EE Project: Design and Simulation of a Flyback Converter
VerifiedAdded on 2022/09/07
|6
|753
|18
Project
AI Summary
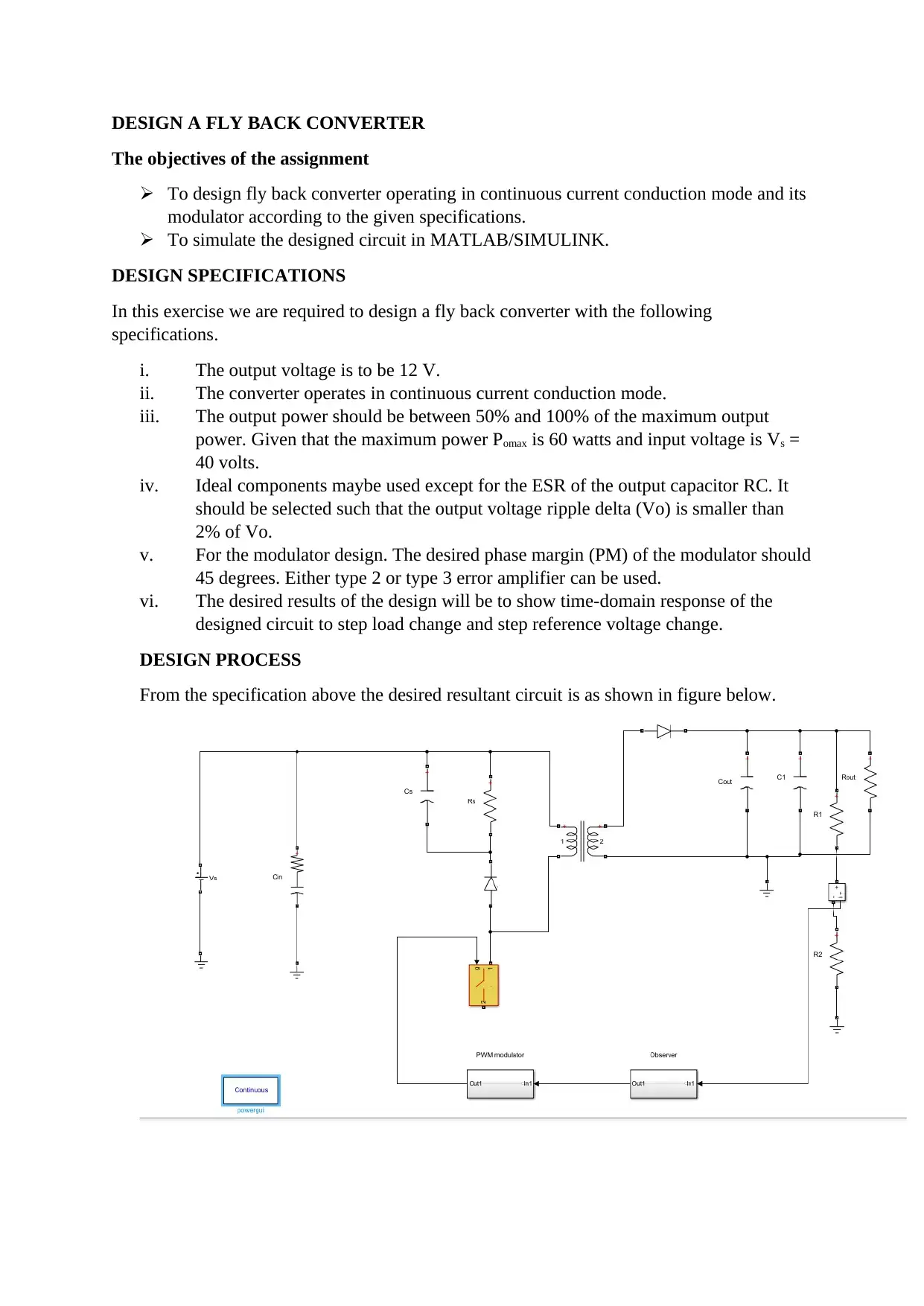
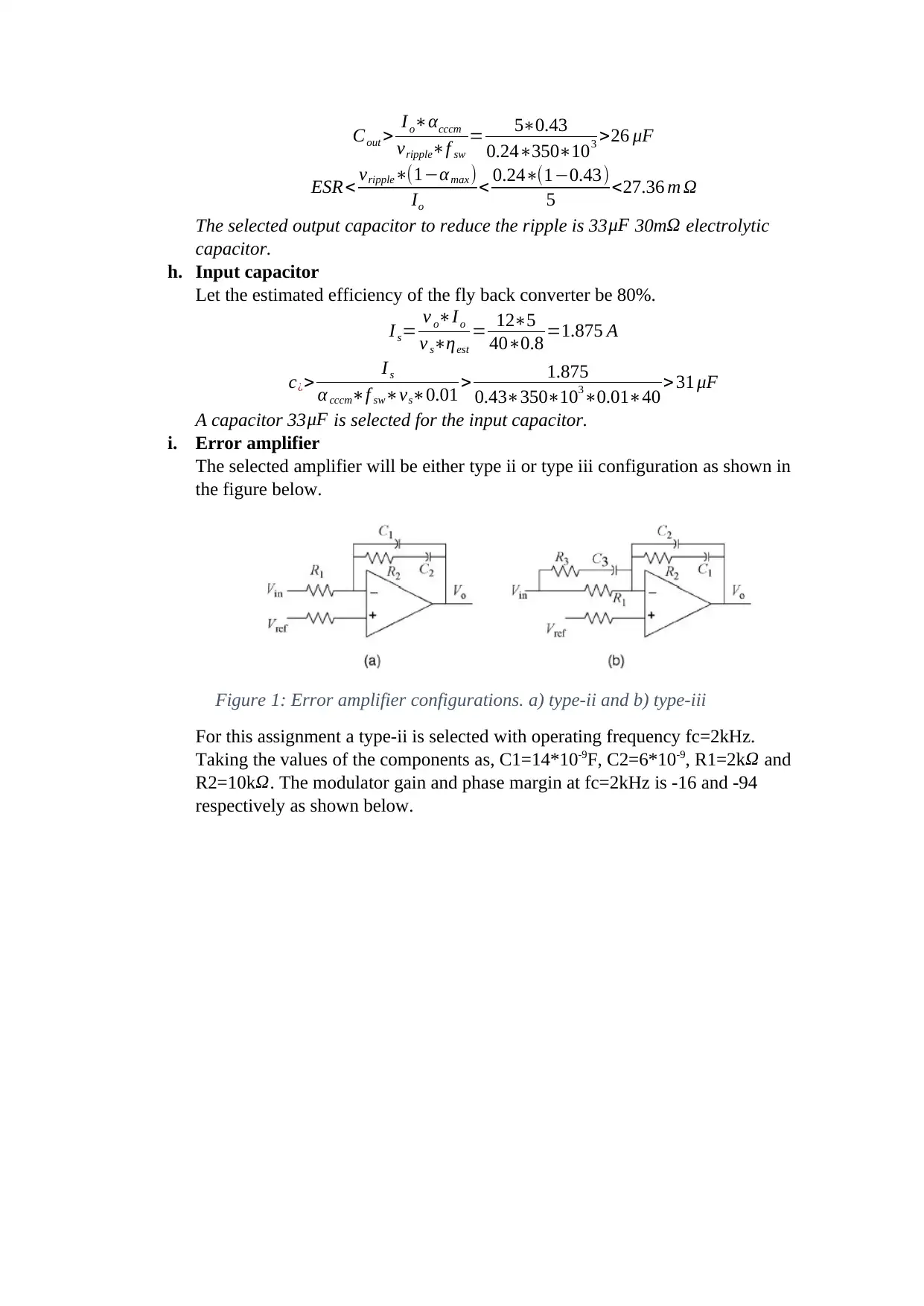
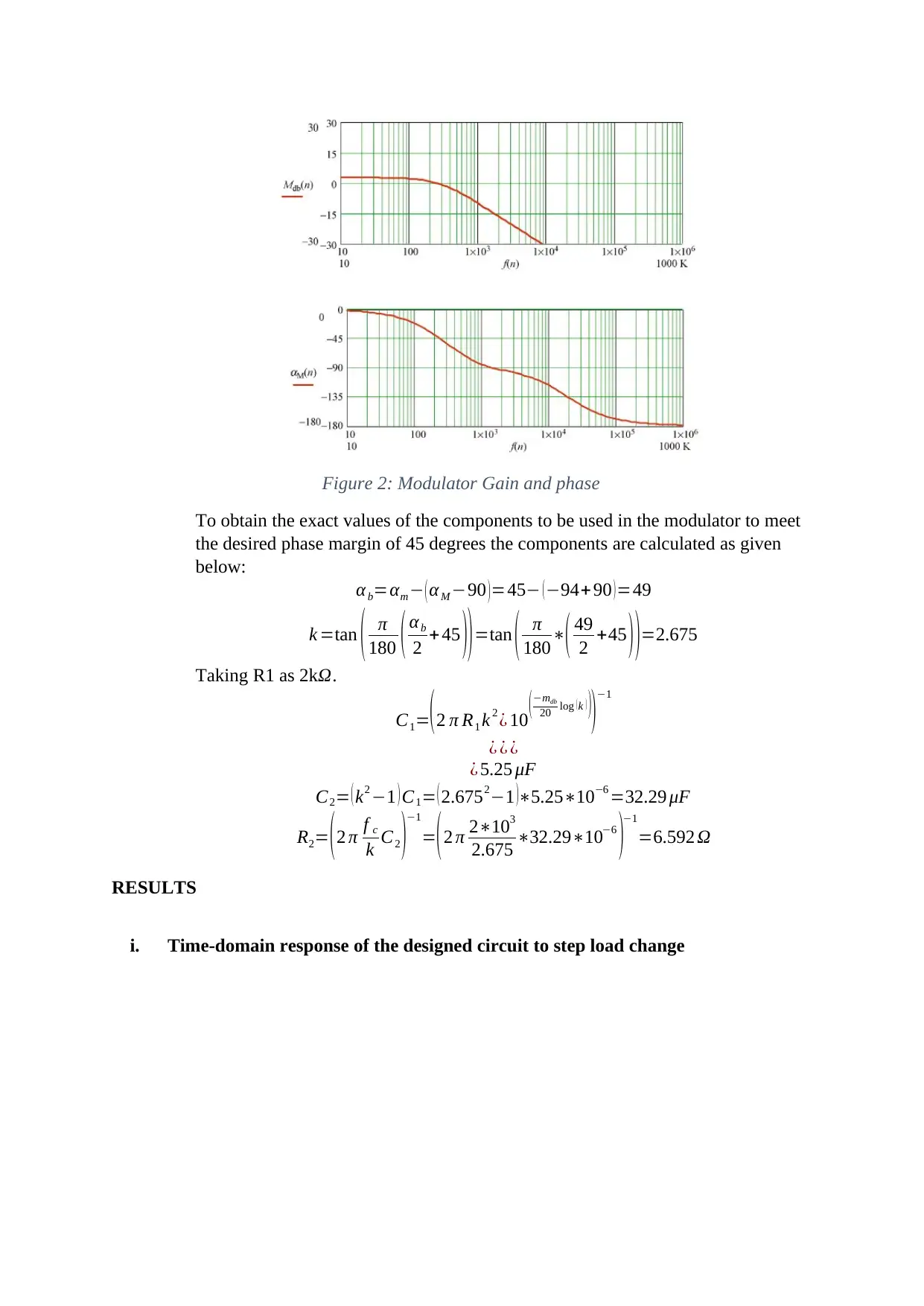
