ENG3104: Engineering Simulations and Computations Assignment 2
VerifiedAdded on 2022/11/09
|28
|5030
|219
Homework Assignment
AI Summary
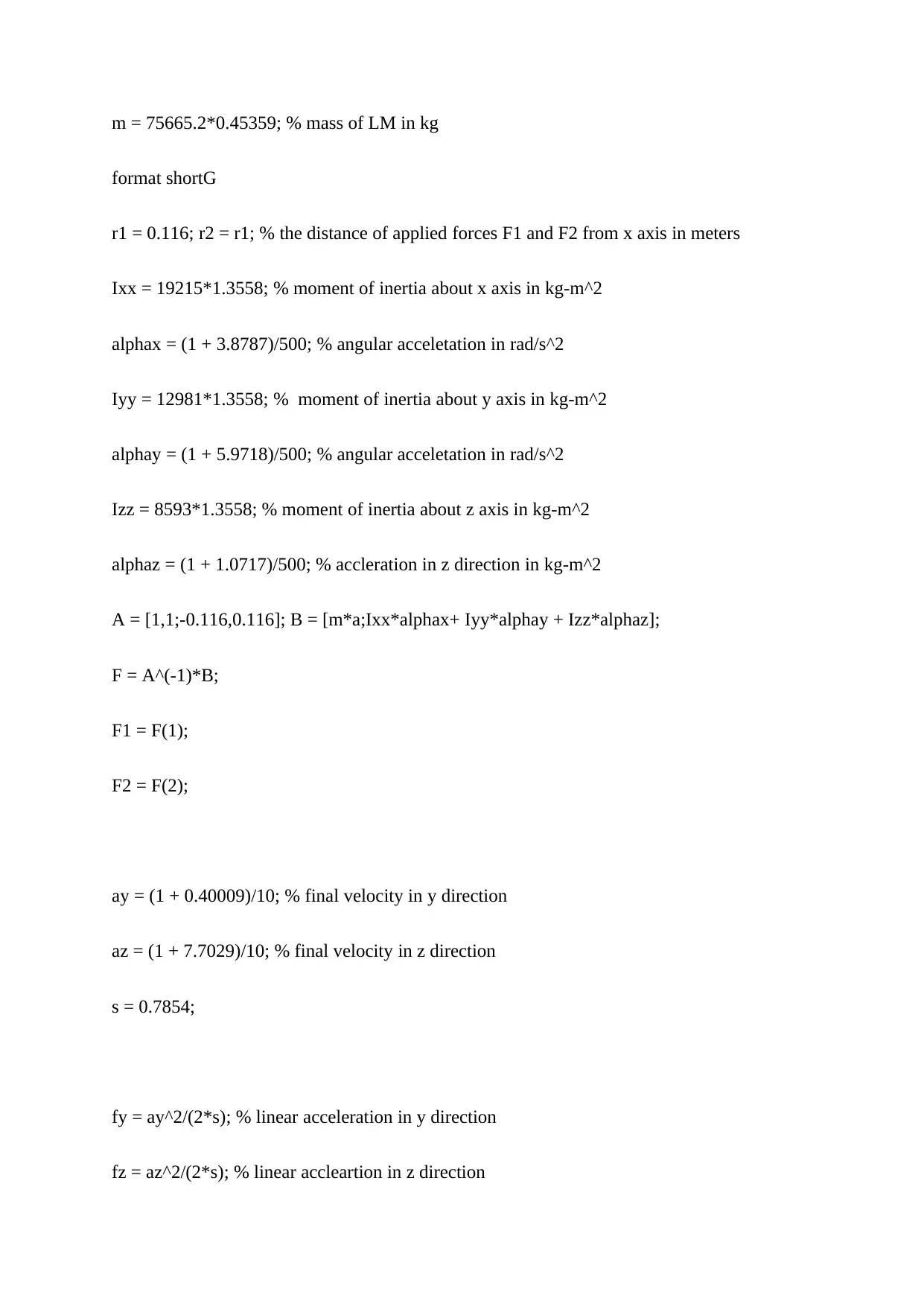
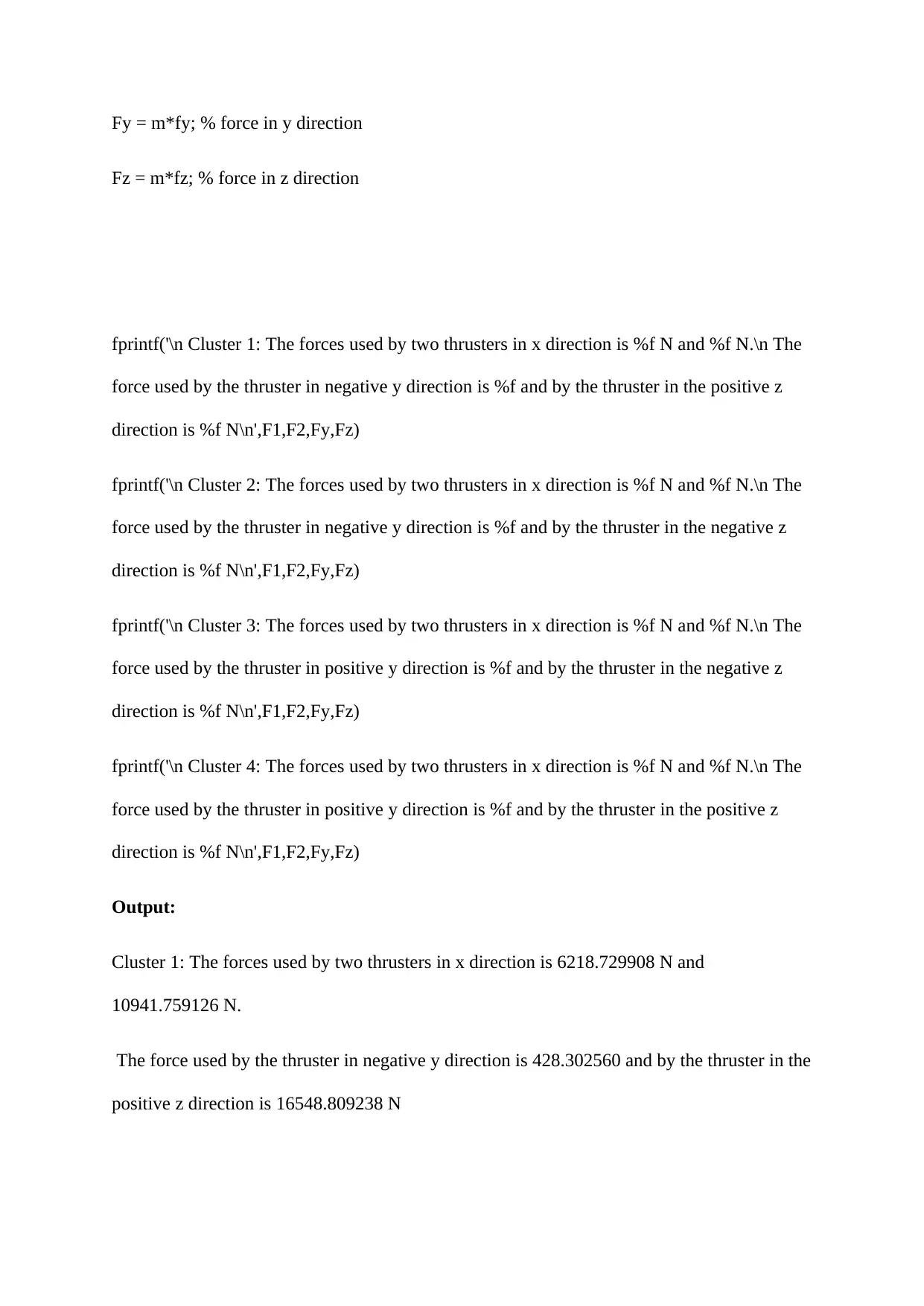
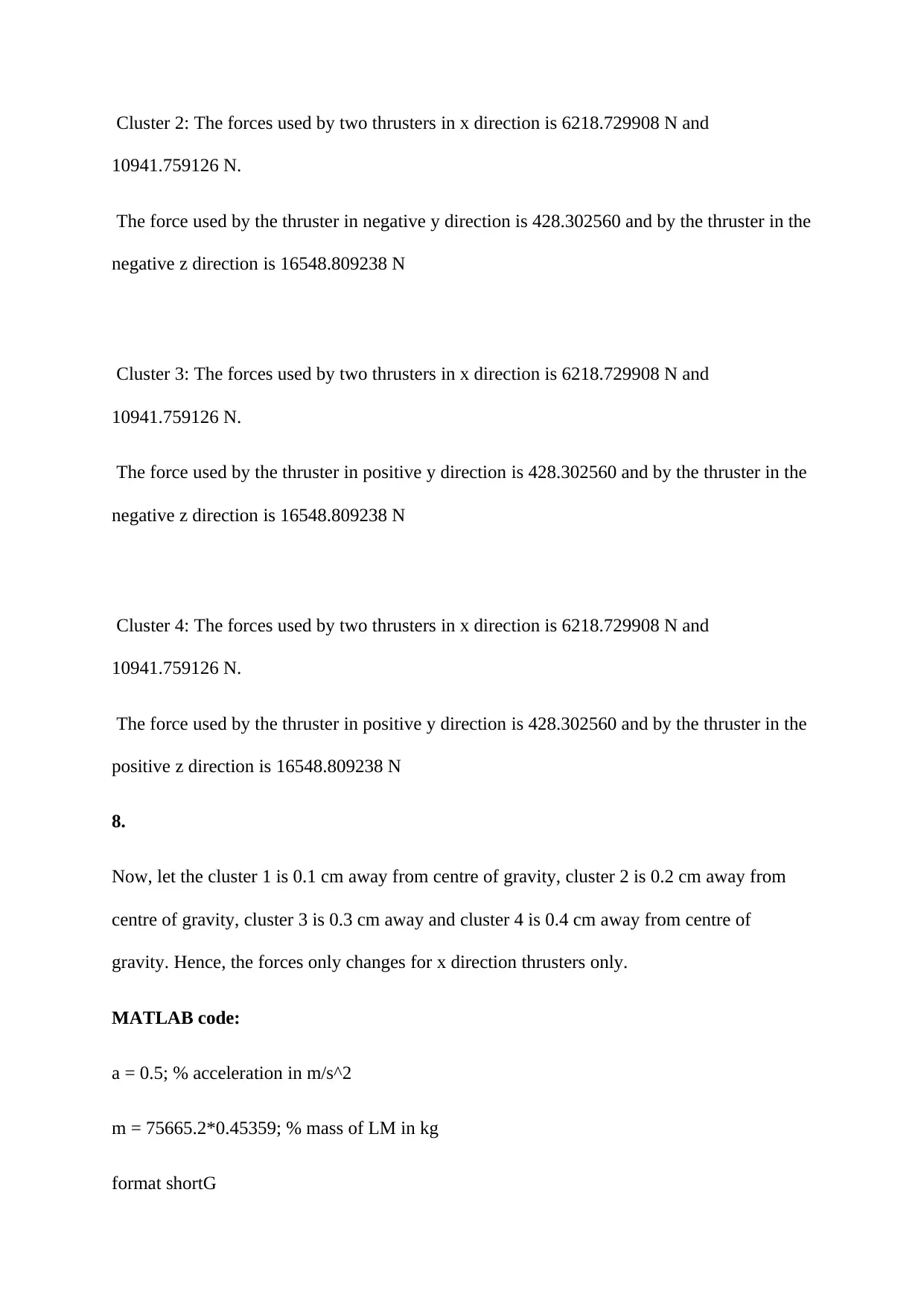
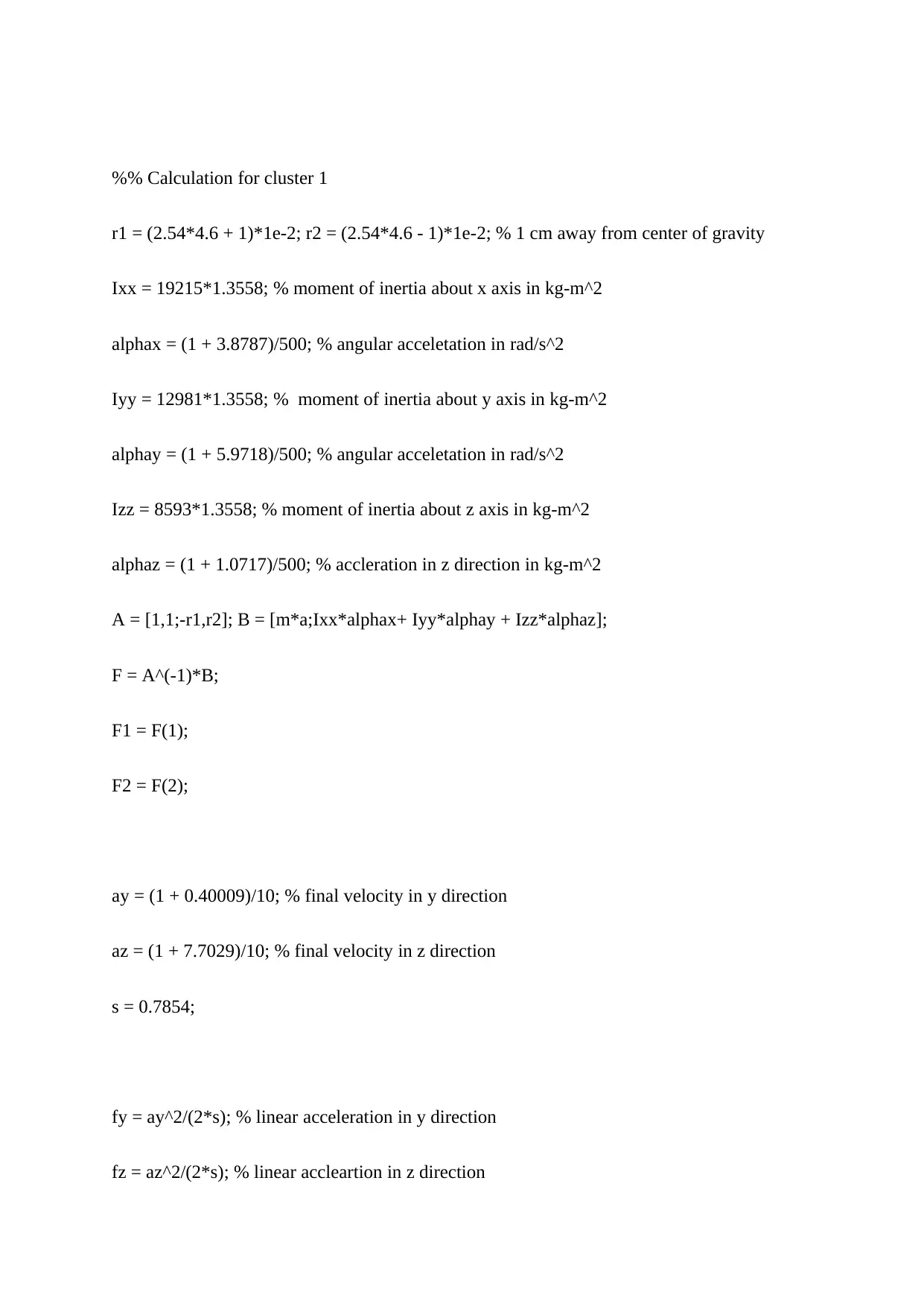
