FIR Filter Design and Implementation Assignment in Signal Processing
VerifiedAdded on 2021/11/19
|7
|495
|100
Homework Assignment
AI Summary
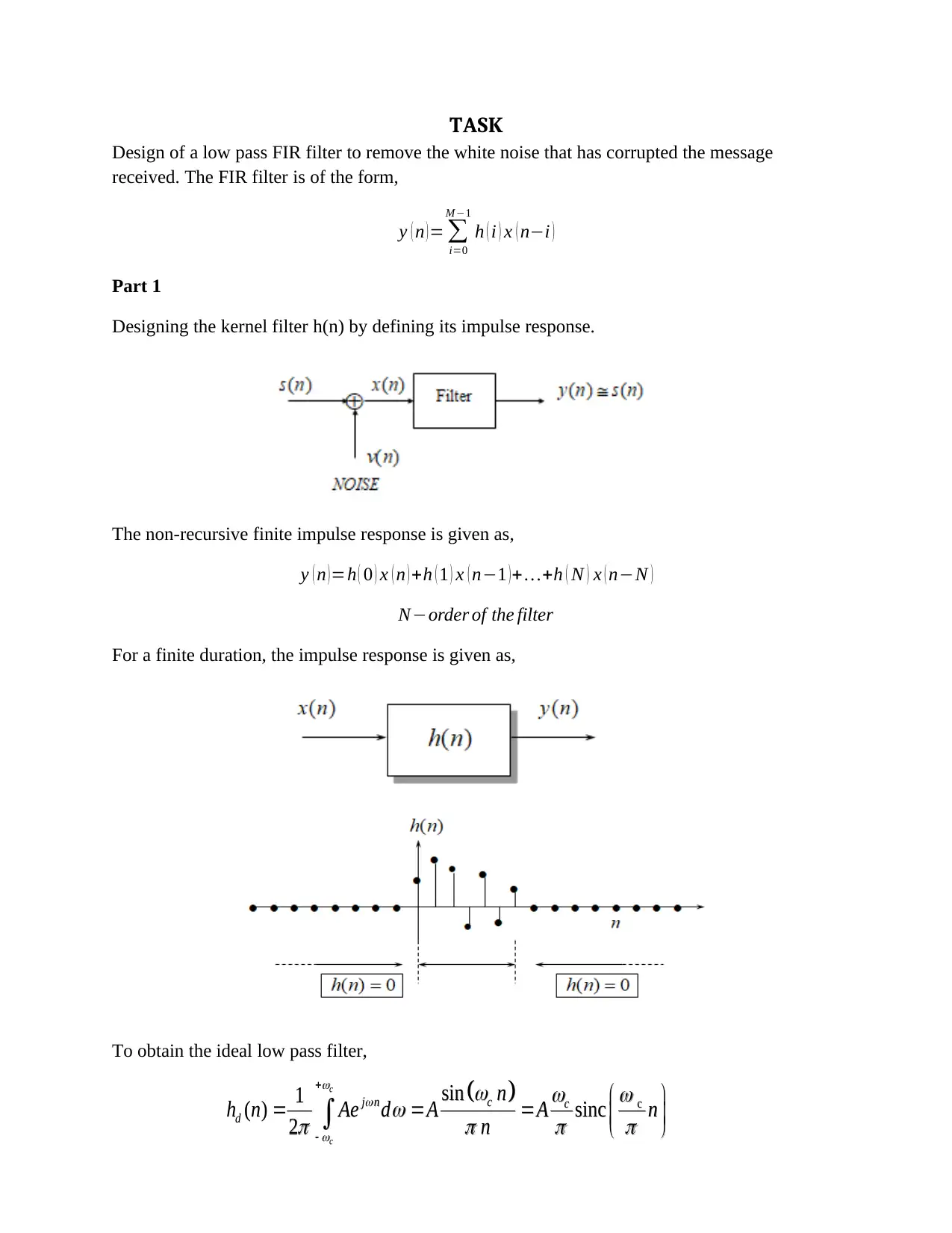
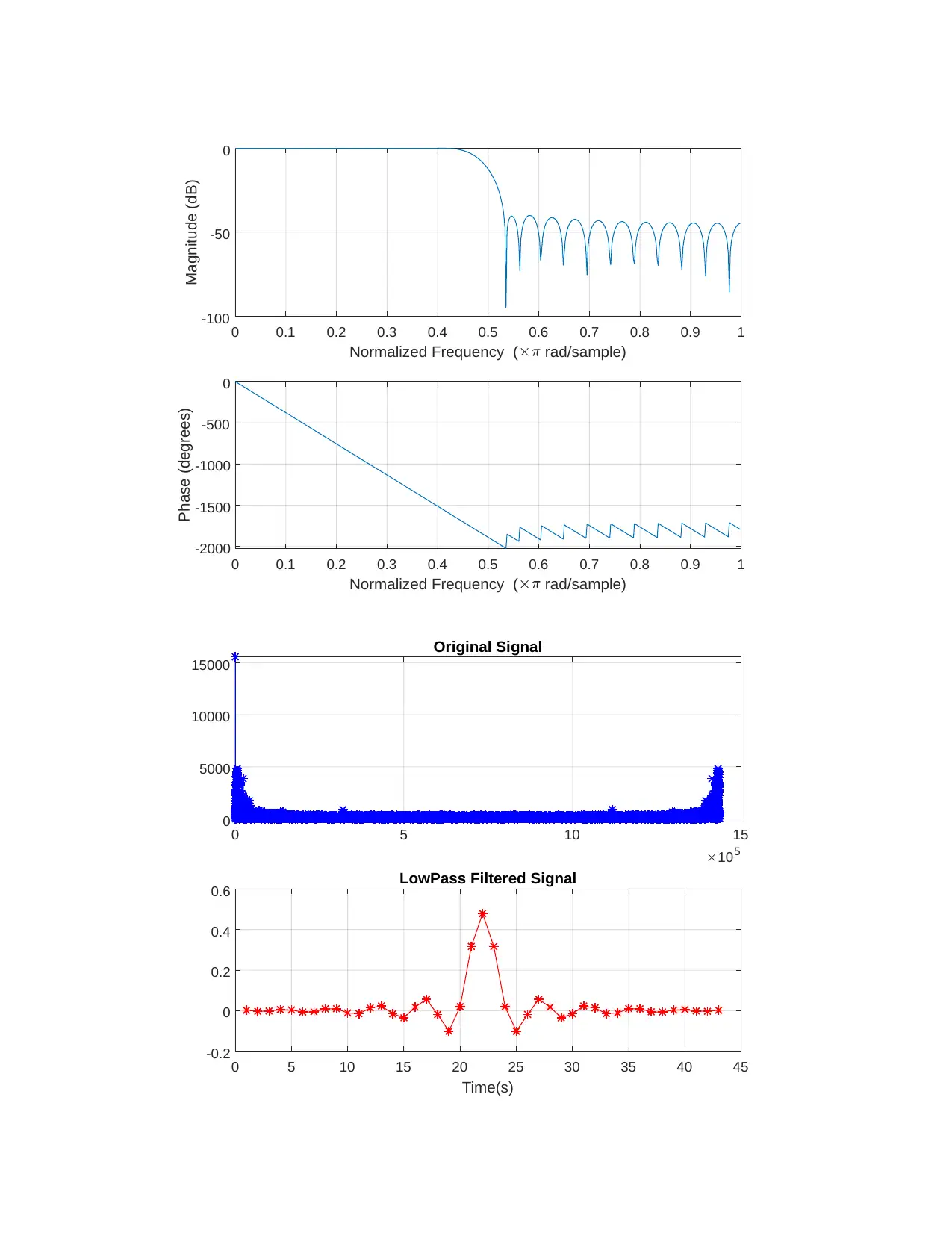
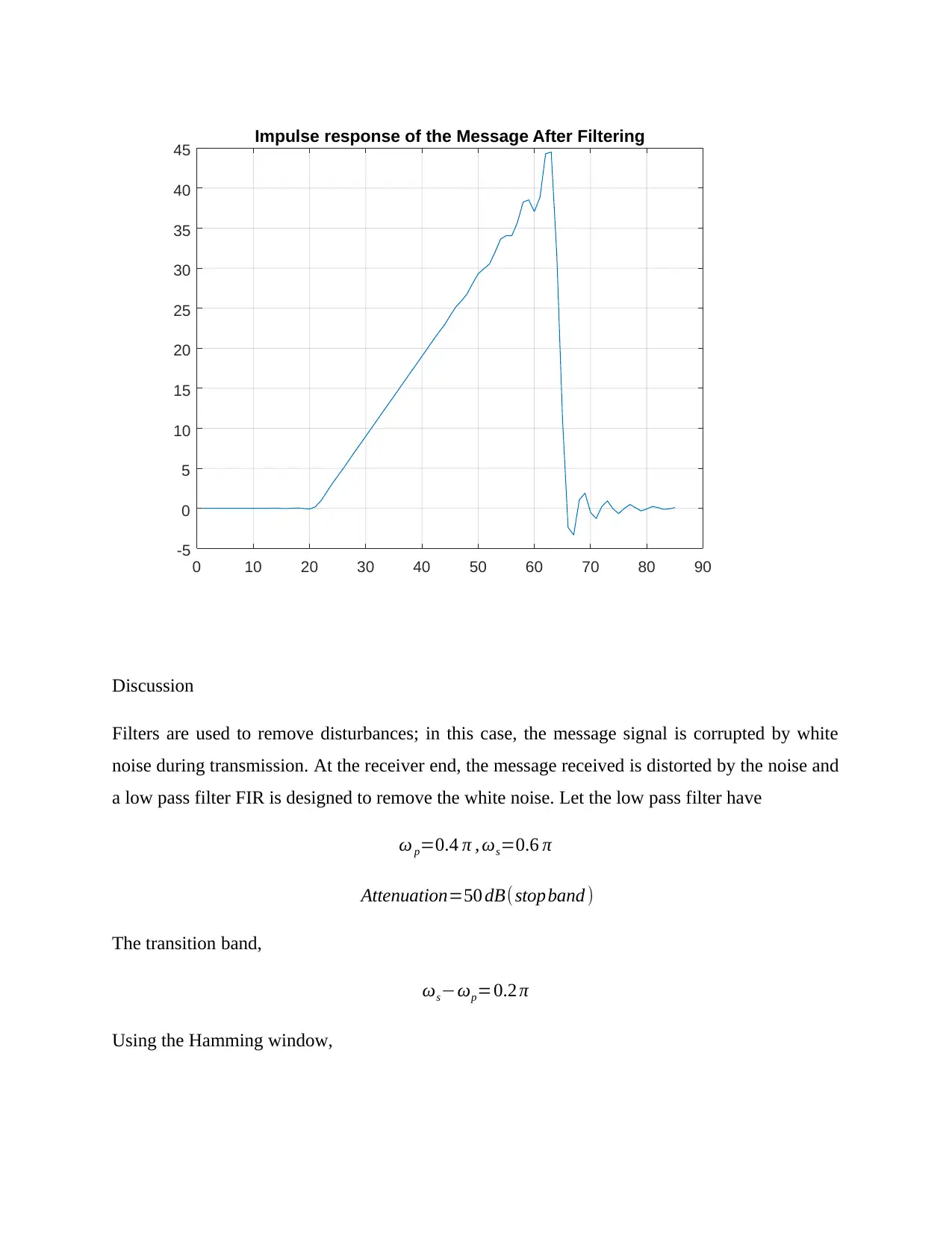
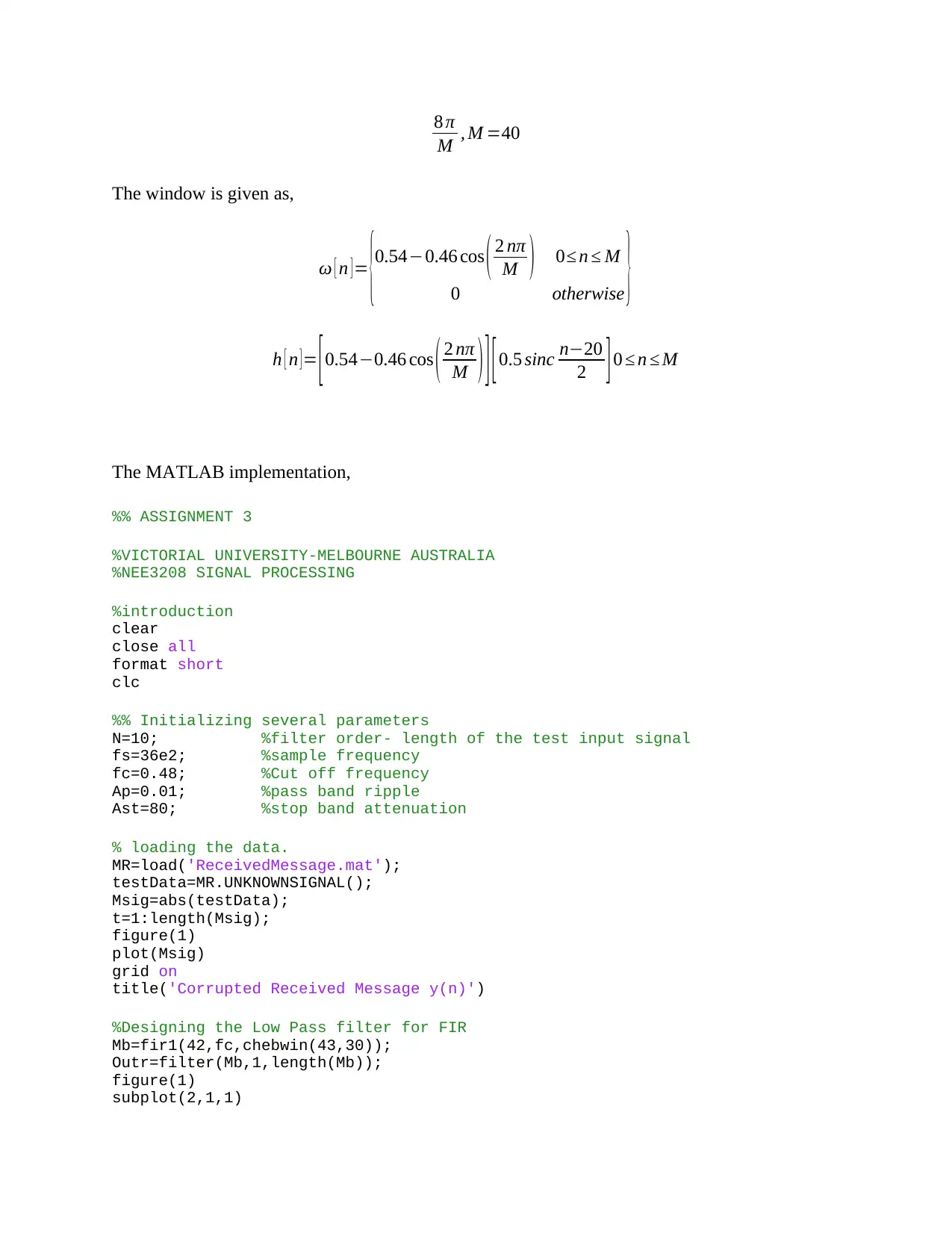
This assignment solution details the design and implementation of a Finite Impulse Response (FIR) filter to remove white noise from a corrupted message signal. The solution begins by outlining the theoretical background, including the derivation of the FIR filter's impulse response, considering the Hamming window to minimize spectral leakage. It then proceeds to evaluate the transfer function using the Discrete Fourier Transform (DFT) and analyzes the magnitude response. The solution further applies the filter in both the frequency and time domains to the input signal, illustrating the filtering process and the effect on the signal. The MATLAB implementation is provided, including the necessary parameters, data loading, and the creation of a low-pass filter using the fir1 function. The assignment includes plots of the original signal, the filtered signal, and the impulse response of the filter, demonstrating the effectiveness of the filter in removing noise and restoring the original signal. The solution also discusses the transition band and the window size used in the filter design.


1 out of 7


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.