Intelligent Humanoid Robot System: AI Design and Implementation
VerifiedAdded on 2022/08/28
|10
|3125
|18
Project
AI Summary
This project report details the development of an intelligent humanoid robotic system, emphasizing the application of artificial intelligence (AI) and machine learning techniques. The system is designed to achieve dynamic walking and facilitate human-robot interaction. The project incorporates a distributed control architecture with 41 degrees of freedom to mimic human-like movements. Key design considerations include anthropomorphic shape, lightweight construction, and efficient power consumption. The report explains the use of DC motors and harmonic drive gears for precise control, along with the integration of sensory devices and wireless communication. Machine learning, specifically supervised and reinforcement learning, is employed to train the robot's walking gait using artificial neural networks (ANNs). The General-to-Particular (G2P) algorithm is used, involving motor babbling, exploration, and exploitation phases to optimize movement. The report discusses the implementation of the ANN using MATLAB and the Deep Learning Toolbox. The evaluation section highlights the system's reliability, dynamic walking capabilities, and image recognition abilities. The report also acknowledges the limitations of the AI algorithms, particularly their reliance on the quality of the training data and the absence of emotional intelligence.
Artificial Intelligence and Machine Learning
Introduction:
The study of humanoid robots includes various fields like artificial intelligence (Wortham, et.
al. , 2016), development of hardware (Song & Lee, 2015) as well as the interaction of the
humans and robots (Chen,et. al. , 2012). In the twenty first century, there is a need to develop
robots which are human – friendly because the future robots need to interact with the human
beings living in a society. Robots were used in industries for the assembly of various parts
and other activities (Kaljun & Dolšak, 2012). But now, the advanced form of robots must be
able to speak, walk as well as recognise others (Gretzel, 2011). Humanoid robots have many
similarities to the human beings (Clerc,2014). However, humanoid robots are very expensive,
complicated and unstable in nature (Li, et. al. , 2011). Here, the control system is being
considered for the motion (real – time) on the basis of feedback provided from sensory input.
The actuators are needed for torque, power and speed purpose. The range of movable joint
angle must be good to make the humanoid resemble a human being more.
The fetch – carry robot can be developed for helping the people who are physically impaired
while working in an office (Wortham, et. al., 2016 ),. As per Widodo, Shim, et. al. ,2011), the
robot’s platform can be enhanced by using a natural language interface or the graphical
interface. The ISR (Intelligent Service Robot) can be designed for helping the users, helping
fetch and deliver objects in the office environment (Anastasi, Corucci & Marcelloni, 2011).
For developing proper social interaction for robots and people, some degrees of
anthropomorphism can be employed in the physical design as well as behaviour of the robot
(Song & Lee, 2015). If the robot enters a social space, then we unknowingly present our
interpretation over their actions (Chen, et. al., 2011). This intensity of anthropomorphising
gives an opportunity to develop the social robots (Shih, et. al. ,2011). The robots need to
become a part of the social environment as well as the physical (Gretzel, 2011).
Scaramuzza, Achtelik, Doitsidis, Friedrich, Kosmatopoulos, Martinelli & Gurdan (2014)
have shown that the overall social understanding can be improved by adding the human like
Introduction:
The study of humanoid robots includes various fields like artificial intelligence (Wortham, et.
al. , 2016), development of hardware (Song & Lee, 2015) as well as the interaction of the
humans and robots (Chen,et. al. , 2012). In the twenty first century, there is a need to develop
robots which are human – friendly because the future robots need to interact with the human
beings living in a society. Robots were used in industries for the assembly of various parts
and other activities (Kaljun & Dolšak, 2012). But now, the advanced form of robots must be
able to speak, walk as well as recognise others (Gretzel, 2011). Humanoid robots have many
similarities to the human beings (Clerc,2014). However, humanoid robots are very expensive,
complicated and unstable in nature (Li, et. al. , 2011). Here, the control system is being
considered for the motion (real – time) on the basis of feedback provided from sensory input.
The actuators are needed for torque, power and speed purpose. The range of movable joint
angle must be good to make the humanoid resemble a human being more.
The fetch – carry robot can be developed for helping the people who are physically impaired
while working in an office (Wortham, et. al., 2016 ),. As per Widodo, Shim, et. al. ,2011), the
robot’s platform can be enhanced by using a natural language interface or the graphical
interface. The ISR (Intelligent Service Robot) can be designed for helping the users, helping
fetch and deliver objects in the office environment (Anastasi, Corucci & Marcelloni, 2011).
For developing proper social interaction for robots and people, some degrees of
anthropomorphism can be employed in the physical design as well as behaviour of the robot
(Song & Lee, 2015). If the robot enters a social space, then we unknowingly present our
interpretation over their actions (Chen, et. al., 2011). This intensity of anthropomorphising
gives an opportunity to develop the social robots (Shih, et. al. ,2011). The robots need to
become a part of the social environment as well as the physical (Gretzel, 2011).
Scaramuzza, Achtelik, Doitsidis, Friedrich, Kosmatopoulos, Martinelli & Gurdan (2014)
have shown that the overall social understanding can be improved by adding the human like
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
features to the robot so that it can interact with the people socially. There must be a head,
eyes as well as mouth which include the anthropomorphic characteristics (Li, Gu, Chen &
Zhu, 2011). The robot must be able to complete its self-goals as well as the community goals
(Li, Zhou, Yang, & Zheng, 2016). In order to use anthropomorphism in the robot system, a
detailed study of the human – robot interaction needs to be done.
