Robotics Homework: Forward Kinematics and DH Parameters Code
VerifiedAdded on 2022/08/16
|4
|961
|13
Homework Assignment
AI Summary
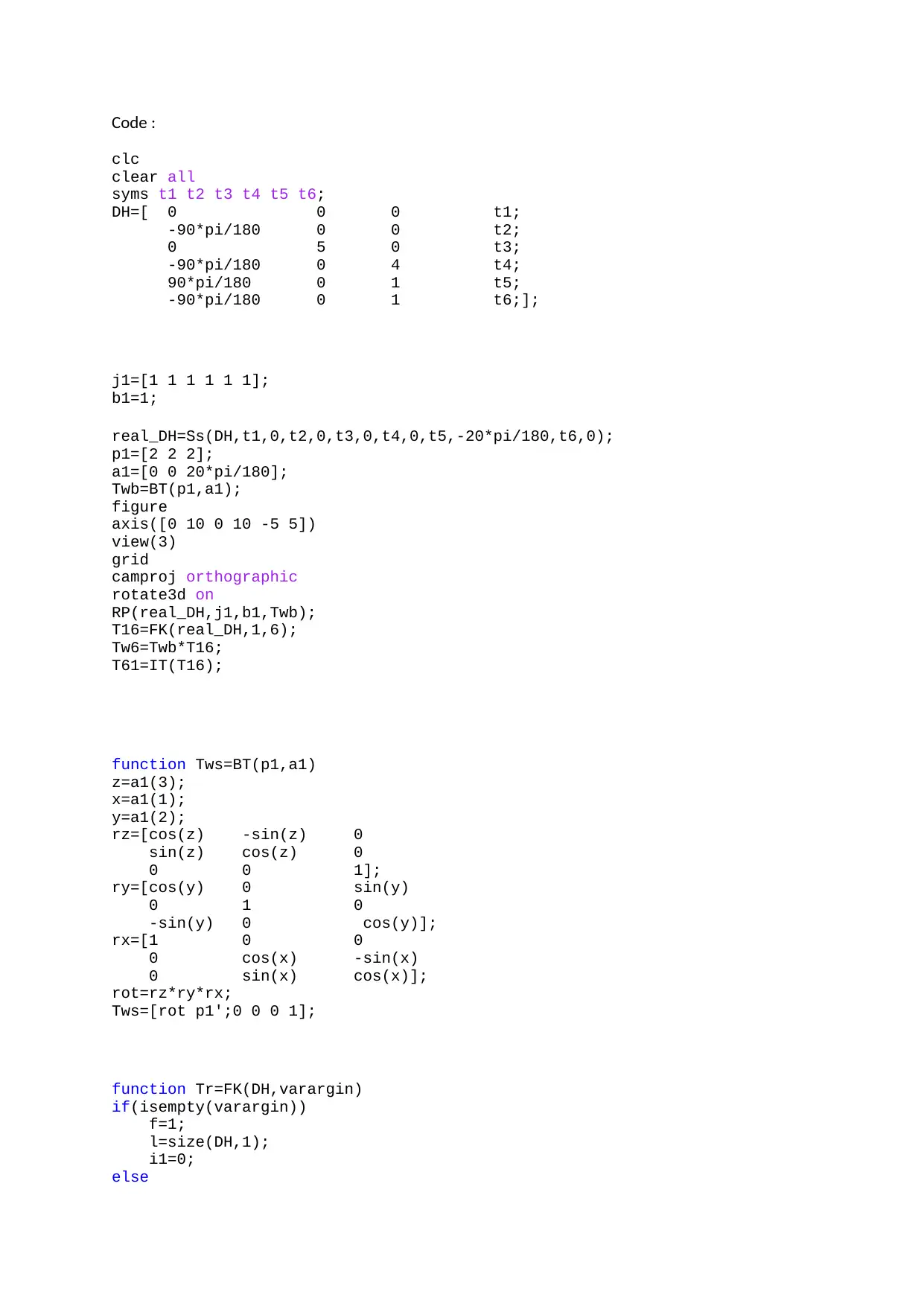
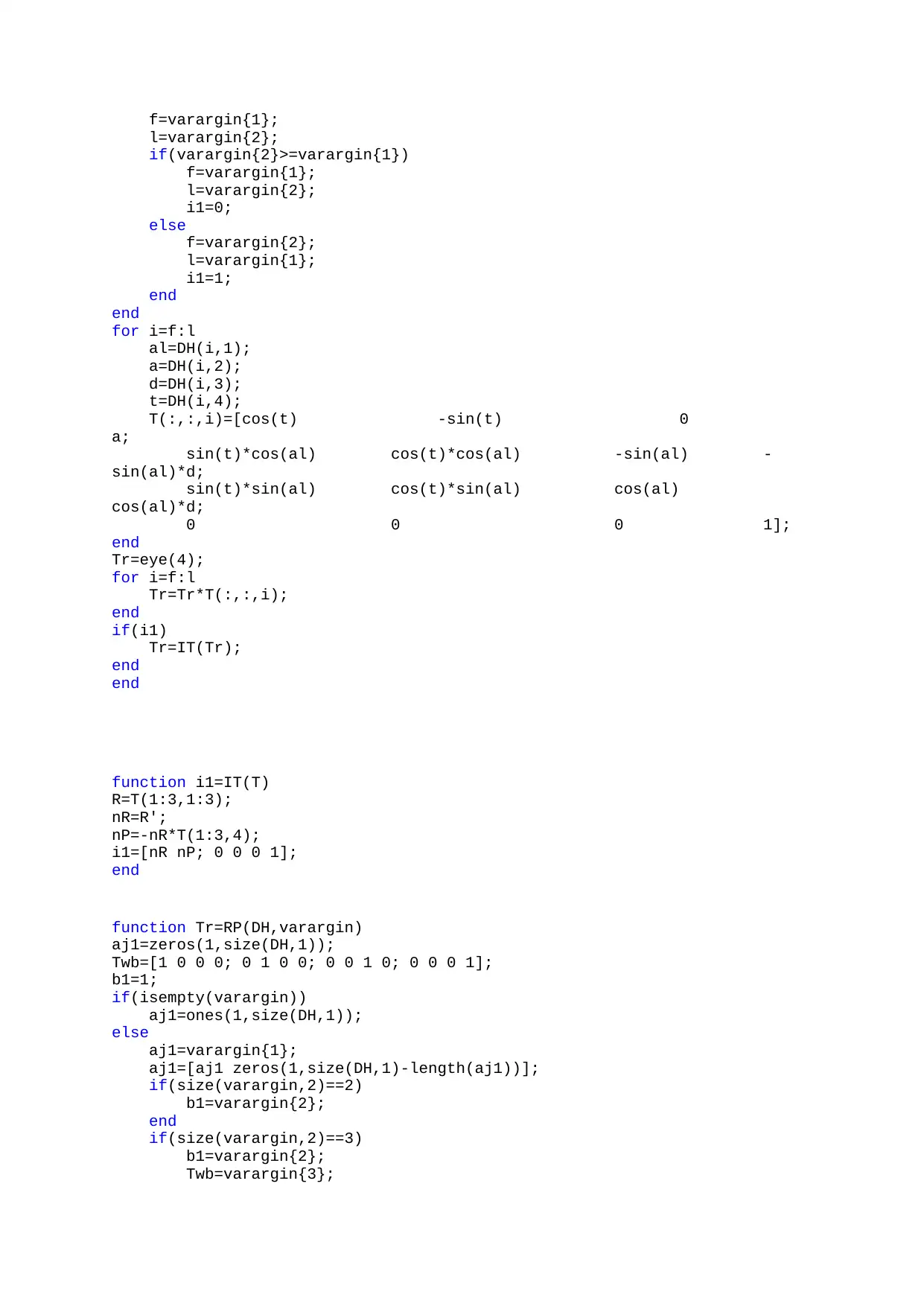
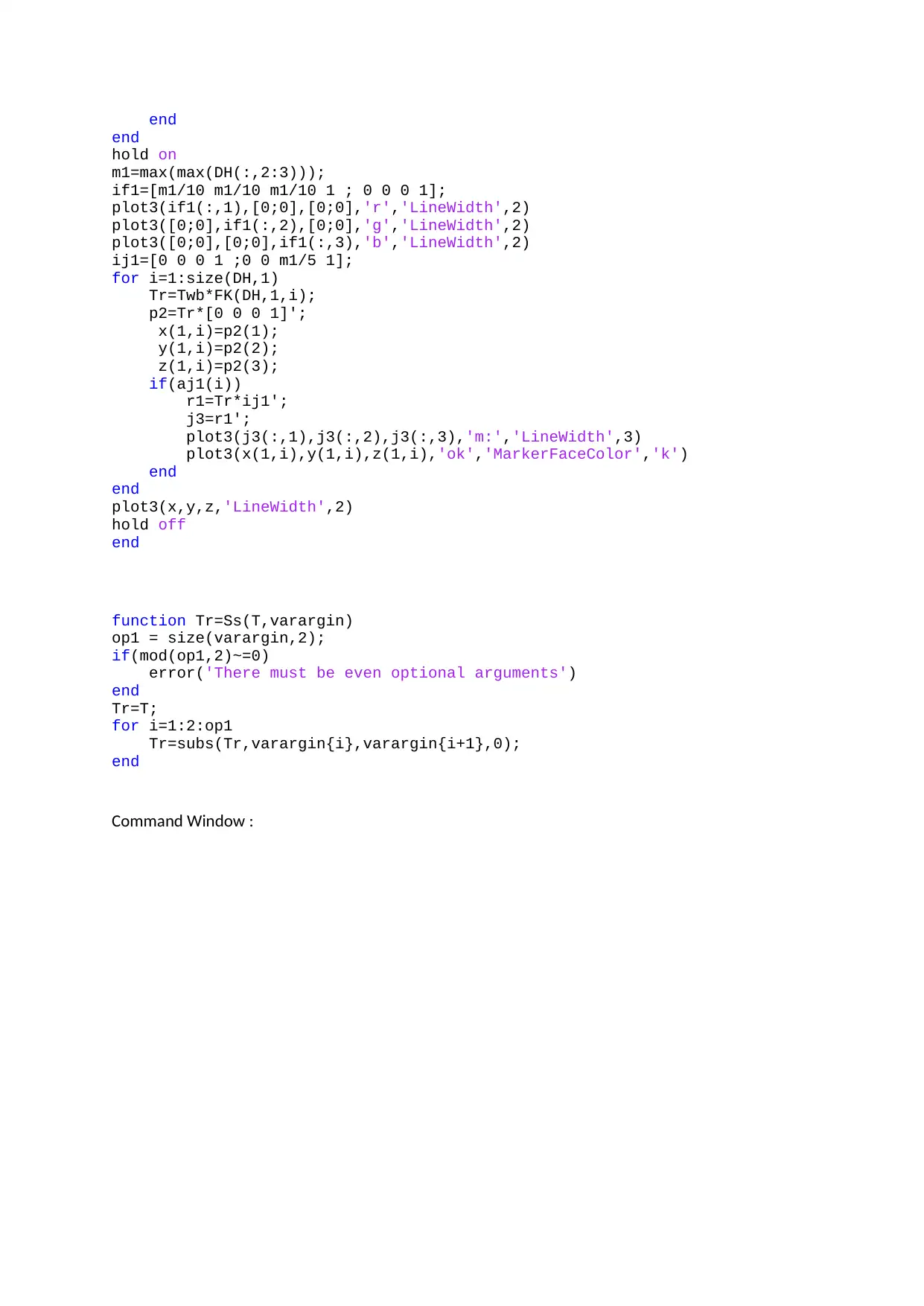
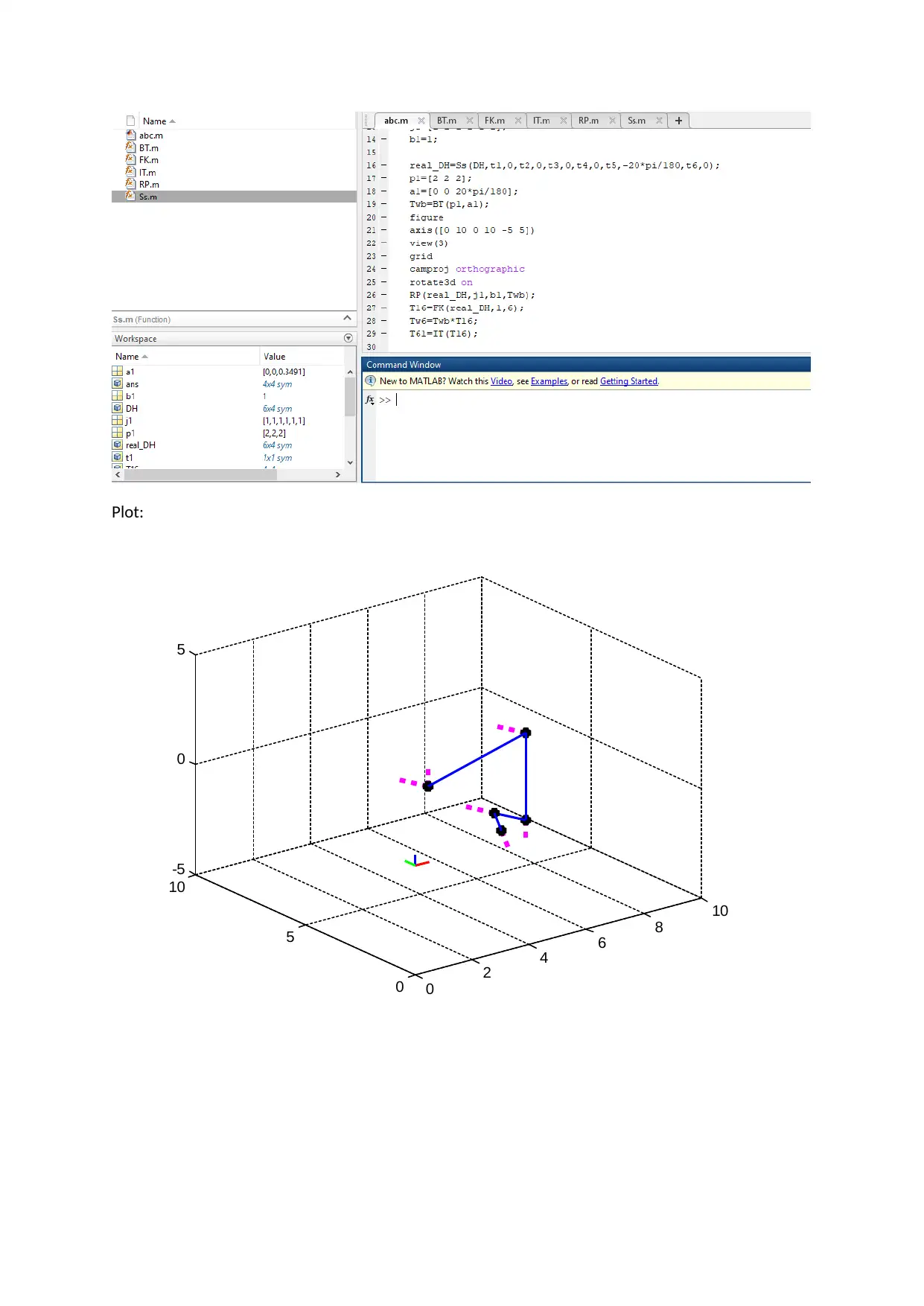
This assignment involves developing MATLAB code to solve a robotics problem related to forward kinematics and the Denavit-Hartenberg (DH) parameters. The code defines DH parameters, calculates transformation matrices, and implements forward kinematics to determine the position and orientation of a robot's end-effector. The solution includes functions for base transformation (BT), forward kinematics (FK), inverse transformation (IT), and robot plotting (RP), along with a function to substitute values into symbolic expressions (Ss). The code aims to address an error encountered during the substitution process and provides a complete solution for visualizing and analyzing the robot's motion. The assignment also includes a command window output, demonstrating the execution of the code and the resulting plot.
1 out of 4
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.