Advanced Thermal & Fluid Engineering: CFD Simulation of Cylinder
VerifiedAdded on 2023/06/11
|31
|4457
|143
Project
AI Summary
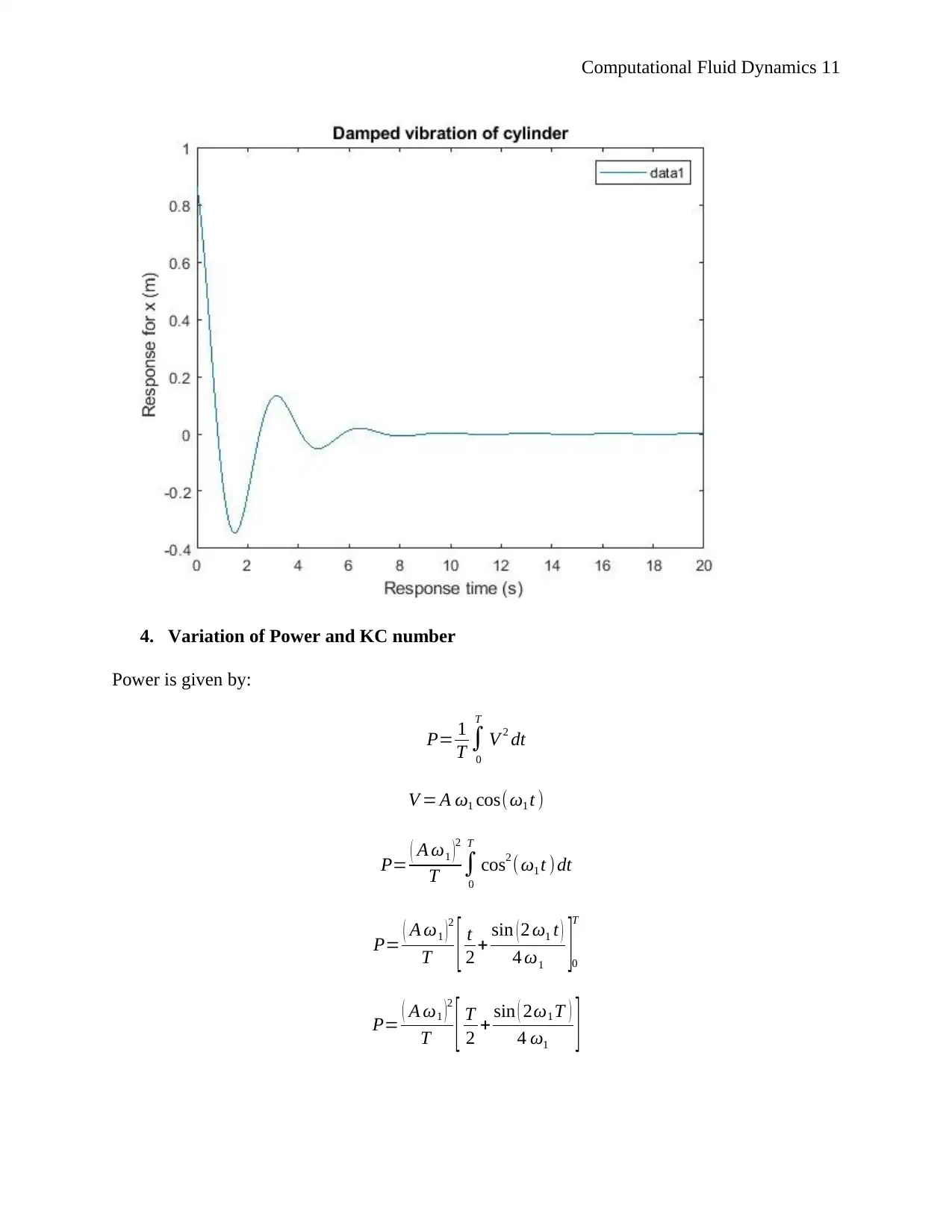
This project provides a detailed solution to a Computational Fluid Dynamics (CFD) assignment involving two primary parts: a simple initial value problem concerning the equation of motion of a cylinder and a one-dimensional convection-diffusion problem. The first part includes deriving the equation of motion for a cylinder subjected to water flow, developing a numerical method using Euler-Runge Kutta and Finite Difference Method (FDM) to predict the cylinder's vibration, presenting Matlab code for simulation, and analyzing the variation of power with the Keulegan-Carpenter (KC) number and damping coefficient (C). It also includes time history plots for displacement, velocity, and power. The second part addresses the convection-diffusion equation, solved using finite difference methods. Desklib offers students access to this solved assignment and many other resources for academic support.






1 out of 31
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.