All the human qualities must not be added as it may pose a problem like the robot becoming
selfish (Kitano, Kobayashi, Sakakibara, Kawano, Sakai, Uematsu & Murai, 2012). The major
aim must be to reduce the gap between human beings and the machines which use the digital
information. The social robots are expected to show Artificial Intelligence (AI) features.
There are 2 aspects of AI – Strong AI and Weak AI (Khooban, 2014). The strong AI can
make it feasible to produce an artificial system which duplicates the human intelligence. The
weak AI means that we can only simulate aspects of human intelligence (Lin & Li, 2013).
Earlier the robots were used in the field of production lines for carrying out the assembly
operations (McDuff, Karlson, Kapoor, Roseway & Czerwinski, 2012). But now they have to
be present in a social environment where they are expected to respond and adapt to the moods
of people (Chen, Shih & Chou, 2012). The concept of ‘emotional intelligence’ has to be
developed here (Ongenae, Duysburgh, Verstraete, Sulmon, Bleumers, Jacobs & De, 2012). It
can measure various parameters and respond accordingly. According to Clerc (2014), the
humans are trying to build a robot which is most similar to themselves.
Aims / Objectives:
The goal is to develop an intelligent humanoid robotic system. It must be reliable and able to
implement dynamic walking and must support interaction with robots and human beings. It
must include the concept of Artificial Intelligence (AI), be able to recognise images and
implement proper navigation. The main focus lies on dynamic walking. The various
mechanical components use simple structures which are easy to machine using a 2 – D
process of simulation for walking.
eyes as well as mouth which include the anthropomorphic characteristics (Li, Gu, Chen &
Zhu, 2011). The robot must be able to complete its self-goals as well as the community goals
(Li, Zhou, Yang, & Zheng, 2016). In order to use anthropomorphism in the robot system, a
detailed study of the human – robot interaction needs to be done.
All the human qualities must not be added as it may pose a problem like the robot becoming
selfish (Kitano, Kobayashi, Sakakibara, Kawano, Sakai, Uematsu & Murai, 2012). The major
aim must be to reduce the gap between human beings and the machines which use the digital
information. The social robots are expected to show Artificial Intelligence (AI) features.
There are 2 aspects of AI – Strong AI and Weak AI (Khooban, 2014). The strong AI can
make it feasible to produce an artificial system which duplicates the human intelligence. The
weak AI means that we can only simulate aspects of human intelligence (Lin & Li, 2013).
Earlier the robots were used in the field of production lines for carrying out the assembly
operations (McDuff, Karlson, Kapoor, Roseway & Czerwinski, 2012). But now they have to
be present in a social environment where they are expected to respond and adapt to the moods
of people (Chen, Shih & Chou, 2012). The concept of ‘emotional intelligence’ has to be
developed here (Ongenae, Duysburgh, Verstraete, Sulmon, Bleumers, Jacobs & De, 2012). It
can measure various parameters and respond accordingly. According to Clerc (2014), the
humans are trying to build a robot which is most similar to themselves.
Aims / Objectives:
The goal is to develop an intelligent humanoid robotic system. It must be reliable and able to
implement dynamic walking and must support interaction with robots and human beings. It
must include the concept of Artificial Intelligence (AI), be able to recognise images and
implement proper navigation. The main focus lies on dynamic walking. The various
mechanical components use simple structures which are easy to machine using a 2 – D
process of simulation for walking.
Design of System:
The humanoid will have a total of 41 degrees of freedom (DOFs). A distributed type of
control architecture will be used for controlling all the joint axes properly. This provides an
efficient system with a decreased burden of computation on the main controller.
The basic points which have been kept in mind while designing the system are : the shape as
well as the movements must be like human, lower weight, small size and no backlash in
actuator, a simple kinematic design, lesser power consumed and a system which is self –
contained ( De-An, Jidong , Wei , Ying & Yu , 2011 ).
The DC motor as well as harmonic drive gears are used as they can be controlled easily and
also reduce the backlash. The various controllers, sensory devices as well as the batteries are
placed inside the system. A wireless LAN is used to carry out various operations using a
notebook PC. There needs to be optimization of the structure mechanically to decide the
shape as well as thickness (Kaljun & Dolšak, 2012). The design is such that the axes of all the
major joints meet at a single point. This gives a simple closed – form solution for the inverse
kinematics.
The Machine Learning can be employed for teaching a robot how to walk by training the
models. Deep learning is a type of machine learning model which can teach the robot to learn
by itself in a repeating manner. A large amount of quality data is needed for the same. The
experience gained while performing various experiments and in various regions like rugged
terrain, mud area, rough and uneven area. The supervised learning is used here. A 2-leg robot
needs more balancing factor than 4 leg robots. The legs must be trained move as left and right
in an fashion to proceed forward and backward when required. The data is given to the model
and then reinforcement learning is applied. The training of the neural networks is done on the
basis of weight and then checking of the movements is done based on the same. The result
needs to be maximized for efficiency. A positive reward is assigned in case of a correct
outcome and a negative reward is assigned in case of a wrong outcome obtained from the
image gyroscope and the network is then re – trained. This way, the robot’s leg is capable to
teaching itself in a very small time.
The movements can be controlled by the help of an Artificial Neural Network , ANN for
helping the robot. The reinforcement learning using the ANN as well as motor babbling are
combined, random movements are attempted by the system. The system learns the properties
by using a movement’s results obtained using the image gyroscope. A reward is given when a
The humanoid will have a total of 41 degrees of freedom (DOFs). A distributed type of
control architecture will be used for controlling all the joint axes properly. This provides an
efficient system with a decreased burden of computation on the main controller.
