Event-Based Imaging for Space Situational Awareness: PhD Research
VerifiedAdded on 2022/09/09
|7
|1395
|28
Project
AI Summary
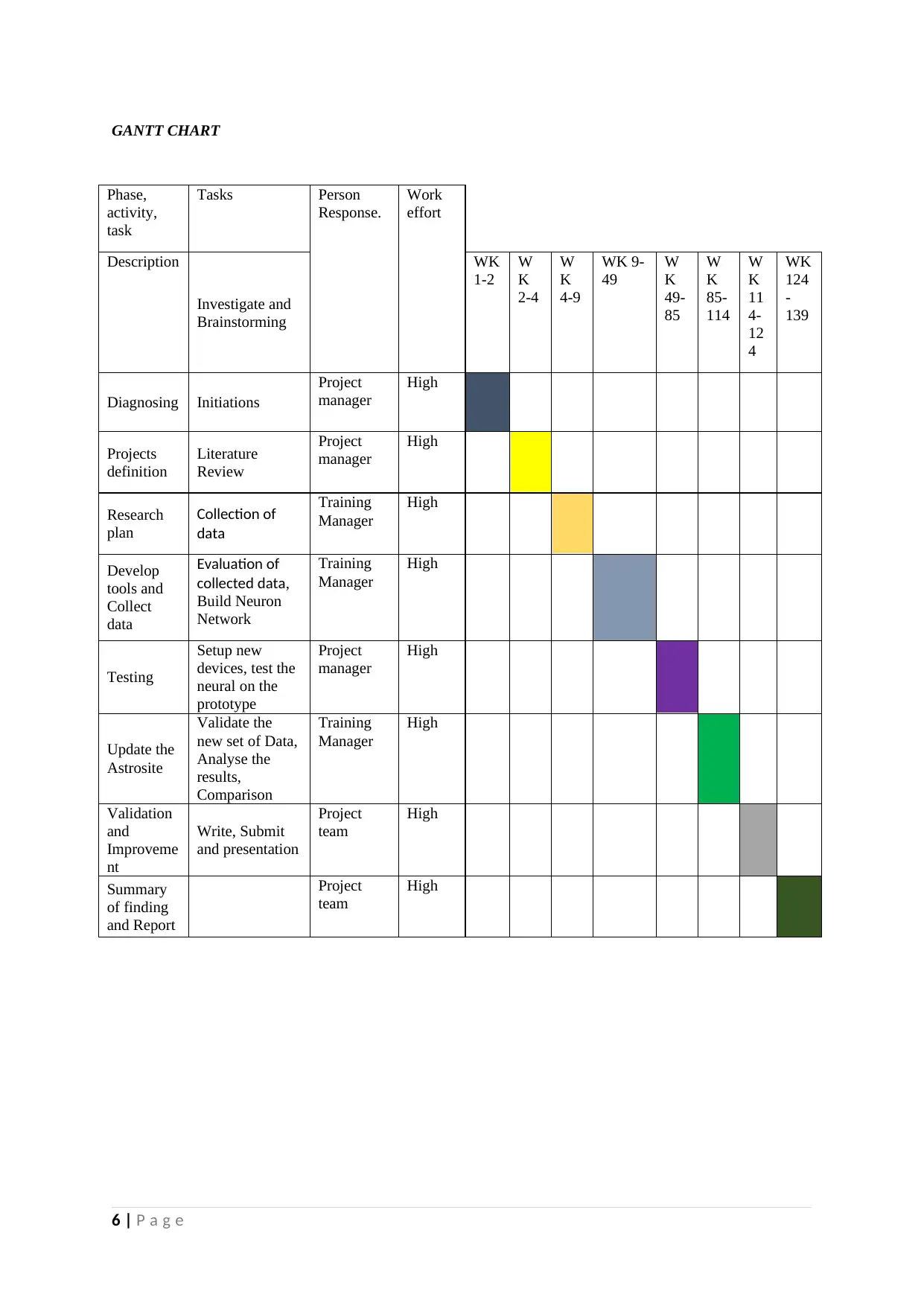
This PhD proposal outlines a research project focused on Event-Based Imaging for Space Situational Awareness (SSA). The research addresses the increasing challenges posed by satellite collisions and space debris through the use of neuromorphic cameras, specifically event-based cameras, which offer advantages like low latency and high dynamic range. The proposal investigates the potential of these cameras, along with Adaptive Optics (AO) systems and Deep Learning techniques, for satellite and space junk detection and tracking. The methodology includes collecting datasets with event-based and CCD cameras, feature extraction using FEAST and HOTS techniques, and FPGA implementation. The project aims to develop an algorithm that can be implemented to find time differences using Global Positional System (GPS) receiver signals with multiple telescopes and event-based cameras. The research will utilize the Astrosite observatory for data collection and validation. The expected outcome is an enhanced solution for space management and SSA, providing improved information about satellites and space junk, ultimately contributing to space traffic management. The project includes a Gantt chart outlining the phases, activities, and resource requirements for the research.

1 out of 7
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.