ME5013: Comprehensive Analysis of a Simply Supported Beam (FEA Report)
VerifiedAdded on 2023/01/06
|17
|2029
|41
Report
AI Summary
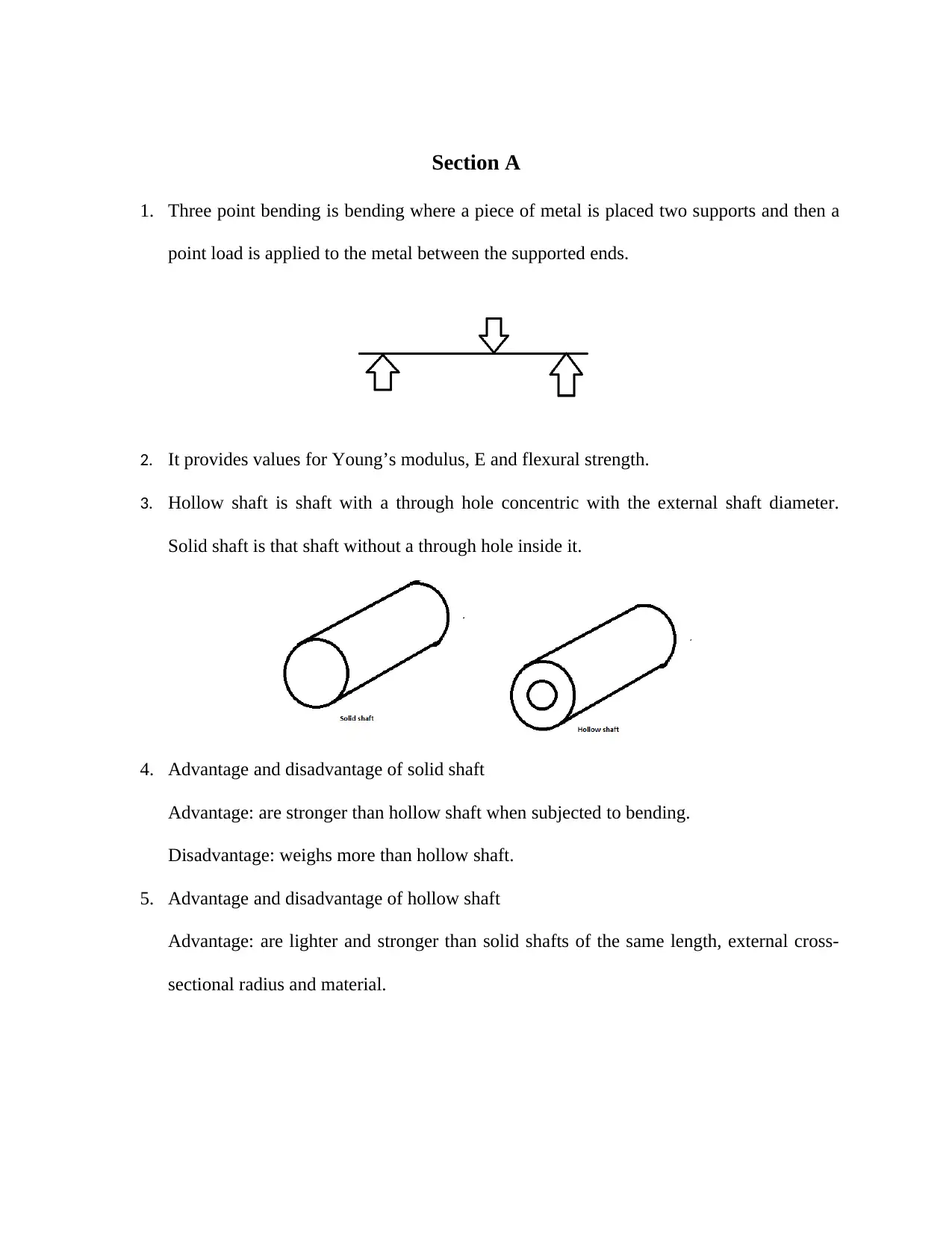
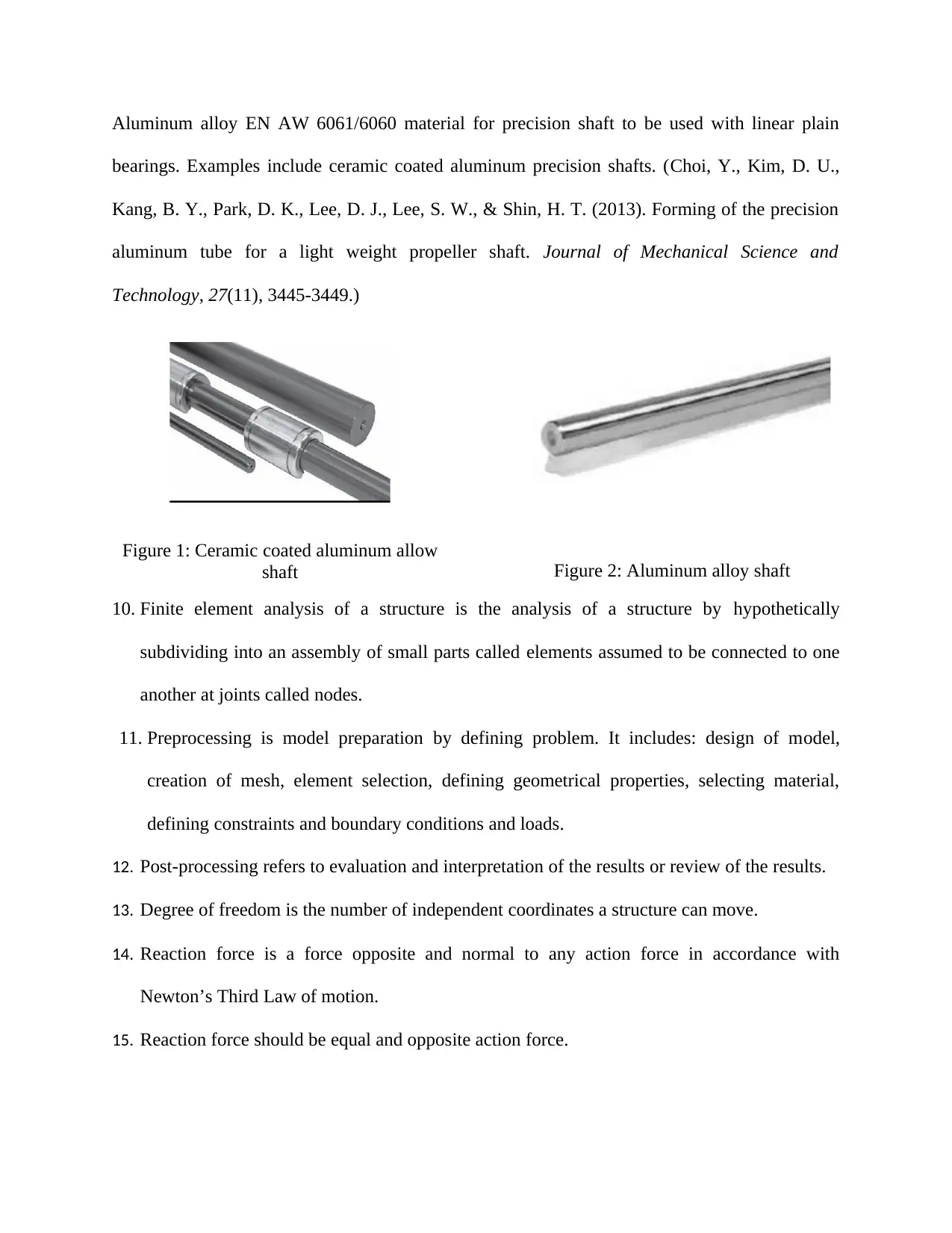
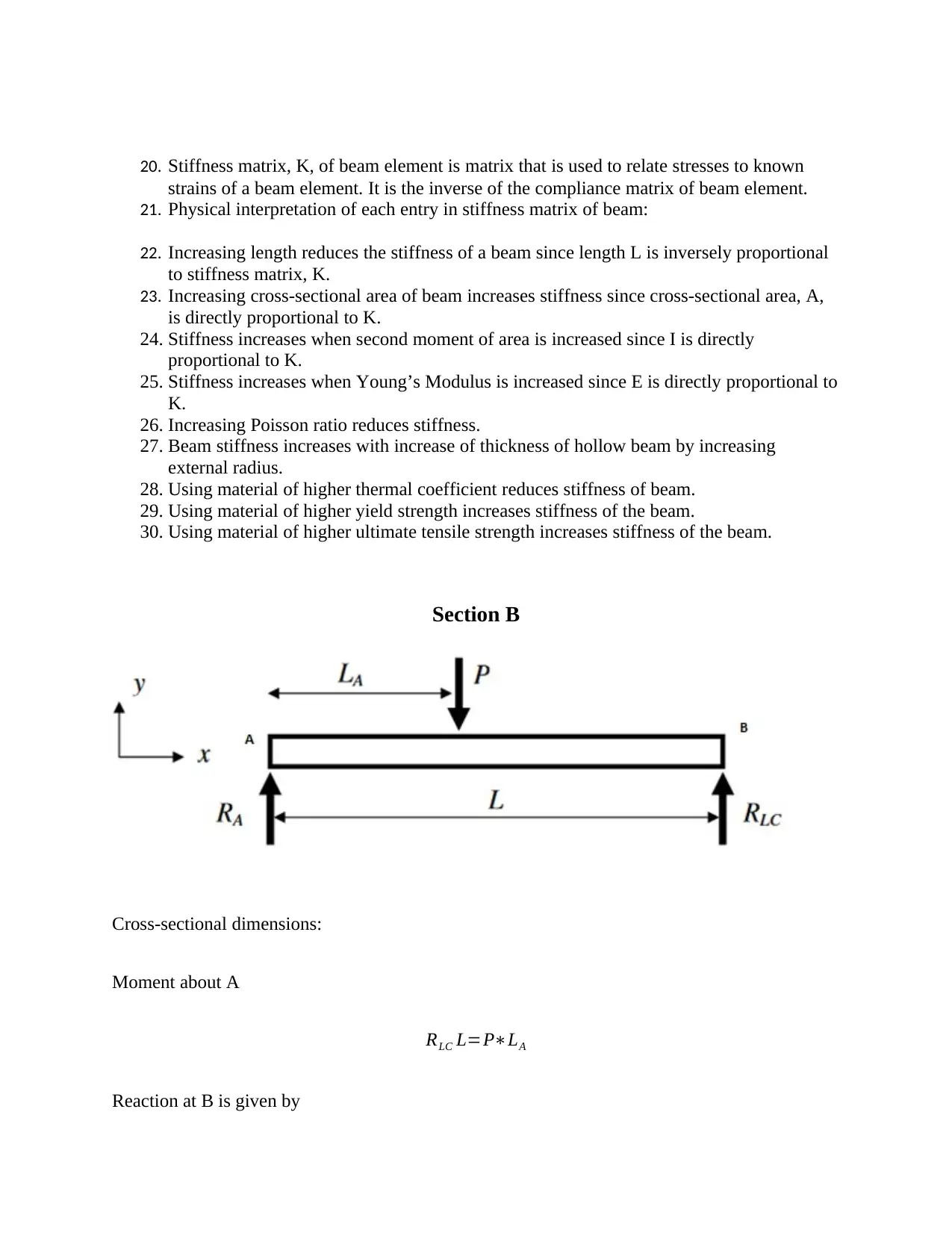