The basic points which have been kept in mind while designing the system are : the shape as
well as the movements must be like human, lower weight, small size and no backlash in
actuator, a simple kinematic design, lesser power consumed and a system which is self –
contained ( De-An, Jidong , Wei , Ying & Yu , 2011 ).
The DC motor as well as harmonic drive gears are used as they can be controlled easily and
also reduce the backlash. The various controllers, sensory devices as well as the batteries are
placed inside the system. A wireless LAN is used to carry out various operations using a
notebook PC. There needs to be optimization of the structure mechanically to decide the
shape as well as thickness (Kaljun & Dolšak, 2012). The design is such that the axes of all the
major joints meet at a single point. This gives a simple closed – form solution for the inverse
kinematics.
The Machine Learning can be employed for teaching a robot how to walk by training the
models. Deep learning is a type of machine learning model which can teach the robot to learn
by itself in a repeating manner. A large amount of quality data is needed for the same. The
experience gained while performing various experiments and in various regions like rugged
terrain, mud area, rough and uneven area. The supervised learning is used here. A 2-leg robot
needs more balancing factor than 4 leg robots. The legs must be trained move as left and right
in an fashion to proceed forward and backward when required. The data is given to the model
and then reinforcement learning is applied. The training of the neural networks is done on the
basis of weight and then checking of the movements is done based on the same. The result
needs to be maximized for efficiency. A positive reward is assigned in case of a correct
outcome and a negative reward is assigned in case of a wrong outcome obtained from the
image gyroscope and the network is then re – trained. This way, the robot’s leg is capable to
teaching itself in a very small time.
The movements can be controlled by the help of an Artificial Neural Network , ANN for
helping the robot. The reinforcement learning using the ANN as well as motor babbling are
combined, random movements are attempted by the system. The system learns the properties
by using a movement’s results obtained using the image gyroscope. A reward is given when a
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
good performance is achieved. A General to Particular (G2P) algorithm is used. In the
General – to – Particular algorithm ( G2P Algorithm ), there are 3 stages in the learning
method. They are : a) Motor Babbling, b) exploration and c) Exploitation. In the motor
babbling stage, a sequence of random movements is performed by the limb for approximately
5 minutes to get to know the capacity of the body. A change in the current of the DC motor
which is attached to the limb makes this possible by changing the angle, velocity and
acceleration values. An artificial Neural Network ( ANN ) is generated which consists of
multiple layers, using this algorithm. The angle values are considered as inputs and current
values in the motor are considered as output. The generation and the training of an ANN can
be done using MATLAB and the Deep Learning Toolbox. The ANN makes use of the result
of motor babbling. In the start stage, an initial mapping is done from motor babbling. In next
stage, the desired task dynamics are generated and the model is updated. Finally, each
element transforms into a radius of a cyclical trajectory. The limit cycle transforms into the
required dynamics for every joint.
The controlling joints are controlled using the MS – DOS on the main computer which uses
the various interface cards. The language used is turbo C language. The distributed control
system is used. Some peripherals used are wireless LAN and CAN module, vision system etc.
The Controller has been selected keeping in mind the fast speed needed, lesser power
consumption, small size and many peripheral interfaces. The frequency of working is 500
MHz and power consumed is 19 W.
The program designed for the Artificial Intelligence working movable range for the lower
body parts are mentioned here: For the hip, the joints are – Roll (- 90 degree to + 38 degree),
pitch (- 90 degree to + 90 degree), yaw (- 77 degree to + 60 degree). For the knee, the joints
are – Pitch (0 degree to + 150 degree). For the ankle, the joints are – Roll (- 40 degree to + 23
degree) and pitch (- 90 degree to + 90 degree). This helps to keep the program’s movements
under control.
The sub – controllers used are of 2 types – JMC (Joint Motor Controller) and Inertia Sensor.
The software used is Real Time Extension (RTX) software. It is a Hardware Abstraction
layer (HAL) software. It helps to directly access the hardware.
General – to – Particular algorithm ( G2P Algorithm ), there are 3 stages in the learning
method. They are : a) Motor Babbling, b) exploration and c) Exploitation. In the motor
babbling stage, a sequence of random movements is performed by the limb for approximately
5 minutes to get to know the capacity of the body. A change in the current of the DC motor
which is attached to the limb makes this possible by changing the angle, velocity and
acceleration values. An artificial Neural Network ( ANN ) is generated which consists of
multiple layers, using this algorithm. The angle values are considered as inputs and current
values in the motor are considered as output. The generation and the training of an ANN can
be done using MATLAB and the Deep Learning Toolbox. The ANN makes use of the result
of motor babbling. In the start stage, an initial mapping is done from motor babbling. In next
stage, the desired task dynamics are generated and the model is updated. Finally, each
element transforms into a radius of a cyclical trajectory. The limit cycle transforms into the
required dynamics for every joint.
The controlling joints are controlled using the MS – DOS on the main computer which uses
the various interface cards. The language used is turbo C language. The distributed control
system is used. Some peripherals used are wireless LAN and CAN module, vision system etc.
The Controller has been selected keeping in mind the fast speed needed, lesser power
consumption, small size and many peripheral interfaces. The frequency of working is 500
MHz and power consumed is 19 W.
