Engineering Mathematics MATLAB Assignment Solution, 2018-19
VerifiedAdded on 2023/05/30
|11
|2073
|157
Homework Assignment
AI Summary
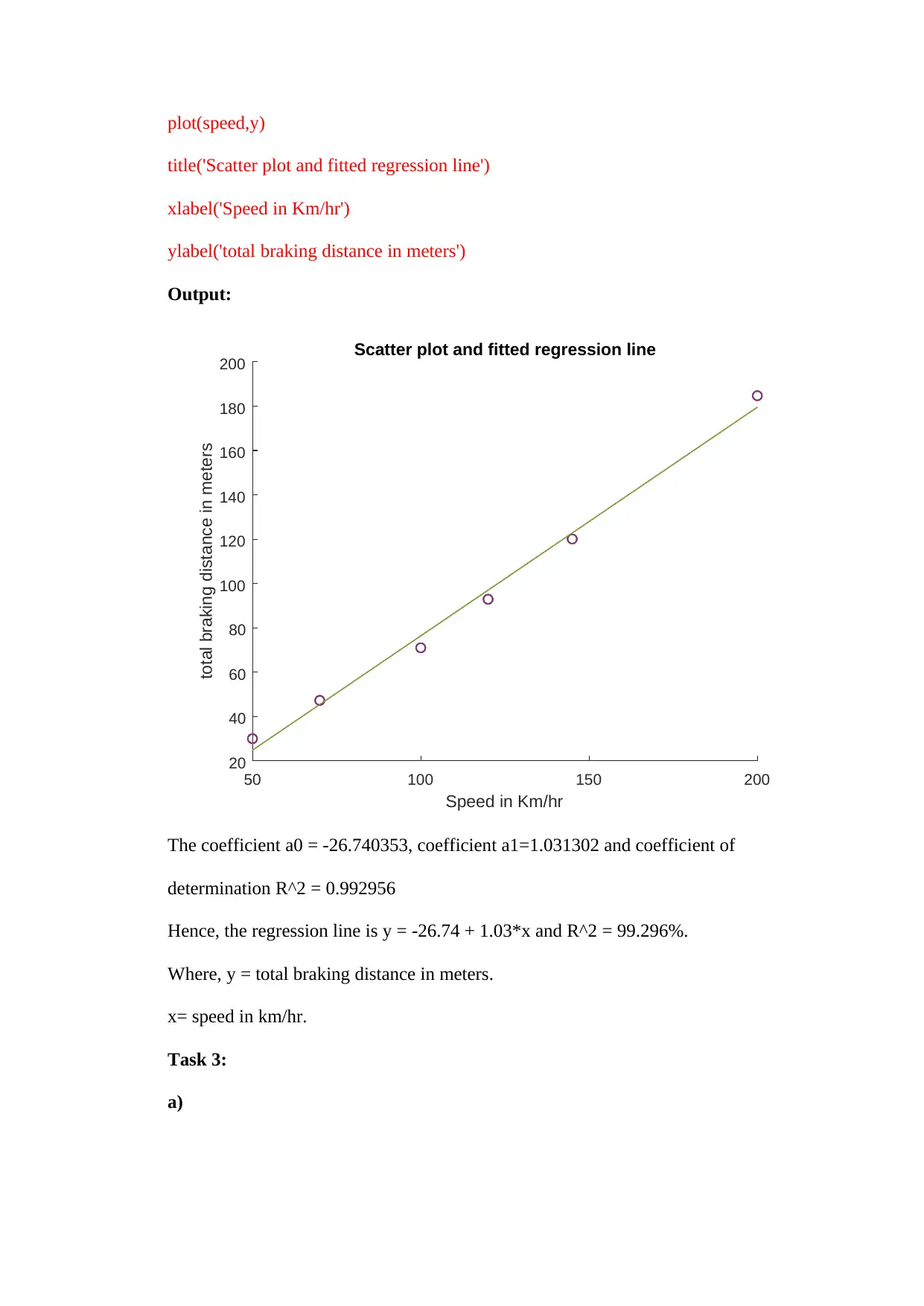
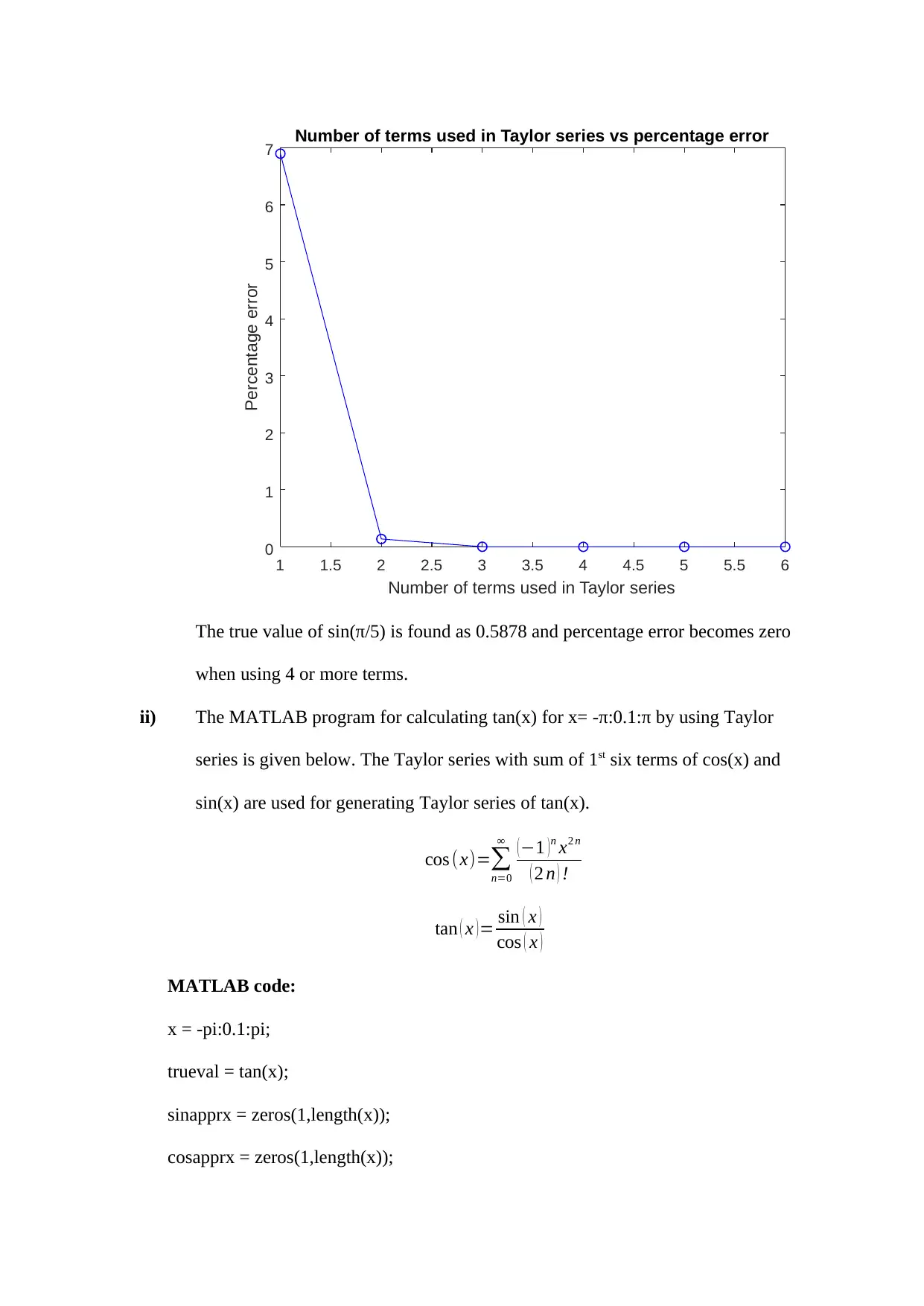
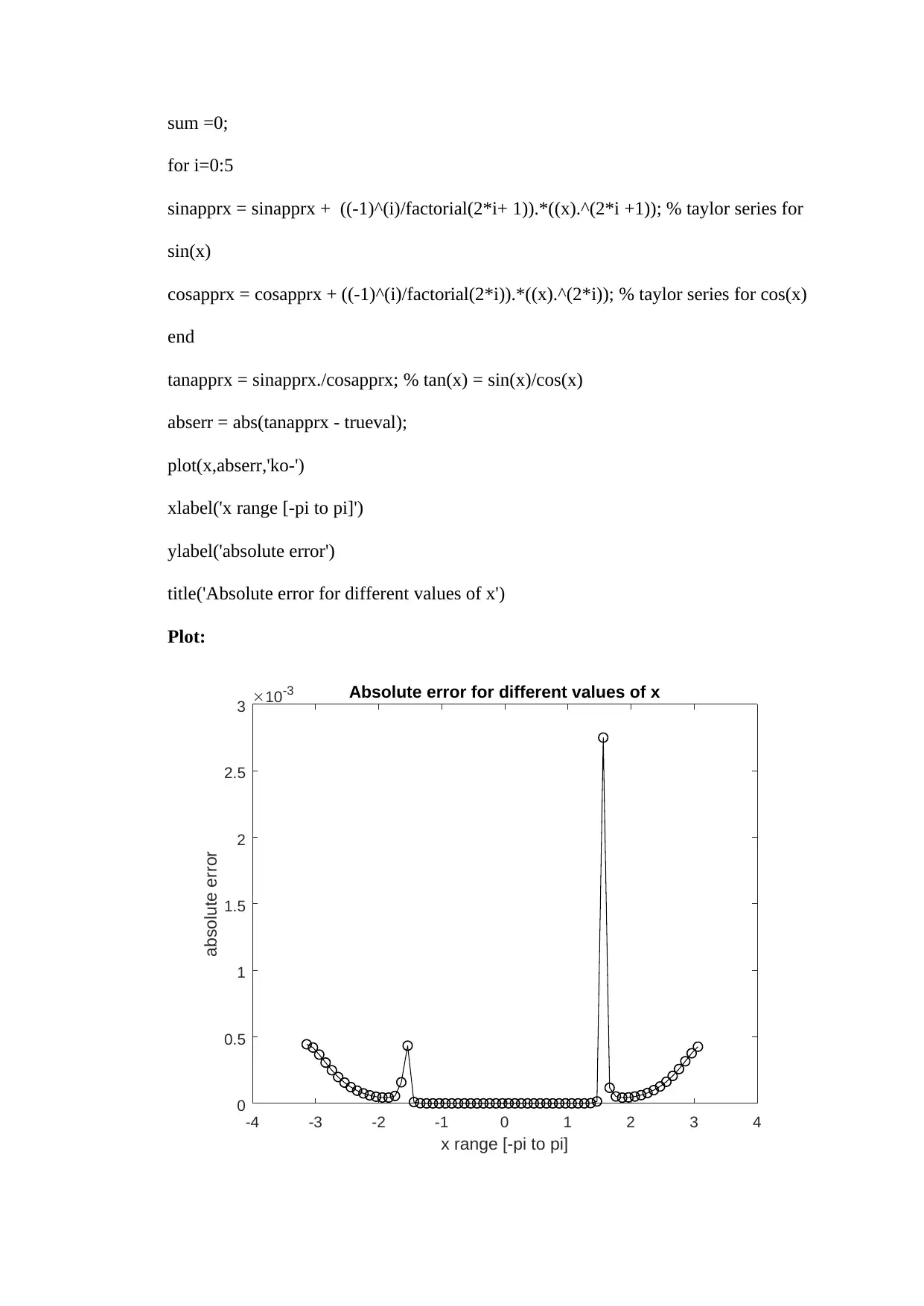
This document presents a comprehensive MATLAB assignment solution for an Engineering Mathematics course. The assignment is divided into three tasks. Task 1 focuses on creating MATLAB functions to convert miles and yards to kilometers, convert minutes to hours and minutes, and solve quadratic equations, classifying the roots. Task 2 involves analyzing braking distances at different speeds, calculating correlation coefficients, and generating a regression line with a scatter plot. Task 3 explores Taylor series applications, including calculating sin(π/5) using a Taylor series with varying terms and plotting the percentage error. The assignment also includes a program to determine the number of terms needed for a Taylor series of sin(x) to achieve a specified truncation error threshold, displaying the minimum number of terms, average, and maximum truncation errors.

1 out of 11
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.