EN0300 Advanced Mechanics Assignment: Beam Deflection & Crane Analysis
VerifiedAdded on 2023/04/25
|7
|1246
|148
Homework Assignment
AI Summary
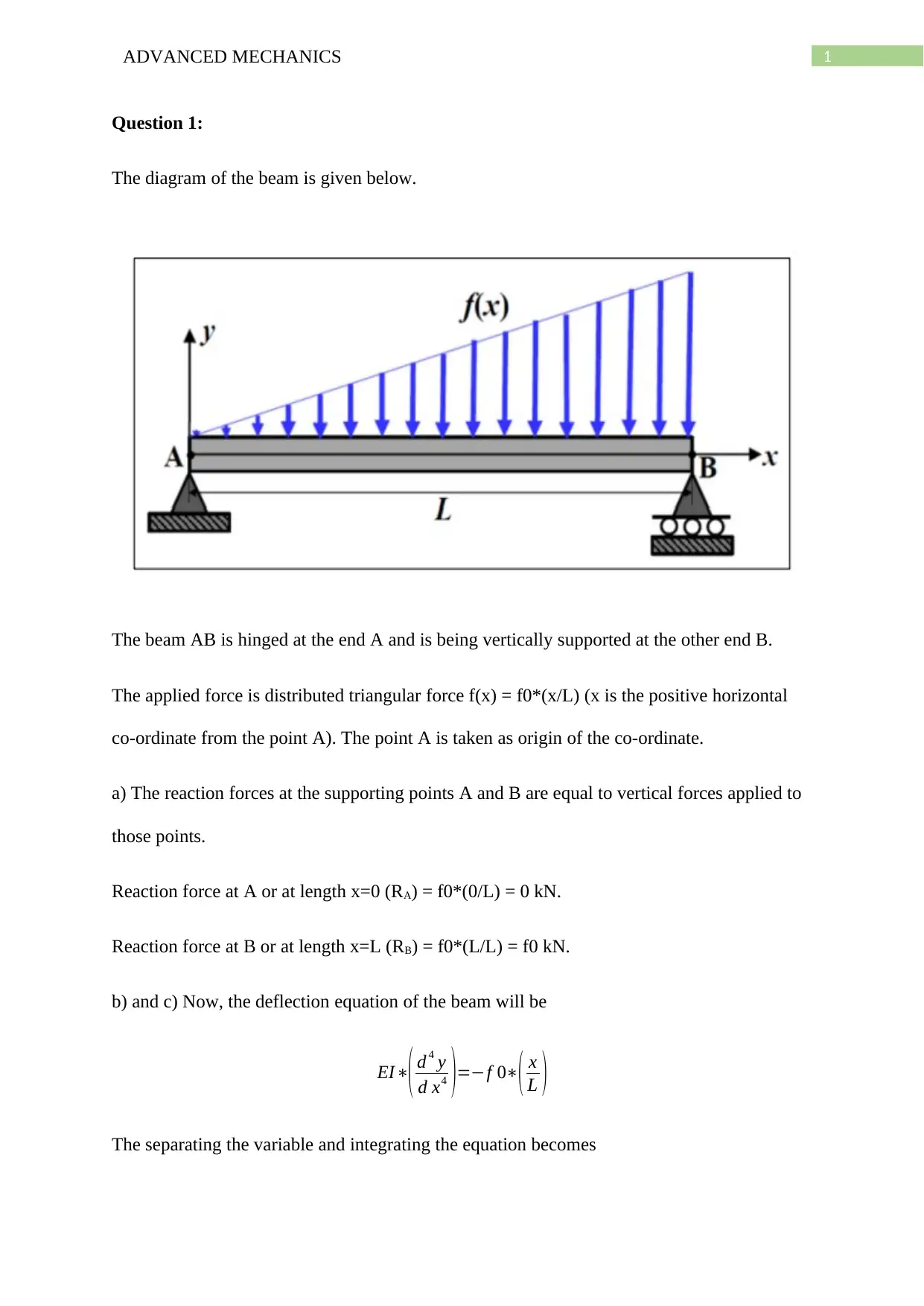
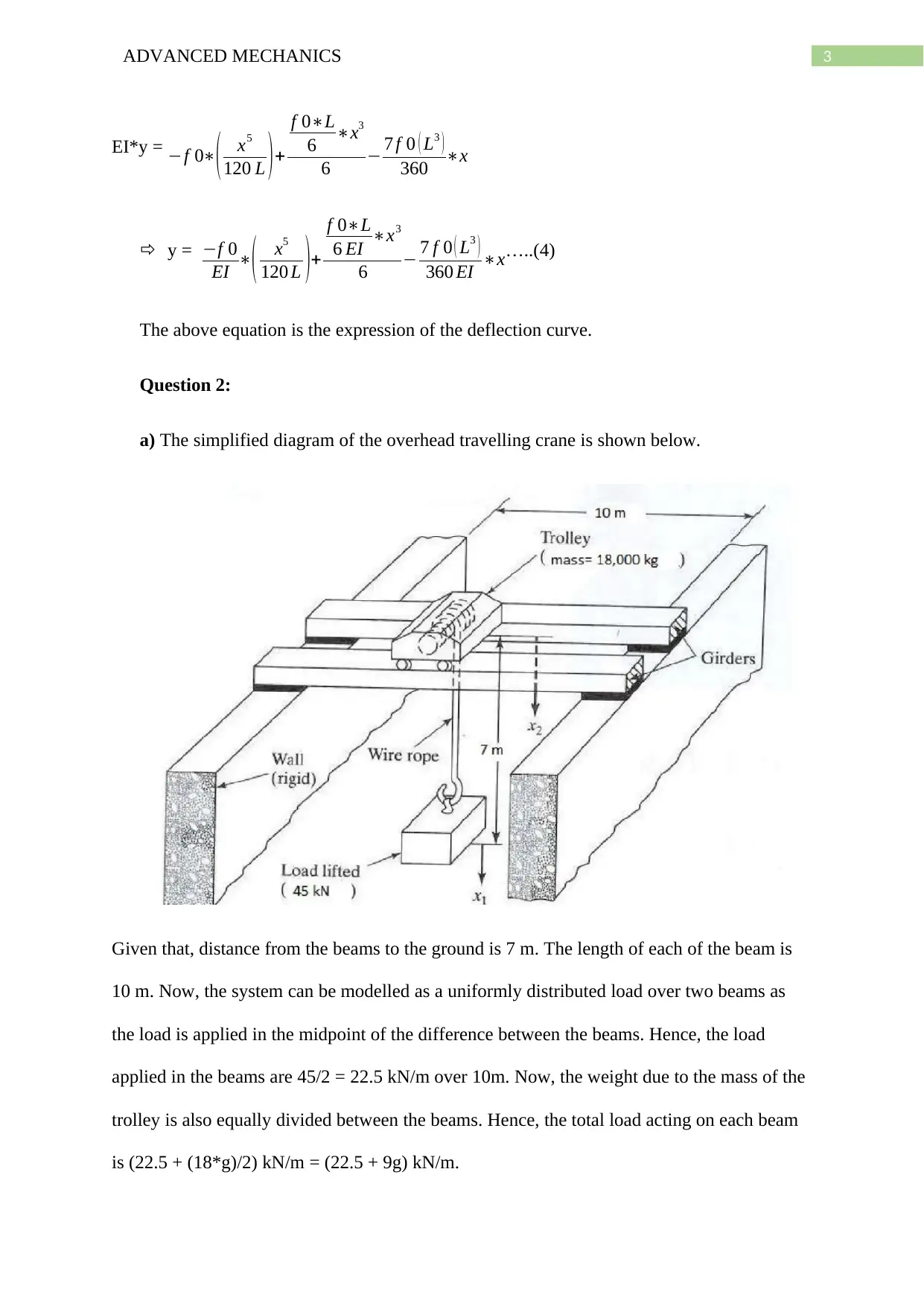
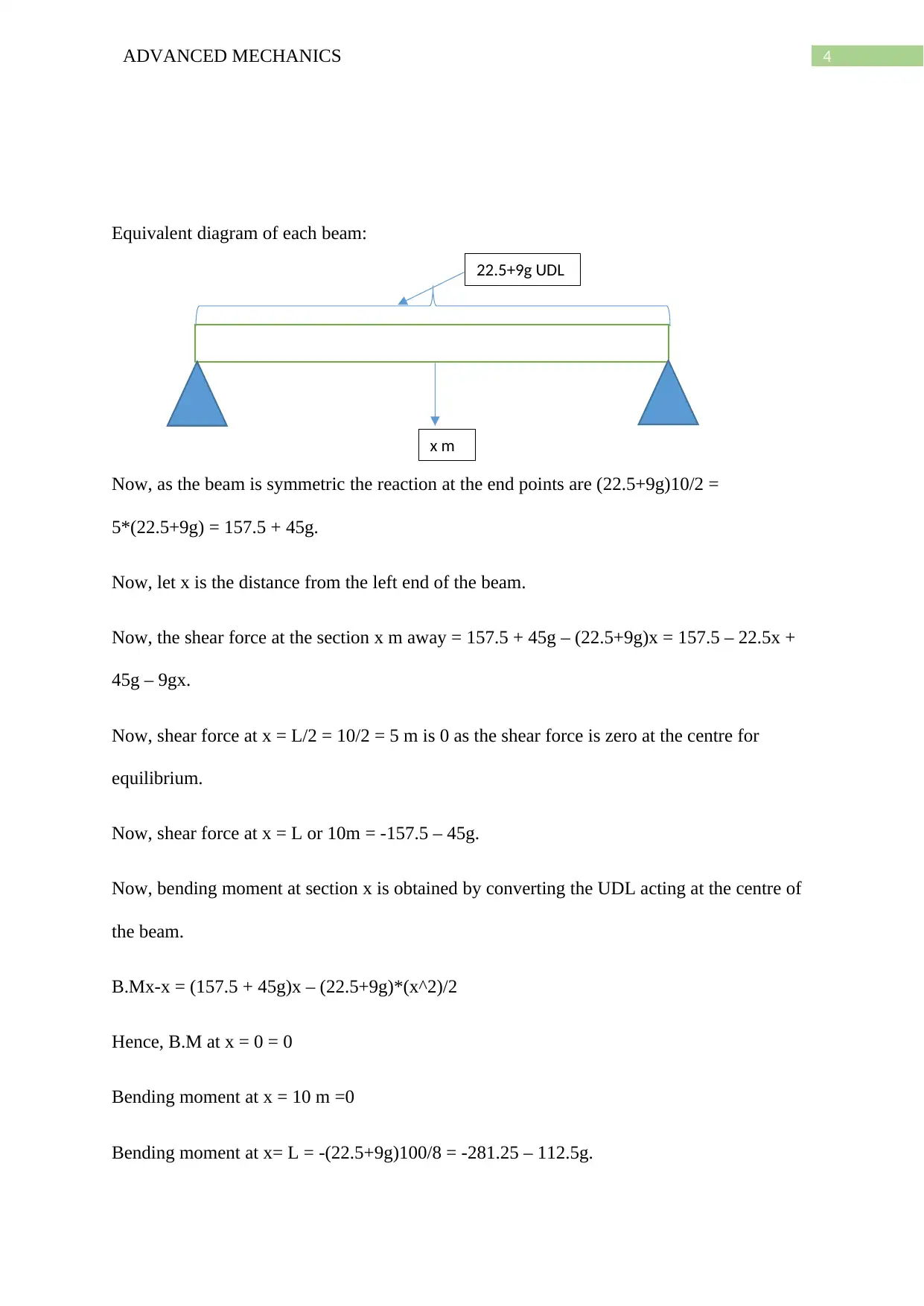
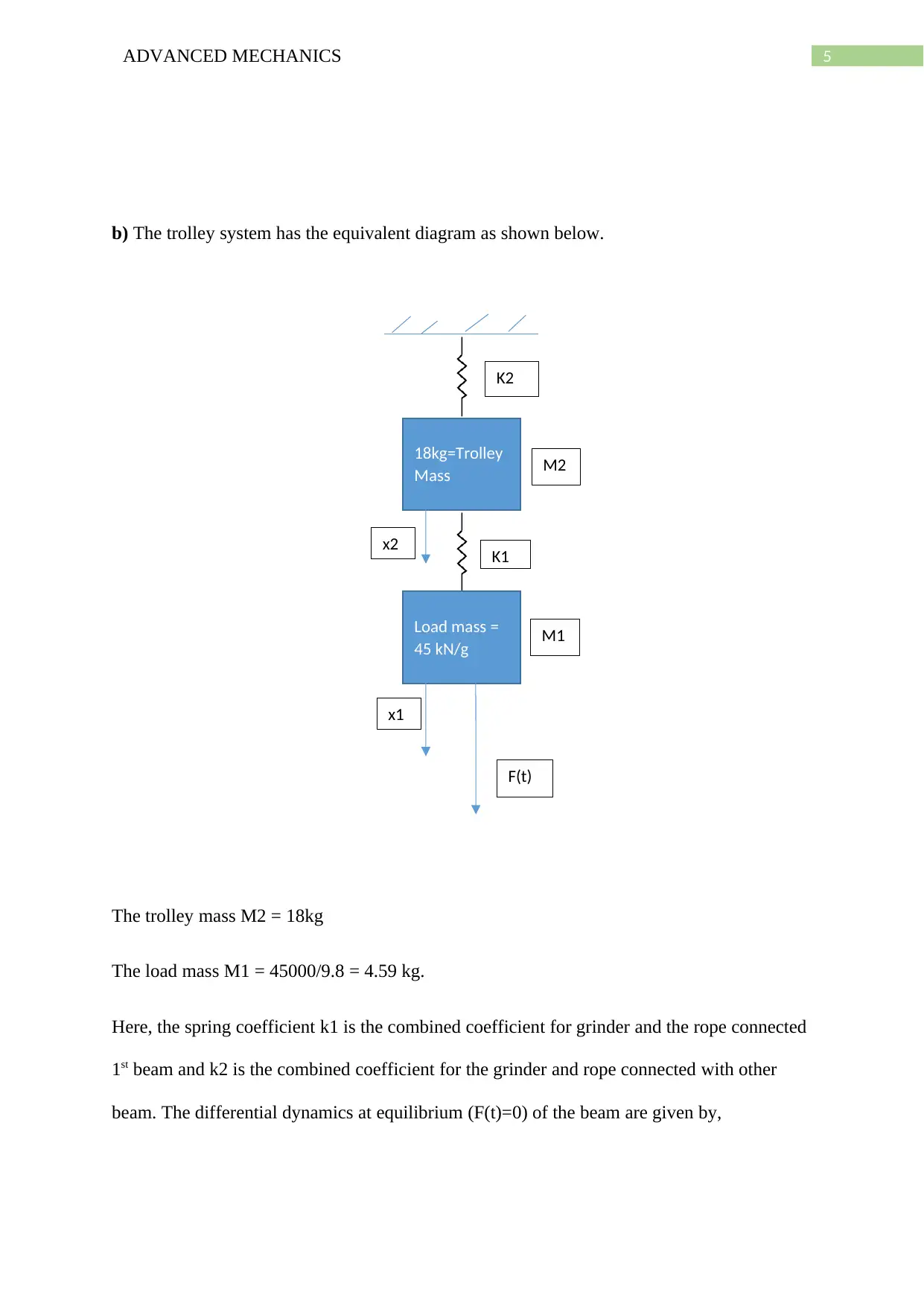
This assignment solution covers advanced mechanics concepts, specifically focusing on beam deflection analysis and crane system dynamics. The first question involves calculating reaction forces and deriving the deflection equation for a beam under triangularly distributed load. Boundary conditions are applied to determine constants and obtain the final deflection curve. The second question analyzes an overhead traveling crane, modeling it as a uniformly distributed load on two beams. Shear force and bending moment diagrams are calculated. Furthermore, the trolley system is modeled as a dynamic system, and its transfer matrix is derived to determine the natural frequency and damping factor. Desklib offers a platform to access similar solved assignments and past papers for students.


1 out of 7
Related Documents




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.