The program designed for the Artificial Intelligence working movable range for the lower
body parts are mentioned here: For the hip, the joints are – Roll (- 90 degree to + 38 degree),
pitch (- 90 degree to + 90 degree), yaw (- 77 degree to + 60 degree). For the knee, the joints
are – Pitch (0 degree to + 150 degree). For the ankle, the joints are – Roll (- 40 degree to + 23
degree) and pitch (- 90 degree to + 90 degree). This helps to keep the program’s movements
under control.
The sub – controllers used are of 2 types – JMC (Joint Motor Controller) and Inertia Sensor.
The software used is Real Time Extension (RTX) software. It is a Hardware Abstraction
layer (HAL) software. It helps to directly access the hardware.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
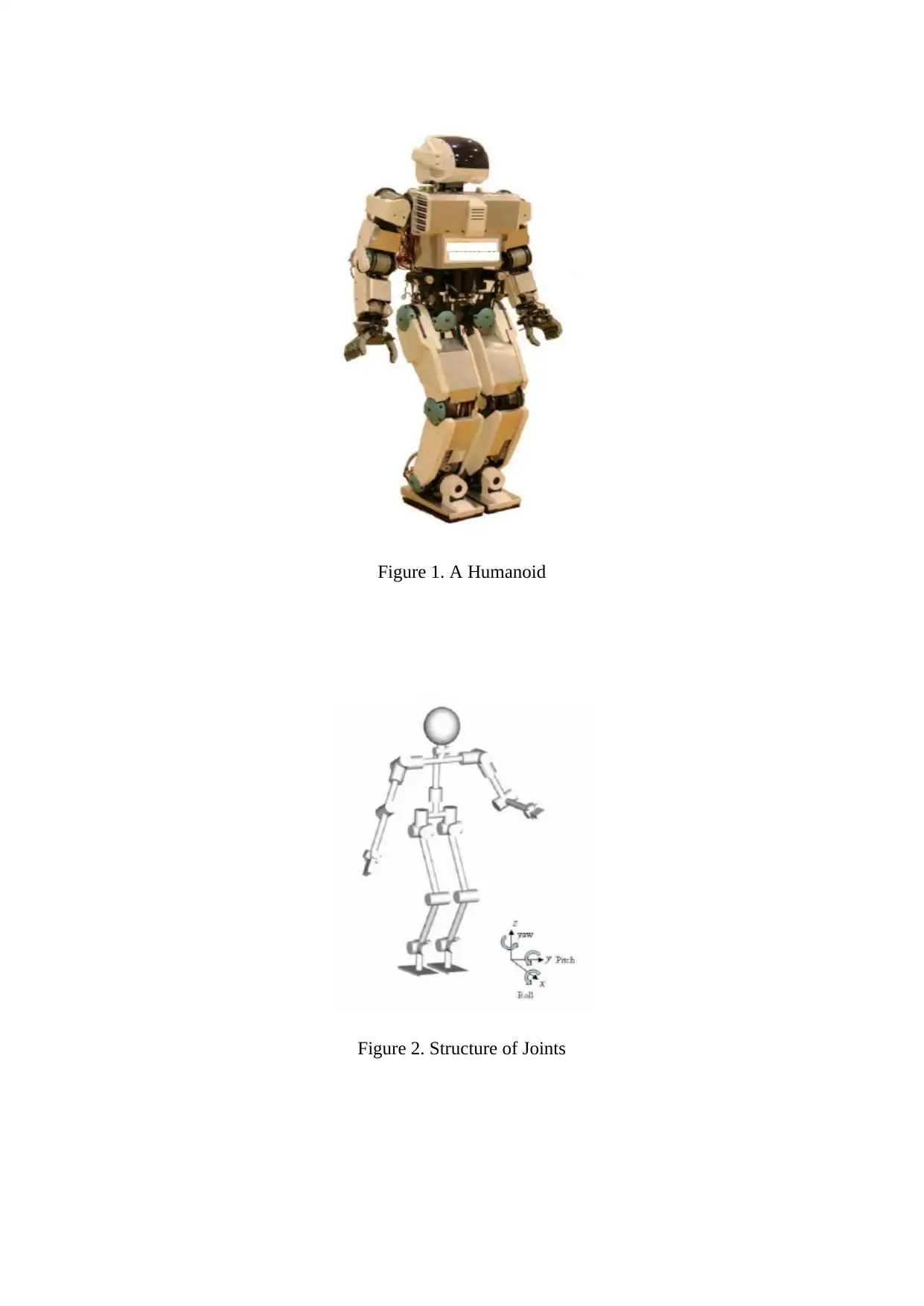
Figure 1. A Humanoid
Figure 2. Structure of Joints
Figure 2. Structure of Joints
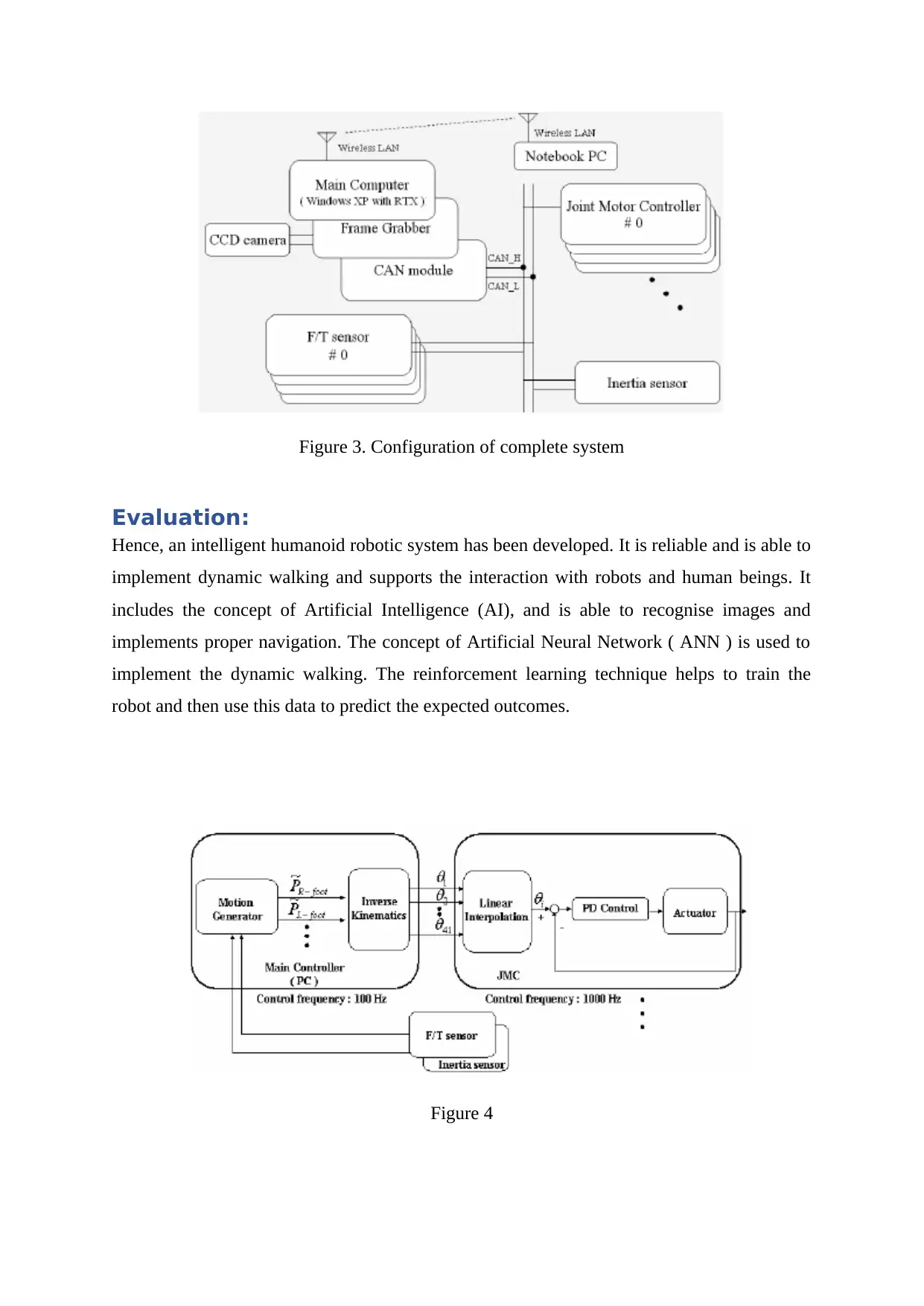
Figure 3. Configuration of complete system
Evaluation:
Hence, an intelligent humanoid robotic system has been developed. It is reliable and is able to
implement dynamic walking and supports the interaction with robots and human beings. It
includes the concept of Artificial Intelligence (AI), and is able to recognise images and
implements proper navigation. The concept of Artificial Neural Network ( ANN ) is used to
implement the dynamic walking. The reinforcement learning technique helps to train the
robot and then use this data to predict the expected outcomes.
Figure 4
Evaluation:
Hence, an intelligent humanoid robotic system has been developed. It is reliable and is able to
implement dynamic walking and supports the interaction with robots and human beings. It
includes the concept of Artificial Intelligence (AI), and is able to recognise images and
implements proper navigation. The concept of Artificial Neural Network ( ANN ) is used to
implement the dynamic walking. The reinforcement learning technique helps to train the
robot and then use this data to predict the expected outcomes.
Figure 4
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
The control of motion can be seen in Figure 4. For controlling the motion of the system,
every joint motor controller (out of 14), controls the DC motors by the help of encoder
feedback. The data of the reference position is sent by the main computer to the controller in
10 ms time.
