Horizon Labs Internship: Engineering Mathematics Wave Equation Report
VerifiedAdded on 2023/01/20
|20
|2432
|67
Report
AI Summary
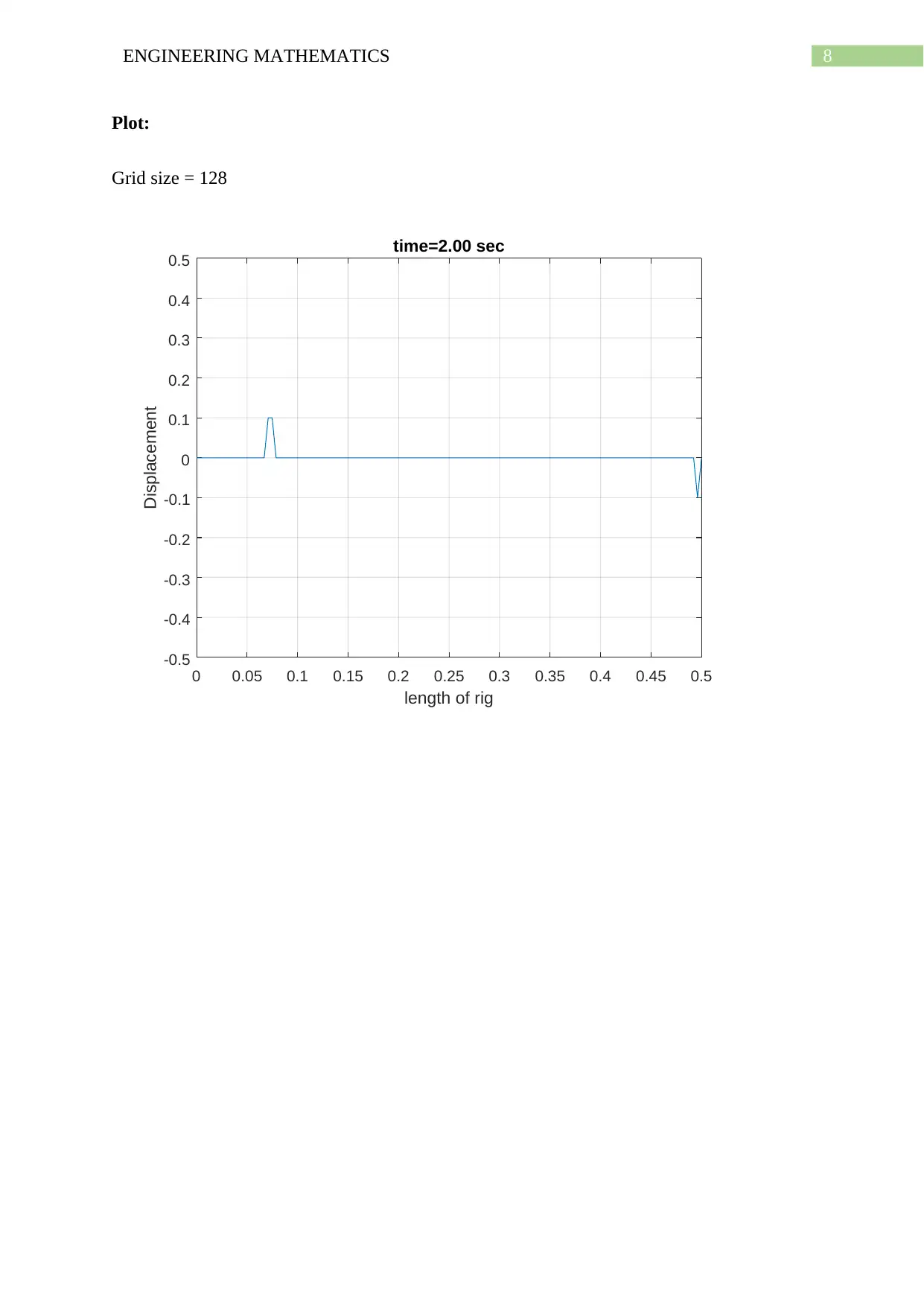
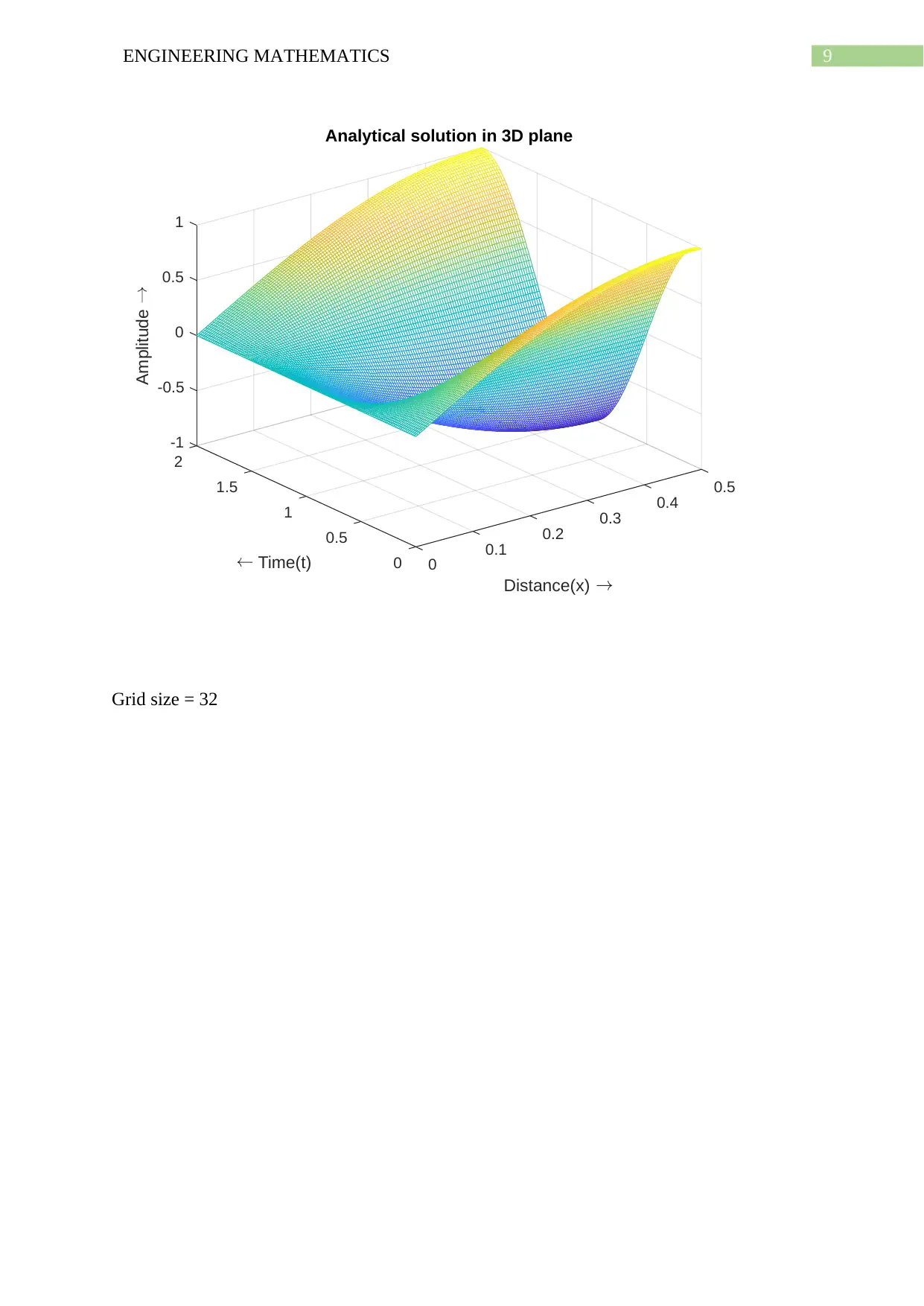
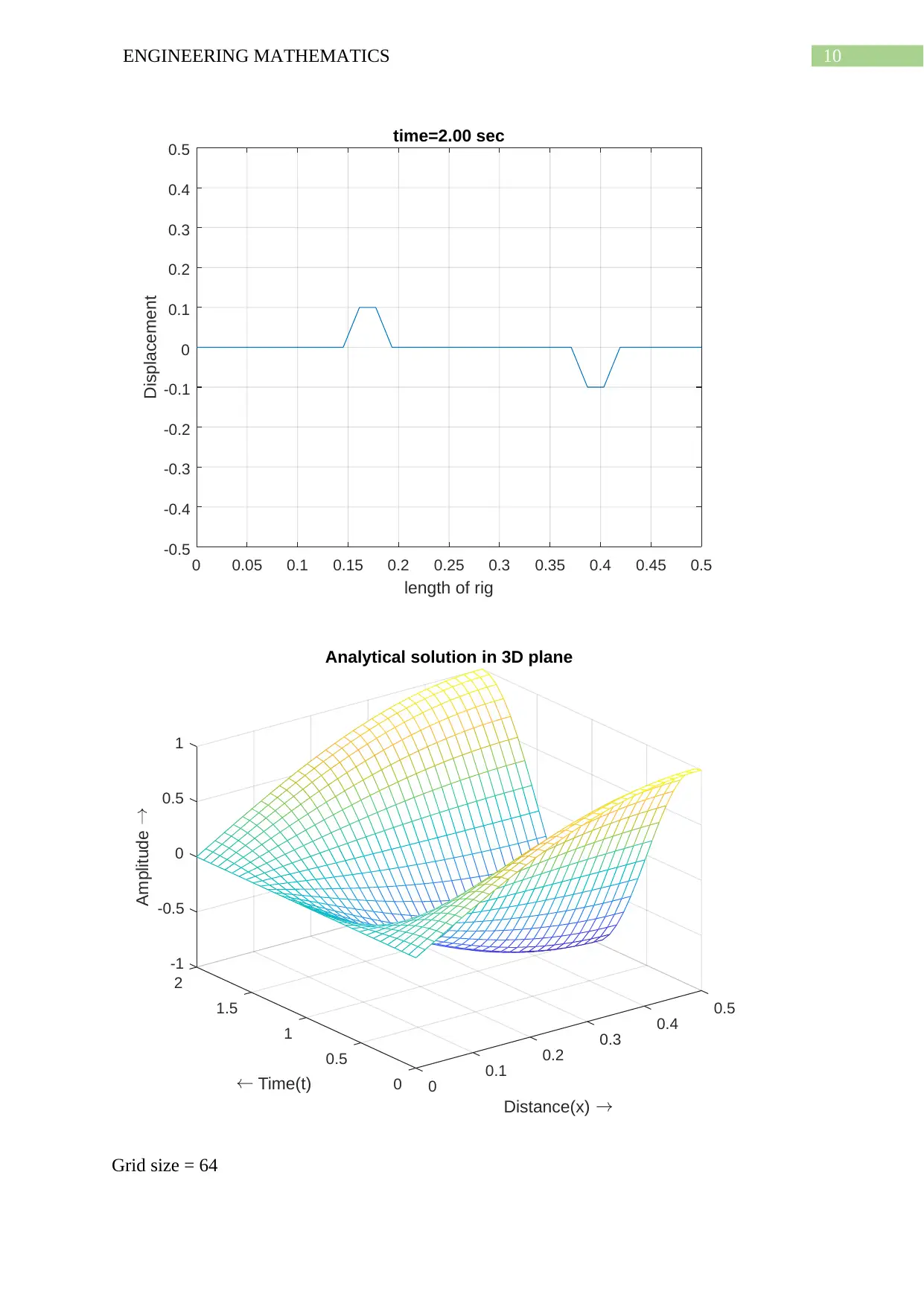
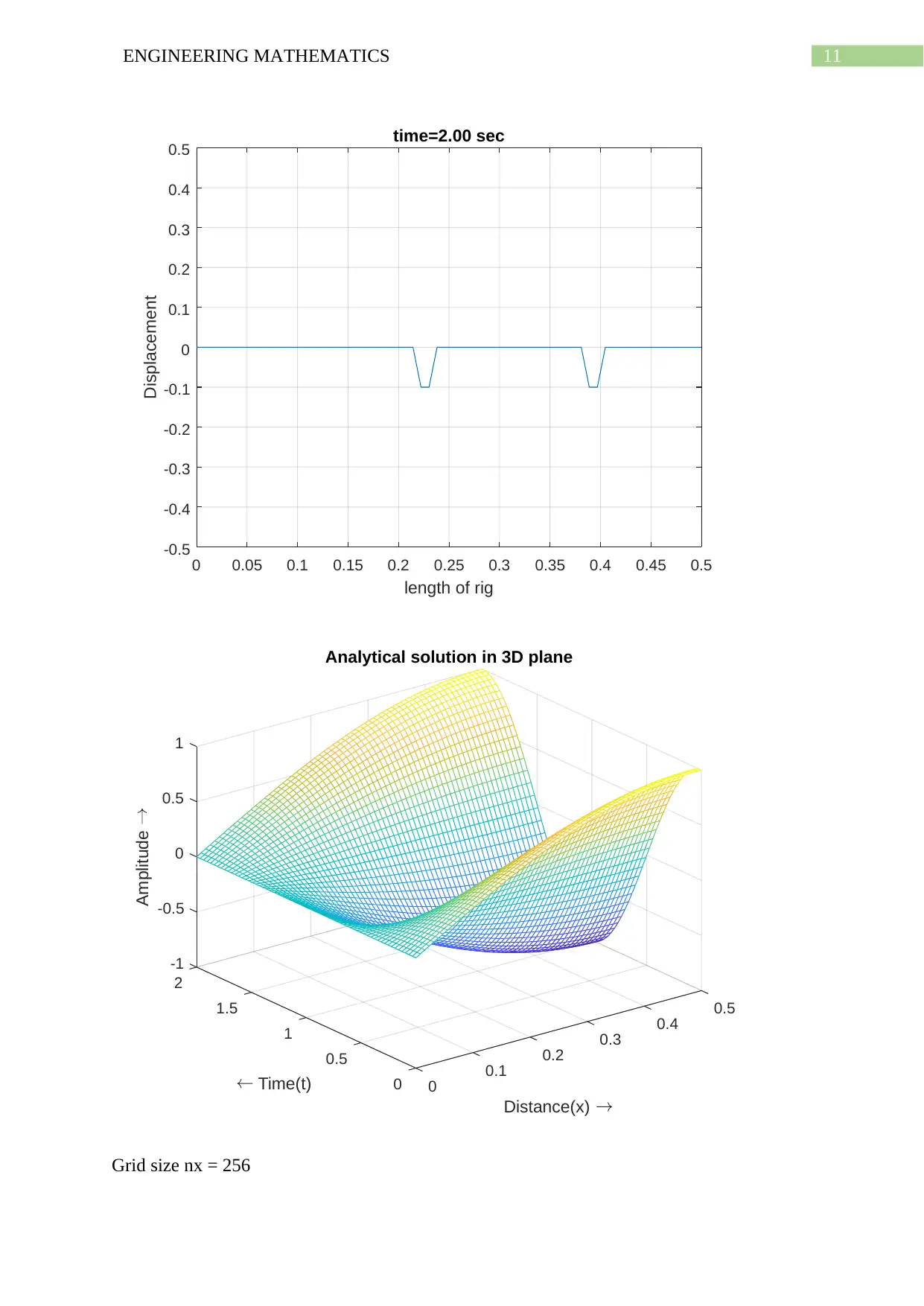
This report presents an analysis of the 1D wave equation, focusing on numerical solutions obtained through the finite difference method and MATLAB simulations. Section 1 formulates the wave equation, derives boundary conditions, and explores analytical solutions using separation of variables. Section 2 delves into numerical solutions, utilizing MATLAB code to simulate wave propagation and visualize results with varying grid sizes, comparing the numerical solution to an analytical solution. The report also investigates the effects of changing the grid size. Section 3 extends the analysis to include a forcing function, simulating the impact of a sonic wave inducer on the web. The report discusses the influence of the force amplitude and frequency on the wave behavior, providing graphical outputs for different parameter values.





1 out of 20
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.