Mechanical Engineering: Vector Calculus, ODEs, and Fourier Series
VerifiedAdded on 2022/09/08
|12
|940
|27
Homework Assignment
AI Summary
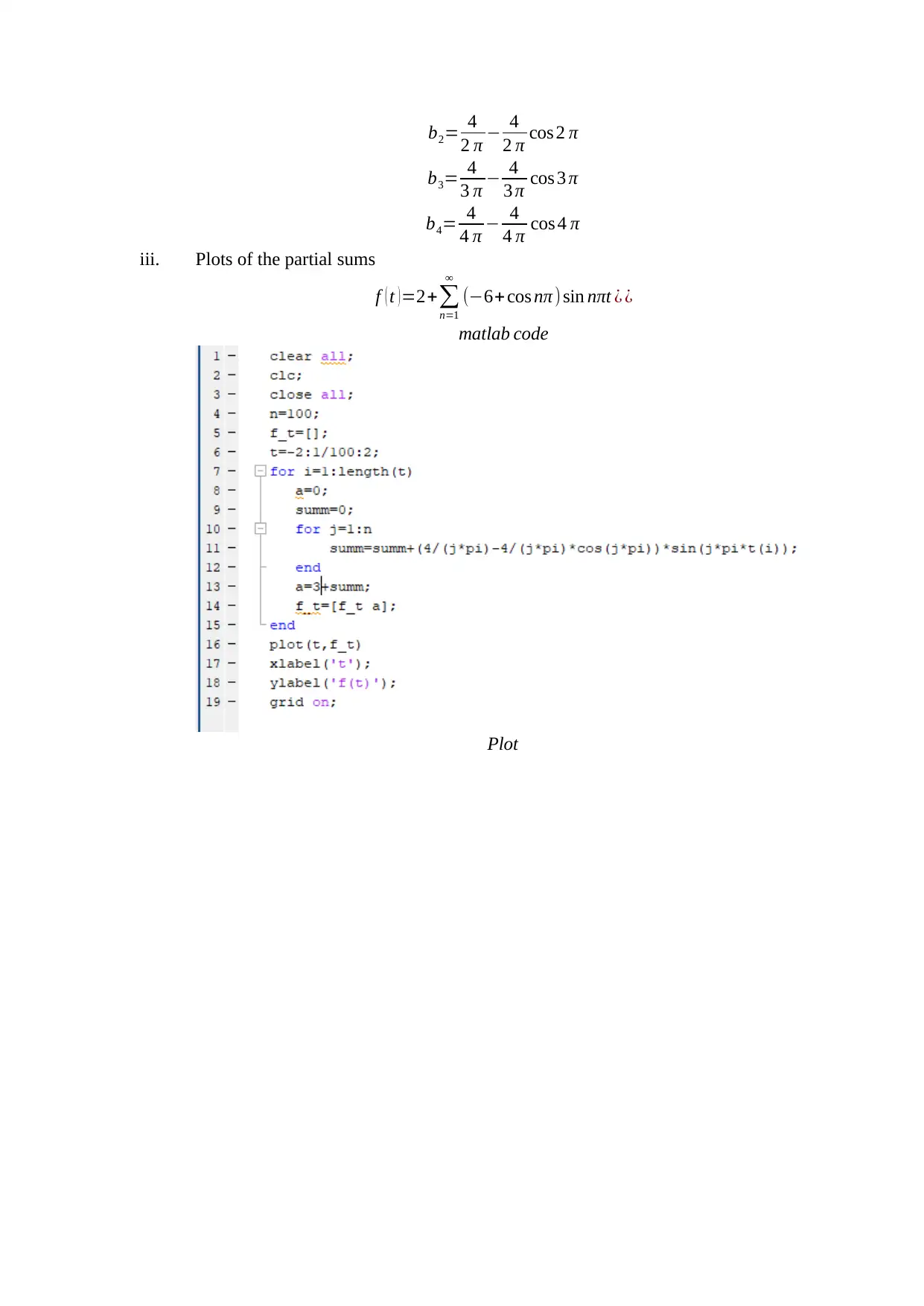
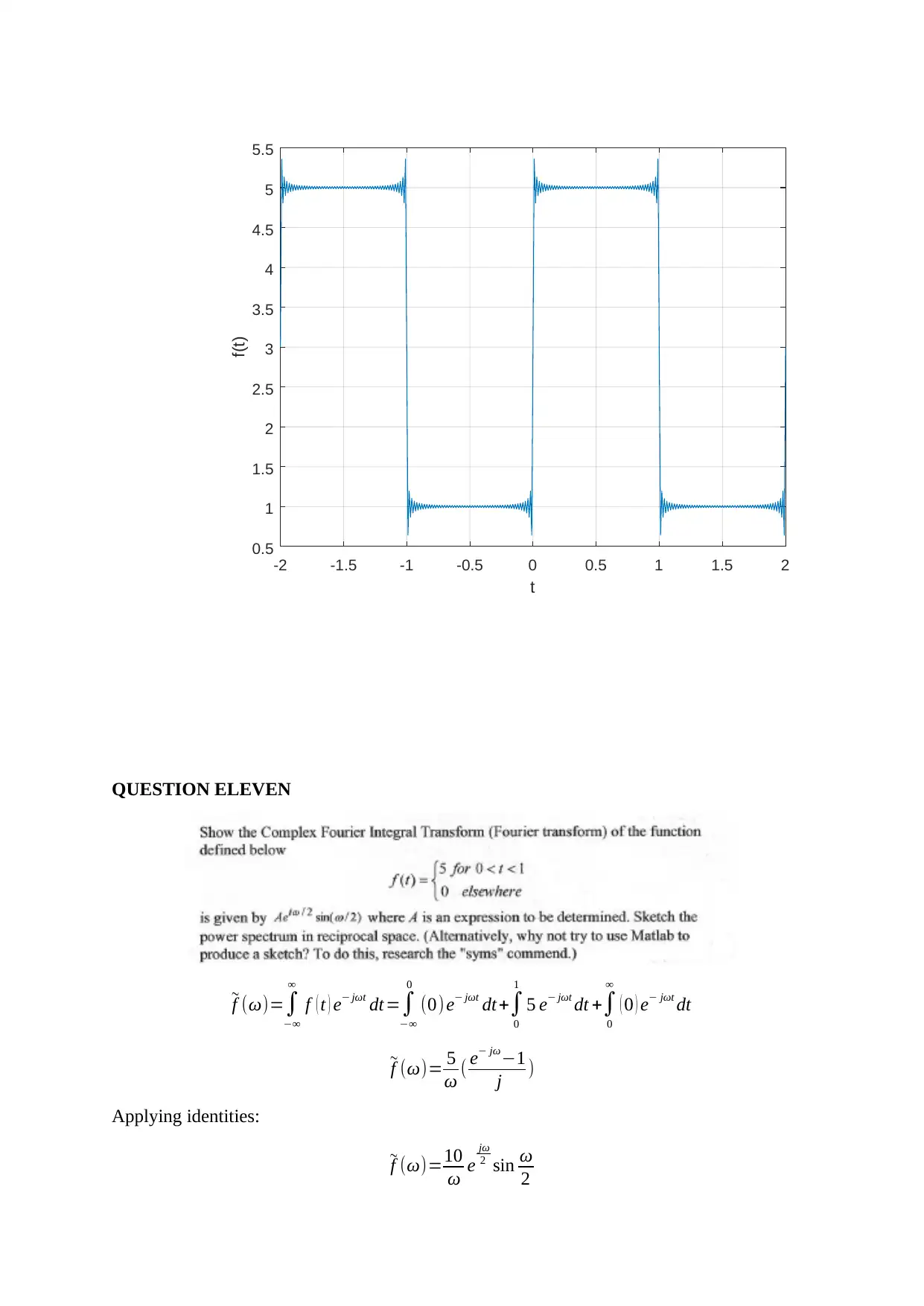
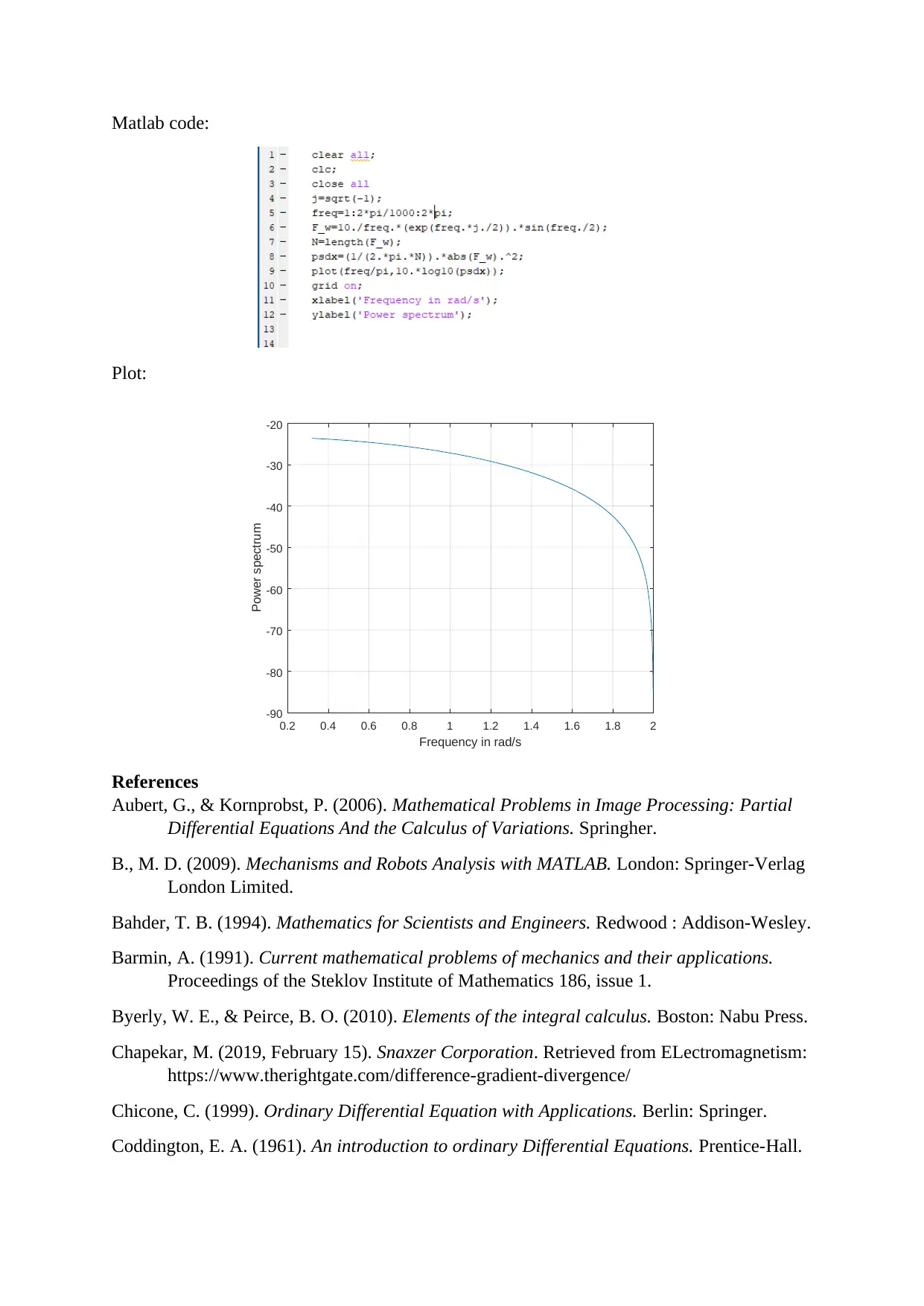
This document presents solutions to an engineering mathematics homework assignment, addressing a range of topics including vector calculus, ordinary differential equations (ODEs), and Fourier series. The solutions cover finding the nominal of a function, evaluating directional derivatives, calculating divergence and curl of vector fields, analyzing incompressible fluid velocity, determining conditions for divergence and curl to be zero, deriving Bernoulli's equation, solving coupled differential equations, and analyzing a periodic function using Fourier series. The solutions incorporate Matlab code for plotting and visualization, along with a comprehensive list of references. The assignment demonstrates a strong understanding of mathematical concepts and their application in engineering contexts.




1 out of 12
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.