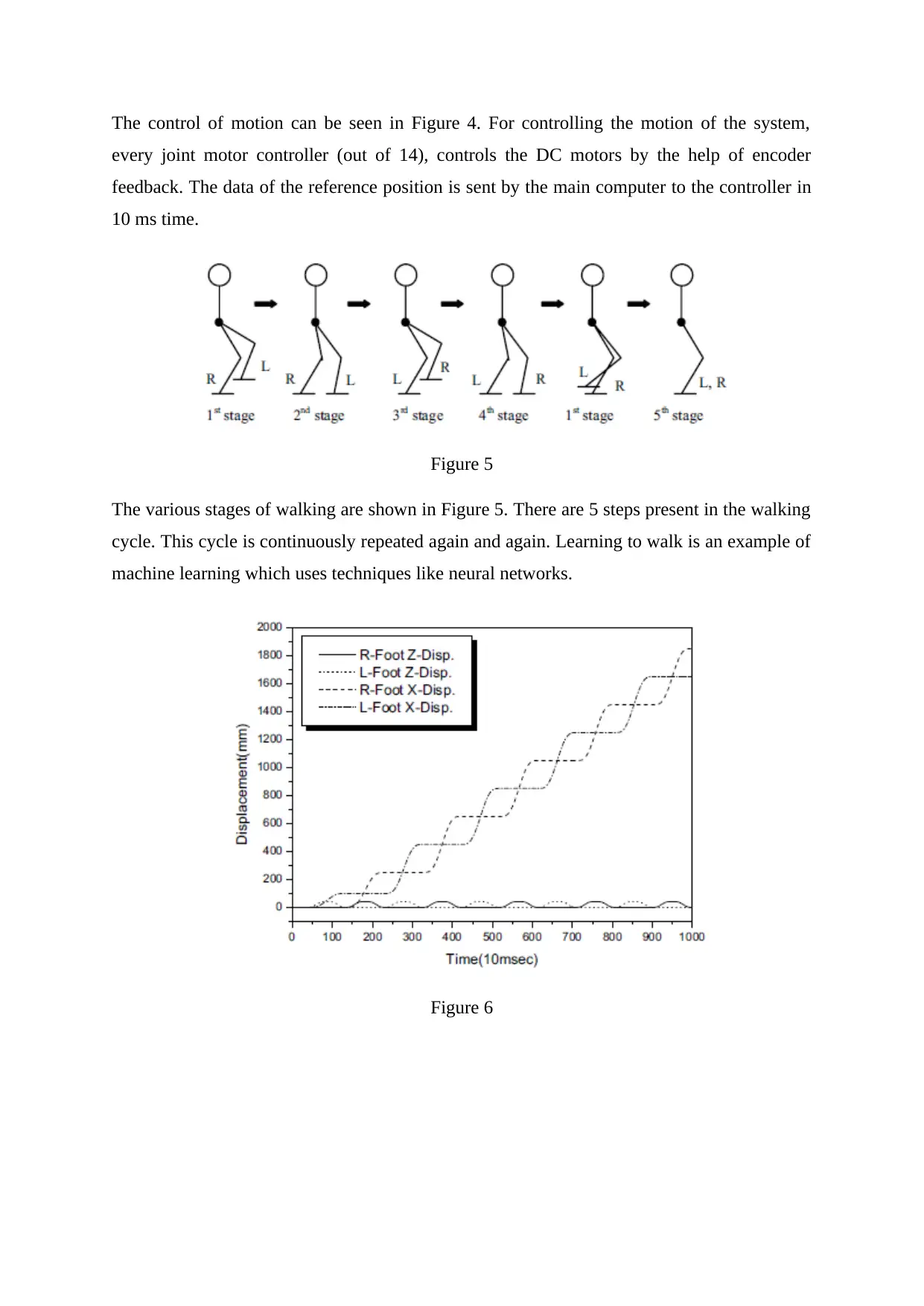
Figure 5
The various stages of walking are shown in Figure 5. There are 5 steps present in the walking
cycle. This cycle is continuously repeated again and again. Learning to walk is an example of
machine learning which uses techniques like neural networks.
Figure 6
every joint motor controller (out of 14), controls the DC motors by the help of encoder
feedback. The data of the reference position is sent by the main computer to the controller in
10 ms time.
Figure 5
The various stages of walking are shown in Figure 5. There are 5 steps present in the walking
cycle. This cycle is continuously repeated again and again. Learning to walk is an example of
machine learning which uses techniques like neural networks.
Figure 6
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
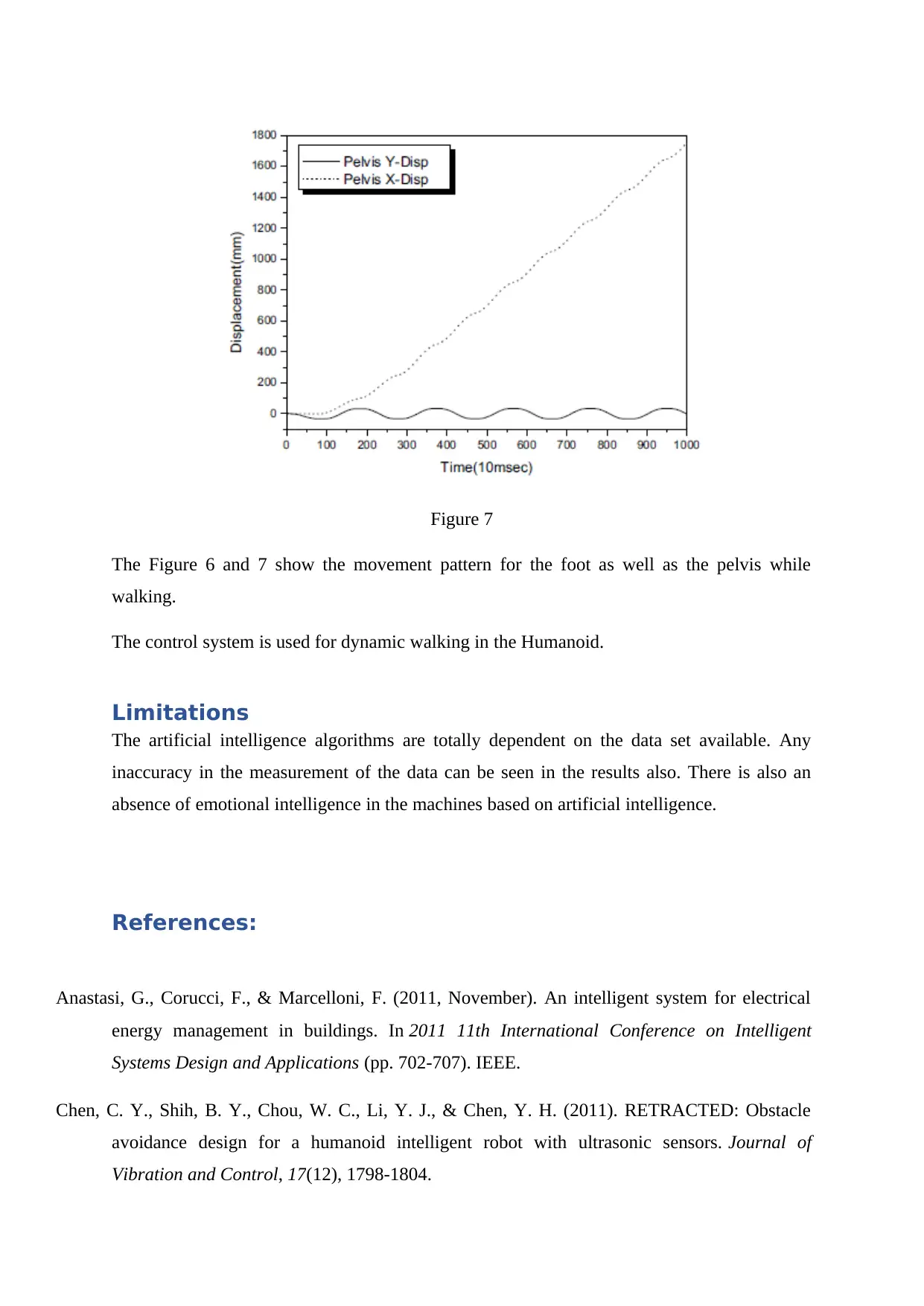
Figure 7
The Figure 6 and 7 show the movement pattern for the foot as well as the pelvis while
walking.