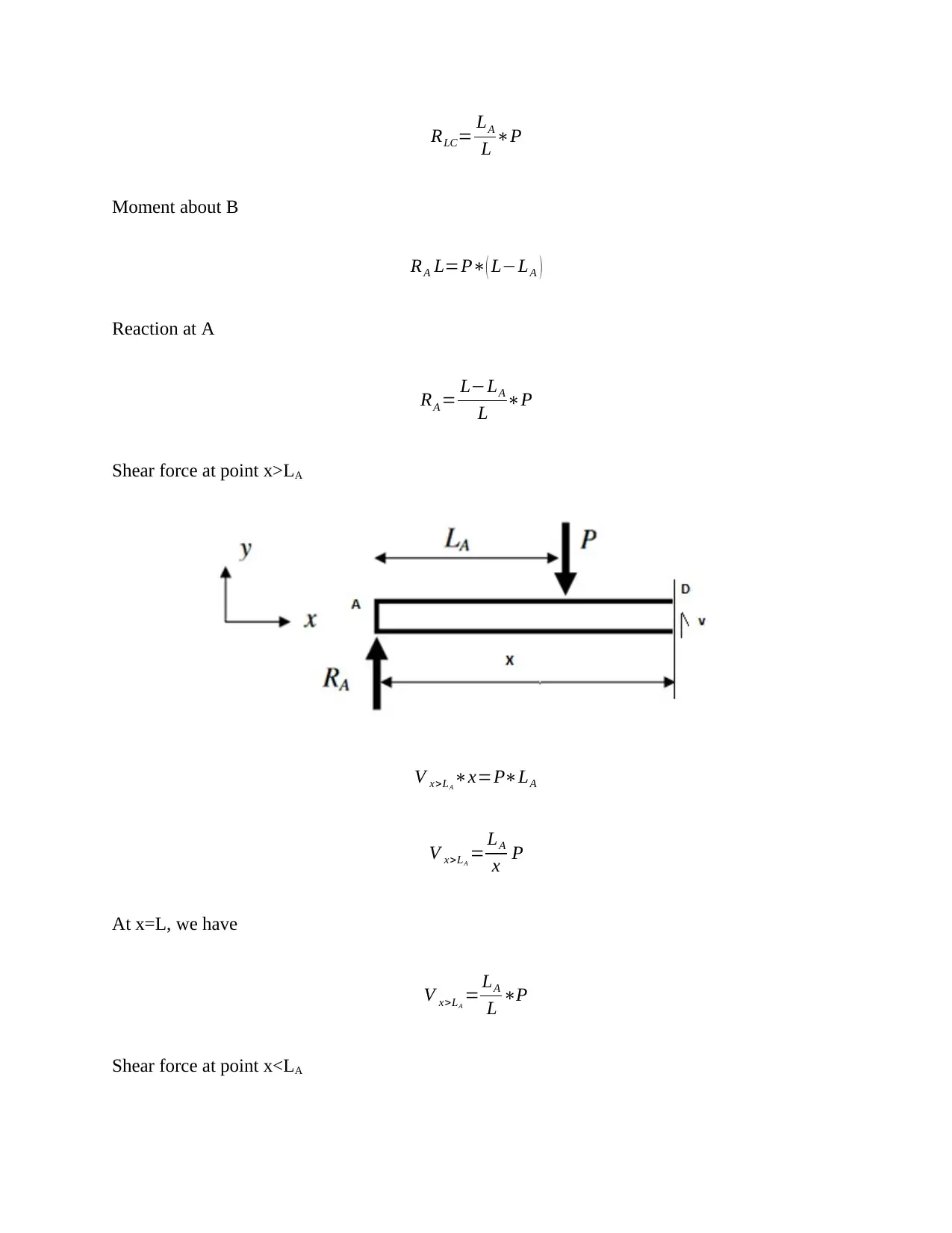
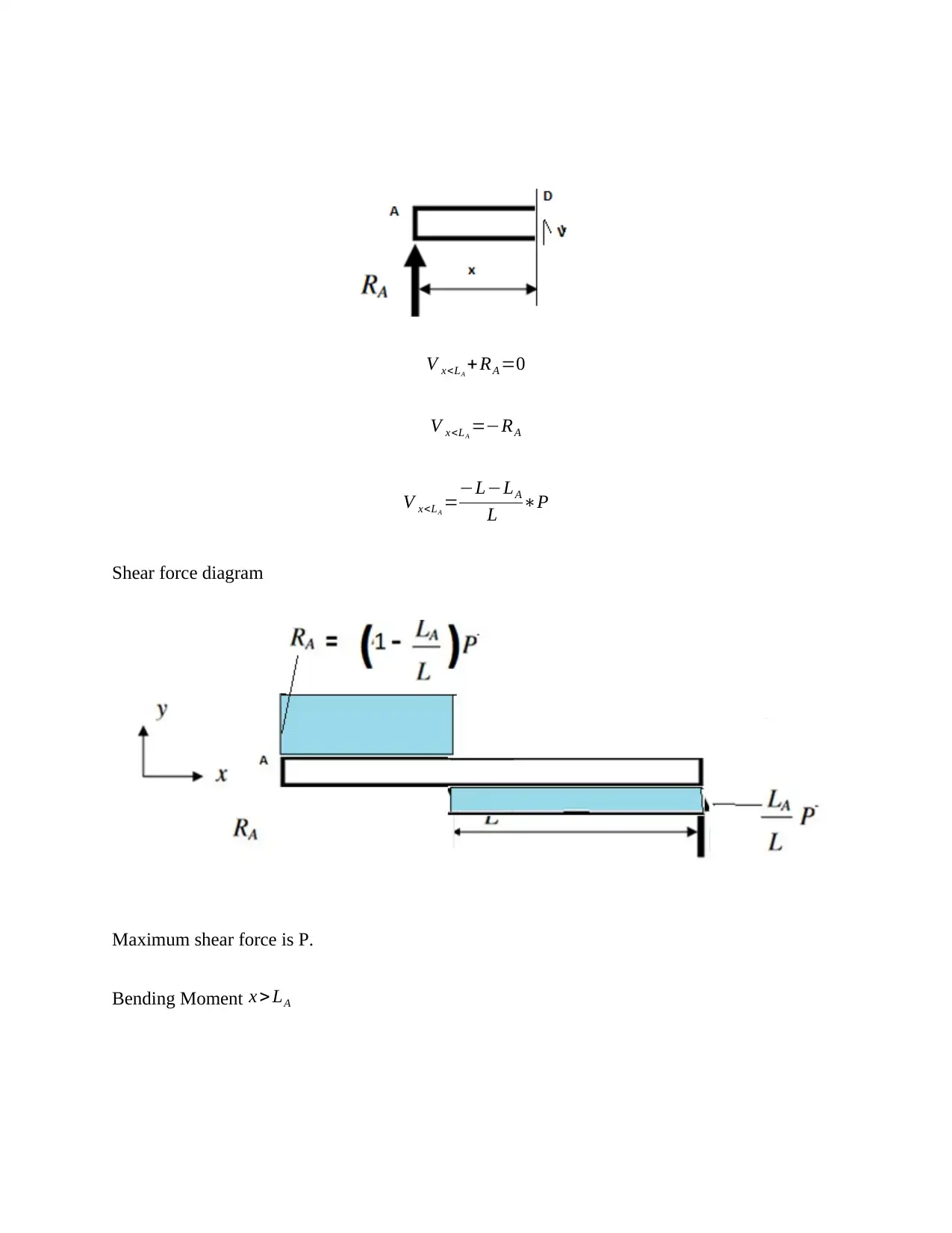
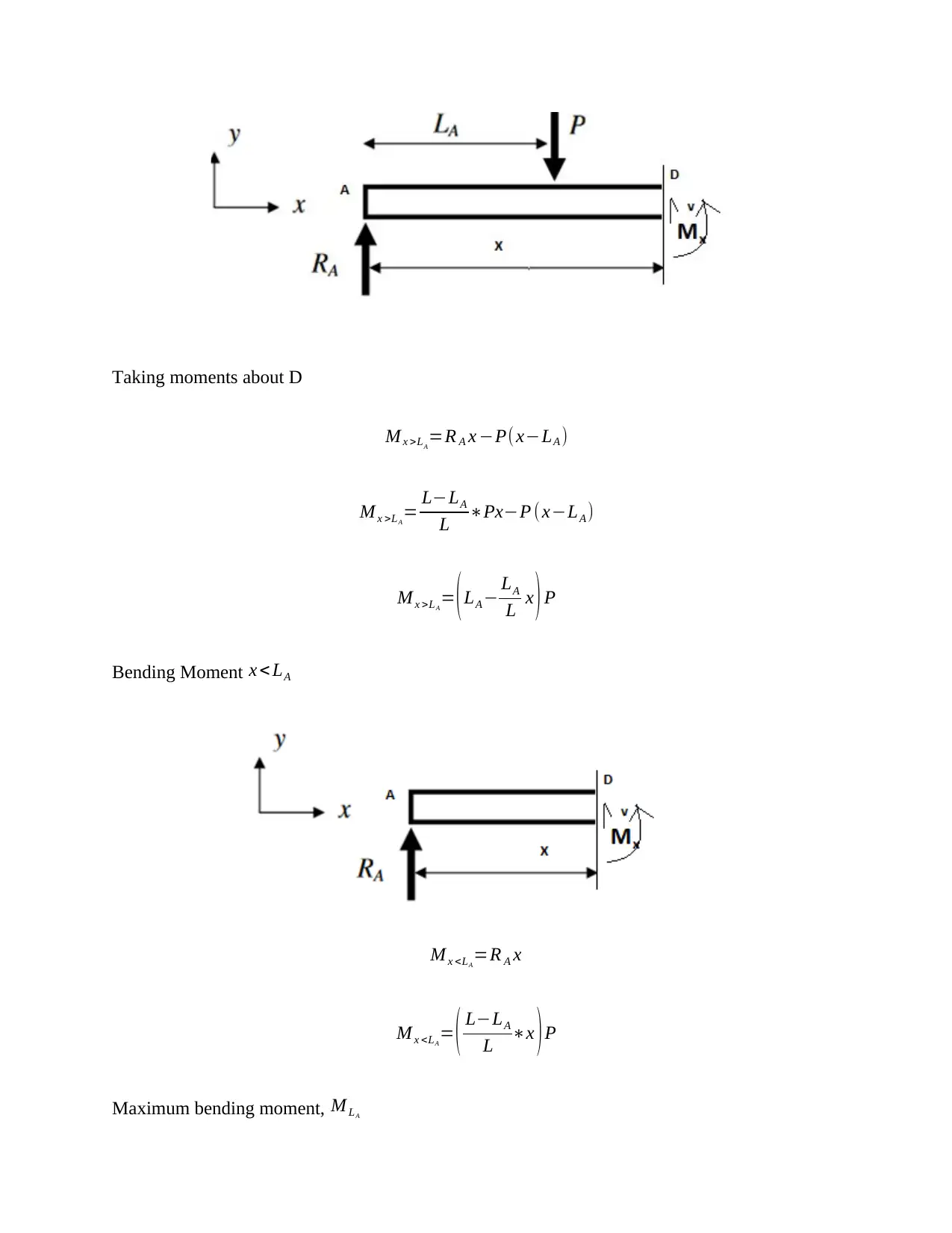
This report presents a detailed analysis of a simply supported, hollow beam subjected to a three-point bending test. The analysis incorporates analytical calculations, numerical methods, and finite element analysis (FEA) using CAD/CAE tools. The beam, made of structural steel, is 8000mm long and subject to a 7000N vertical load. The report covers key concepts such as bending moment, shear force, deflection, and stiffness, examining the influence of various parameters like cross-sectional dimensions, material properties, and support conditions. Calculations include determining reactions, shear forces, and bending moments, as well as the second moment of area and maximum deflection. The report also explores the stiffness matrix and its relationship to beam parameters. The findings are presented in a structured format, including figures and equations, to illustrate the beam's behavior under load, and to ensure the stress constraint of 140MPa and a deflection constraint of L/1000 are met. The analysis is based on the application of a ceramic coated aluminum allow shaft and aluminum alloy shaft.


1 out of 17
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.