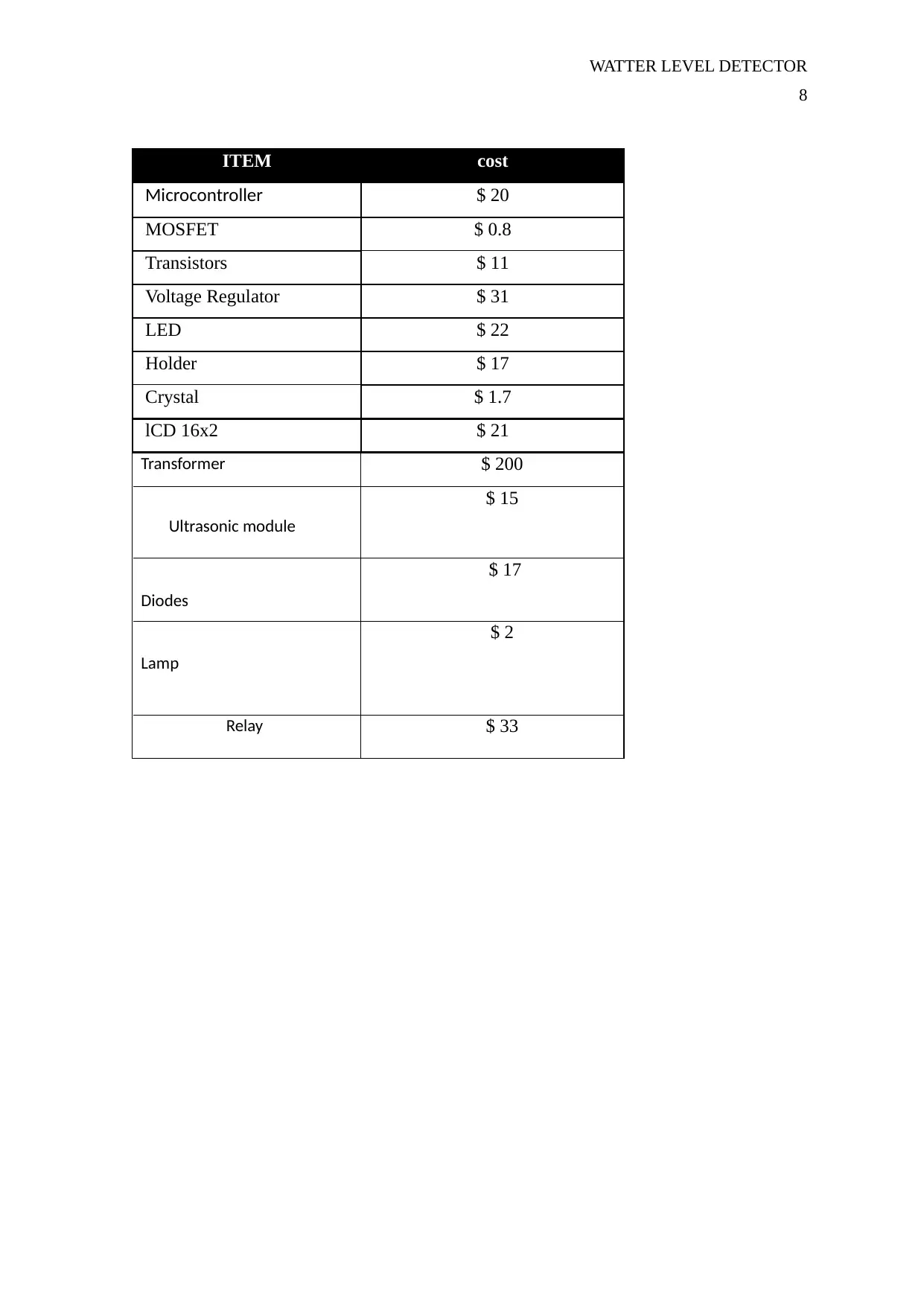
This project proposal outlines the design and implementation of a water level controller system using an ultrasonic module and a microcontroller. The system aims to automatically manage water levels in a tank by detecting the liquid level via ultrasonic signals, which are then processed by a microcontroller to control a pump. The project utilizes components such as an ultrasonic module, microcontroller, MOSFET, transistors, voltage regulator, and other electrical components. The system's operation is described in three conditions: tank empty, intermediate levels, and tank full, with corresponding outputs displayed on a seven-segment display and a lamp. The proposal includes hardware and software specifications, a block diagram, and a list of references. The primary outcome is to build an automated water level indicator system that efficiently manages water levels and potentially detects fuel levels in vehicles.
1 out of 9

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.