The control system is used for dynamic walking in the Humanoid.
Limitations
The artificial intelligence algorithms are totally dependent on the data set available. Any
inaccuracy in the measurement of the data can be seen in the results also. There is also an
absence of emotional intelligence in the machines based on artificial intelligence.
References:
Anastasi, G., Corucci, F., & Marcelloni, F. (2011, November). An intelligent system for electrical
energy management in buildings. In 2011 11th International Conference on Intelligent
Systems Design and Applications (pp. 702-707). IEEE.
Chen, C. Y., Shih, B. Y., Chou, W. C., Li, Y. J., & Chen, Y. H. (2011). RETRACTED: Obstacle
avoidance design for a humanoid intelligent robot with ultrasonic sensors. Journal of
Vibration and Control, 17(12), 1798-1804.
The Figure 6 and 7 show the movement pattern for the foot as well as the pelvis while
walking.
The control system is used for dynamic walking in the Humanoid.
Limitations
The artificial intelligence algorithms are totally dependent on the data set available. Any
inaccuracy in the measurement of the data can be seen in the results also. There is also an
absence of emotional intelligence in the machines based on artificial intelligence.
References:
Anastasi, G., Corucci, F., & Marcelloni, F. (2011, November). An intelligent system for electrical
energy management in buildings. In 2011 11th International Conference on Intelligent
Systems Design and Applications (pp. 702-707). IEEE.
Chen, C. Y., Shih, B. Y., Chou, W. C., Li, Y. J., & Chen, Y. H. (2011). RETRACTED: Obstacle
avoidance design for a humanoid intelligent robot with ultrasonic sensors. Journal of
Vibration and Control, 17(12), 1798-1804.
Chen, C. Y., Shih, B. Y., Shih, C. H., & Chou, W. C. (2012). RETRACTED: The development of
autonomous low-cost biped mobile surveillance robot by intelligent bricks. Journal of
Vibration and Control, 18(5), 577-586.
Clerc, V. (2014). U.S. Patent Application No. 29/470,290.
De-An, Z., Jidong, L., Wei, J., Ying, Z., & Yu, C. (2011). Design and control of an apple harvesting
robot. Biosystems engineering, 110(2), 112-122.
Gretzel, U. (2011). Intelligent systems in tourism: A social science perspective. Annals of tourism
research, 38(3), 757-779.
Kaljun, J., & Dolšak, B. (2012). Ergonomic design knowledge built in the intelligent decision
support system. International Journal of Industrial Ergonomics, 42(1), 162-171.
Khooban, M. H. (2014). Design an intelligent proportional-derivative (PD) feedback linearization
control for nonholonomic-wheeled mobile robot. Journal of Intelligent & Fuzzy
Systems, 26(4), 1833-1843.
Kitano, Y., Kobayashi, S., Sakakibara, M., Kawano, H., Sakai, T., Uematsu, H., ... & Murai, R.
(2012). U.S. Patent Application No. 29/413,899.
Li, B., Zhou, A., Yang, C., & Zheng, S. (2016, September). The Design and Realization of Fruit
Harvesting Robot Based on IOT. In 2016 International Conference on Computer
Engineering, Information Science & Application Technology (ICCIA 2016). Atlantis Press.
Li, M., Gu, S., Chen, G., & Zhu, Z. (2011, October). A RFID-based intelligent warehouse
management system design and implementation. In 2011 IEEE 8th International Conference
on e-Business Engineering (pp. 178-184). IEEE.
Lin, C. M., & Li, H. Y. (2013). Intelligent hybrid control system design for antilock braking systems
using self-organizing function-link fuzzy cerebellar model articulation controller. IEEE
Transactions on Fuzzy Systems, 21(6), 1044-1055.
McDuff, D., Karlson, A., Kapoor, A., Roseway, A., & Czerwinski, M. (2012, May). Affect Aura: an
intelligent system for emotional memory. In Proceedings of the SIGCHI Conference on
Human Factors in Computing Systems (pp. 849-858). ACM.
autonomous low-cost biped mobile surveillance robot by intelligent bricks. Journal of
Vibration and Control, 18(5), 577-586.