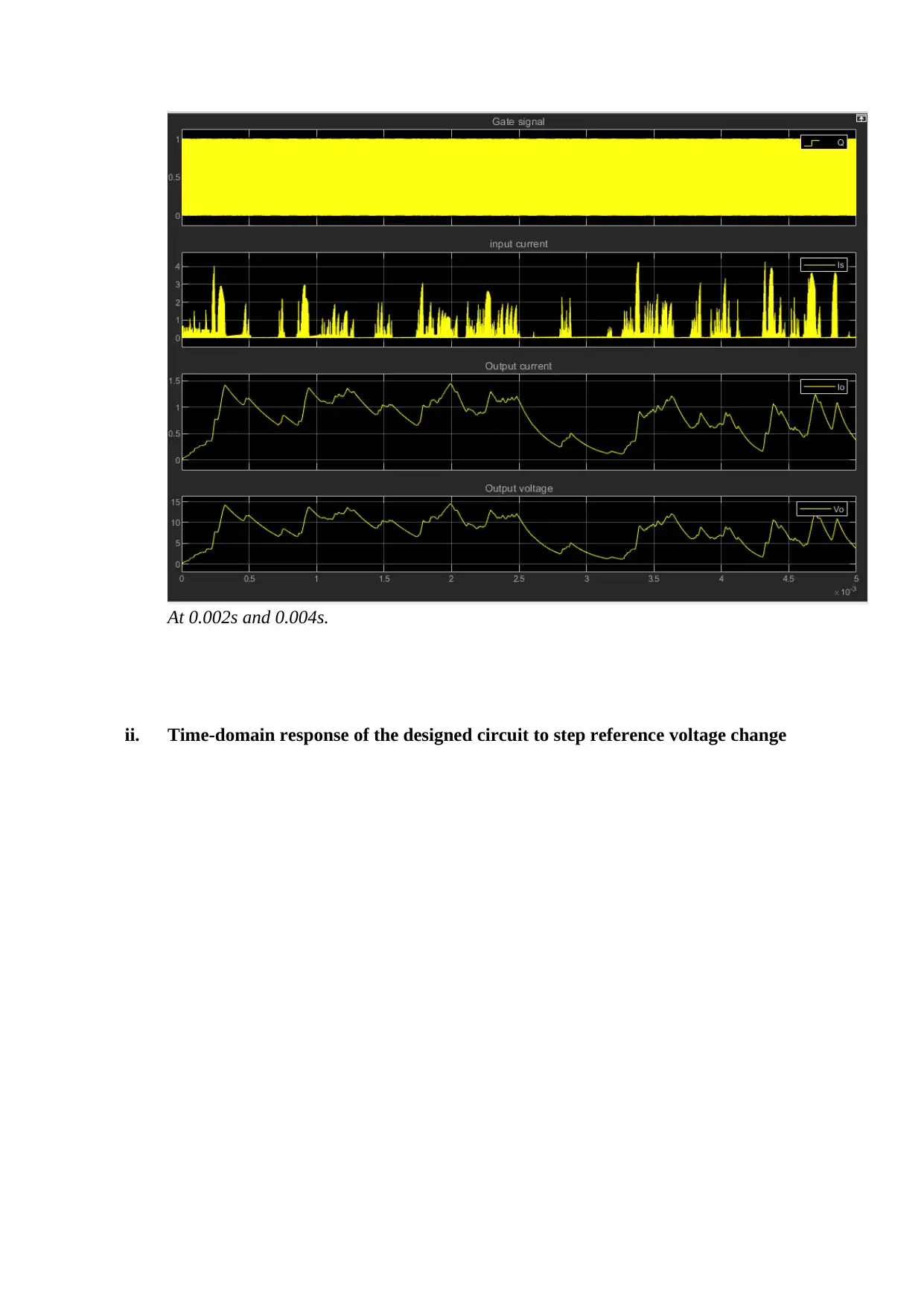
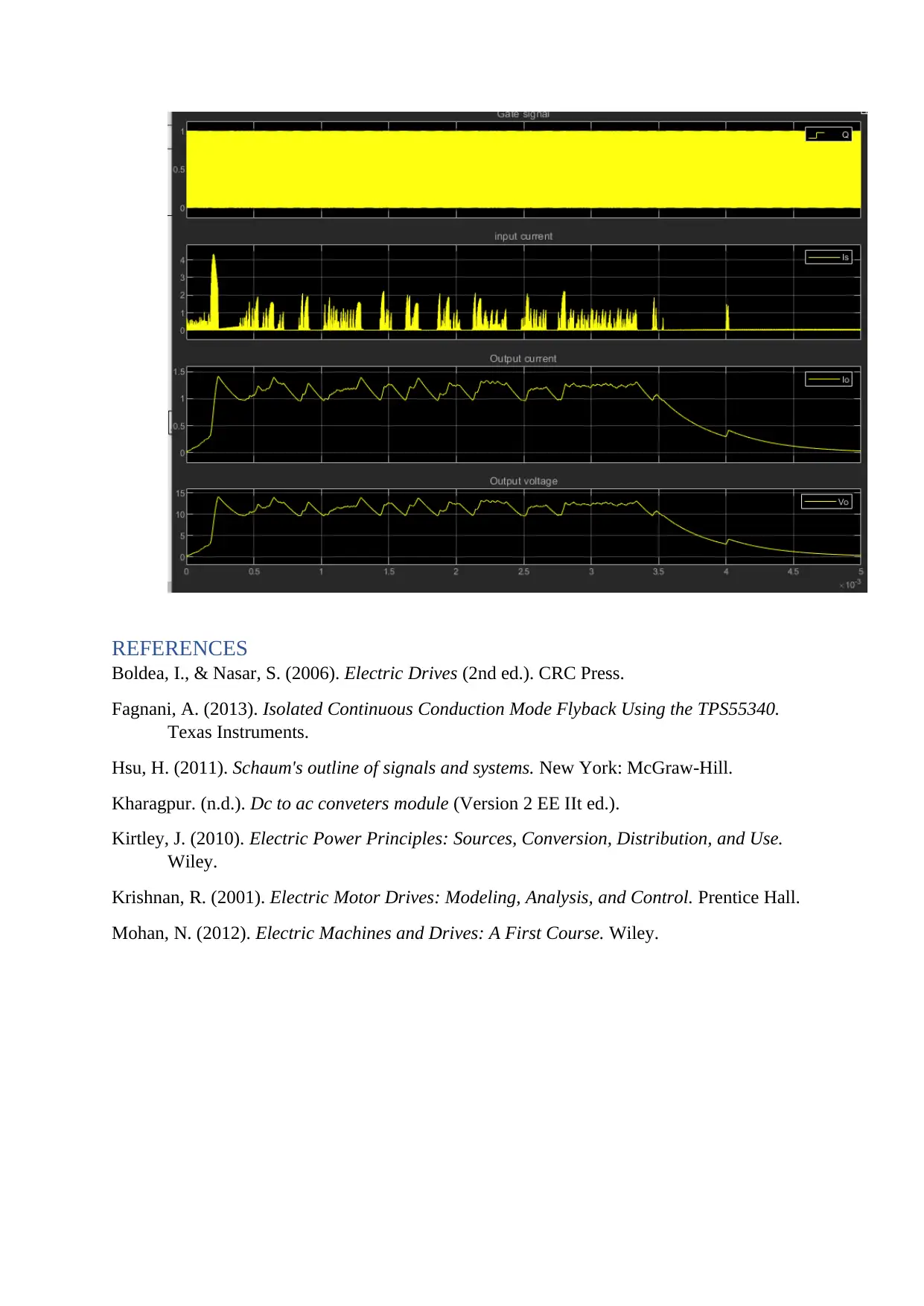
This assignment details the design and simulation of a flyback converter operating in continuous current conduction mode, adhering to specific output voltage, power, and input voltage specifications. The design process involves calculations for switching frequency, transformer turns ratio, MOSFET voltage stress, snubber circuit components, output and input capacitors, and error amplifier configuration. The design utilizes a type-II error amplifier and aims for a 45-degree phase margin. The circuit is simulated in MATLAB/SIMULINK, and the results include time-domain responses to step load changes and step reference voltage changes. References to relevant literature are also provided. This project demonstrates a comprehensive approach to power electronics converter design and simulation, covering key aspects of component selection, circuit analysis, and performance evaluation.

1 out of 6
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.