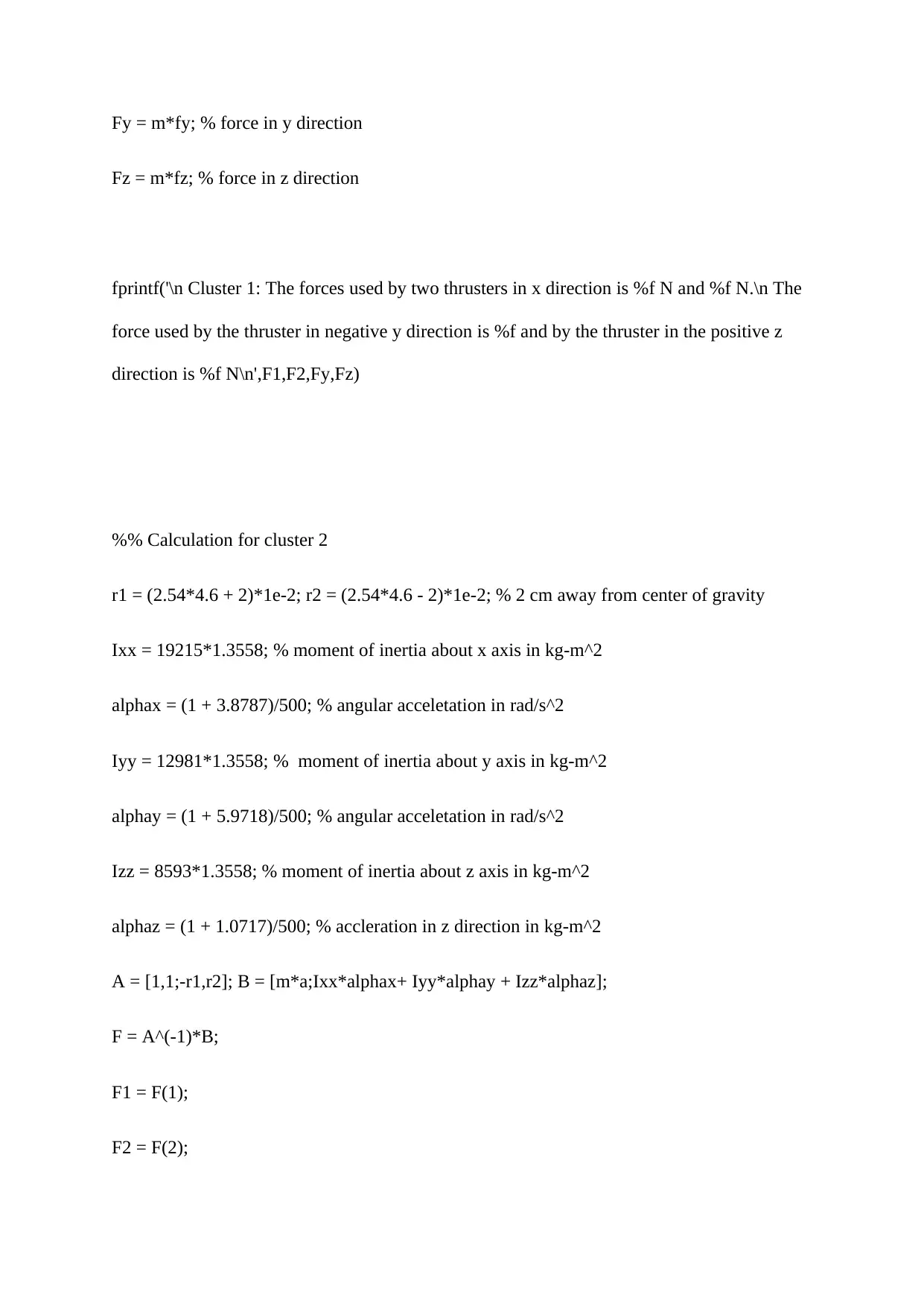
This assignment solution for ENG3104 focuses on simulating the landing of the Apollo 11 Lunar Module (LM). The solution begins by calculating the force required for a given linear acceleration using Newton's second law, considering the mass of the LM. It then analyzes the forces and moments involved when thrusters are not aligned with the center of gravity, using simultaneous equations and matrix methods to determine individual thruster forces. The solution incorporates MATLAB code to verify the calculations, including scenarios with angular acceleration and forces in multiple directions. The document then explores the impact of thrusters in the y and z directions, and how the location of thrusters affects the force distribution. The document presents the calculations for different cluster configurations, and how the forces change based on the distance from the center of gravity. The solution includes detailed MATLAB code and output for each scenario, providing a comprehensive understanding of the LM's control system during descent.



1 out of 28
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.