Clerc, V. (2014). U.S. Patent Application No. 29/470,290.
De-An, Z., Jidong, L., Wei, J., Ying, Z., & Yu, C. (2011). Design and control of an apple harvesting
robot. Biosystems engineering, 110(2), 112-122.
Gretzel, U. (2011). Intelligent systems in tourism: A social science perspective. Annals of tourism
research, 38(3), 757-779.
Kaljun, J., & Dolšak, B. (2012). Ergonomic design knowledge built in the intelligent decision
support system. International Journal of Industrial Ergonomics, 42(1), 162-171.
Khooban, M. H. (2014). Design an intelligent proportional-derivative (PD) feedback linearization
control for nonholonomic-wheeled mobile robot. Journal of Intelligent & Fuzzy
Systems, 26(4), 1833-1843.
Kitano, Y., Kobayashi, S., Sakakibara, M., Kawano, H., Sakai, T., Uematsu, H., ... & Murai, R.
(2012). U.S. Patent Application No. 29/413,899.
Li, B., Zhou, A., Yang, C., & Zheng, S. (2016, September). The Design and Realization of Fruit
Harvesting Robot Based on IOT. In 2016 International Conference on Computer
Engineering, Information Science & Application Technology (ICCIA 2016). Atlantis Press.
Li, M., Gu, S., Chen, G., & Zhu, Z. (2011, October). A RFID-based intelligent warehouse
management system design and implementation. In 2011 IEEE 8th International Conference
on e-Business Engineering (pp. 178-184). IEEE.
Lin, C. M., & Li, H. Y. (2013). Intelligent hybrid control system design for antilock braking systems
using self-organizing function-link fuzzy cerebellar model articulation controller. IEEE
Transactions on Fuzzy Systems, 21(6), 1044-1055.
McDuff, D., Karlson, A., Kapoor, A., Roseway, A., & Czerwinski, M. (2012, May). Affect Aura: an
intelligent system for emotional memory. In Proceedings of the SIGCHI Conference on
Human Factors in Computing Systems (pp. 849-858). ACM.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Ongenae, F., Duysburgh, P., Verstraete, M., Sulmon, N., Bleumers, L., Jacobs, A., ... & De Turck, F.
(2012, May). User-driven design of a context-aware application: an ambient-intelligent nurse
call system. In 2012 6th International Conference on Pervasive Computing Technologies for
Healthcare (Pervasive Health) and Workshops (pp. 205-210). IEEE.
Scaramuzza, D., Achtelik, M. C., Doitsidis, L., Friedrich, F., Kosmatopoulos, E., Martinelli, A., ... &
Gurdan, D. (2014). Vision-controlled micro flying robots: from system design to autonomous
navigation and mapping in GPS-denied environments. IEEE Robotics & Automation
Magazine, 21(3), 26-40.
Sen, S., Chakrabarty, S., Toshniwal, R., & Bhaumik, A. (2015). Design of an intelligent voice-
controlled home automation system. International Journal of Computer
Applications, 121(15).
Shih, B. Y., Chen, C. Y., & Chou, W. C. (2011). RETRACTED: Obstacle avoidance using a path
correction method for autonomous control of a biped intelligent robot. Journal of Vibration
and Control, 17(10), 1567-1573.
Song, S. K., & Lee, S. K. (2015). U.S. Patent Application No. 29/431,683.
Widodo, A., Shim, M. C., Caesarendra, W., & Yang, B. S. (2011). Intelligent prognostics for battery
health monitoring based on sample entropy. Expert Systems with Applications, 38(9), 11763-
11769.
Wortham, R. H., Theodorou, A., & Bryson, J. J. (2016, June). What does the robot think?
Transparency as a fundamental design requirement for intelligent systems. In Ijcai-2016
ethics for artificial intelligence workshop
(2012, May). User-driven design of a context-aware application: an ambient-intelligent nurse
call system. In 2012 6th International Conference on Pervasive Computing Technologies for
Healthcare (Pervasive Health) and Workshops (pp. 205-210). IEEE.
Scaramuzza, D., Achtelik, M. C., Doitsidis, L., Friedrich, F., Kosmatopoulos, E., Martinelli, A., ... &
Gurdan, D. (2014). Vision-controlled micro flying robots: from system design to autonomous
navigation and mapping in GPS-denied environments. IEEE Robotics & Automation
Magazine, 21(3), 26-40.
Sen, S., Chakrabarty, S., Toshniwal, R., & Bhaumik, A. (2015). Design of an intelligent voice-
controlled home automation system. International Journal of Computer
Applications, 121(15).
Shih, B. Y., Chen, C. Y., & Chou, W. C. (2011). RETRACTED: Obstacle avoidance using a path
correction method for autonomous control of a biped intelligent robot. Journal of Vibration
and Control, 17(10), 1567-1573.
Song, S. K., & Lee, S. K. (2015). U.S. Patent Application No. 29/431,683.
Widodo, A., Shim, M. C., Caesarendra, W., & Yang, B. S. (2011). Intelligent prognostics for battery
health monitoring based on sample entropy. Expert Systems with Applications, 38(9), 11763-
11769.
Wortham, R. H., Theodorou, A., & Bryson, J. J. (2016, June). What does the robot think?
Transparency as a fundamental design requirement for intelligent systems. In Ijcai-2016
ethics for artificial intelligence workshop
1 out of 10


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.