NHE2486 Electrical Power & Drive Systems: Induction Machine Report
VerifiedAdded on 2021/04/17
|25
|2031
|44
Report
AI Summary
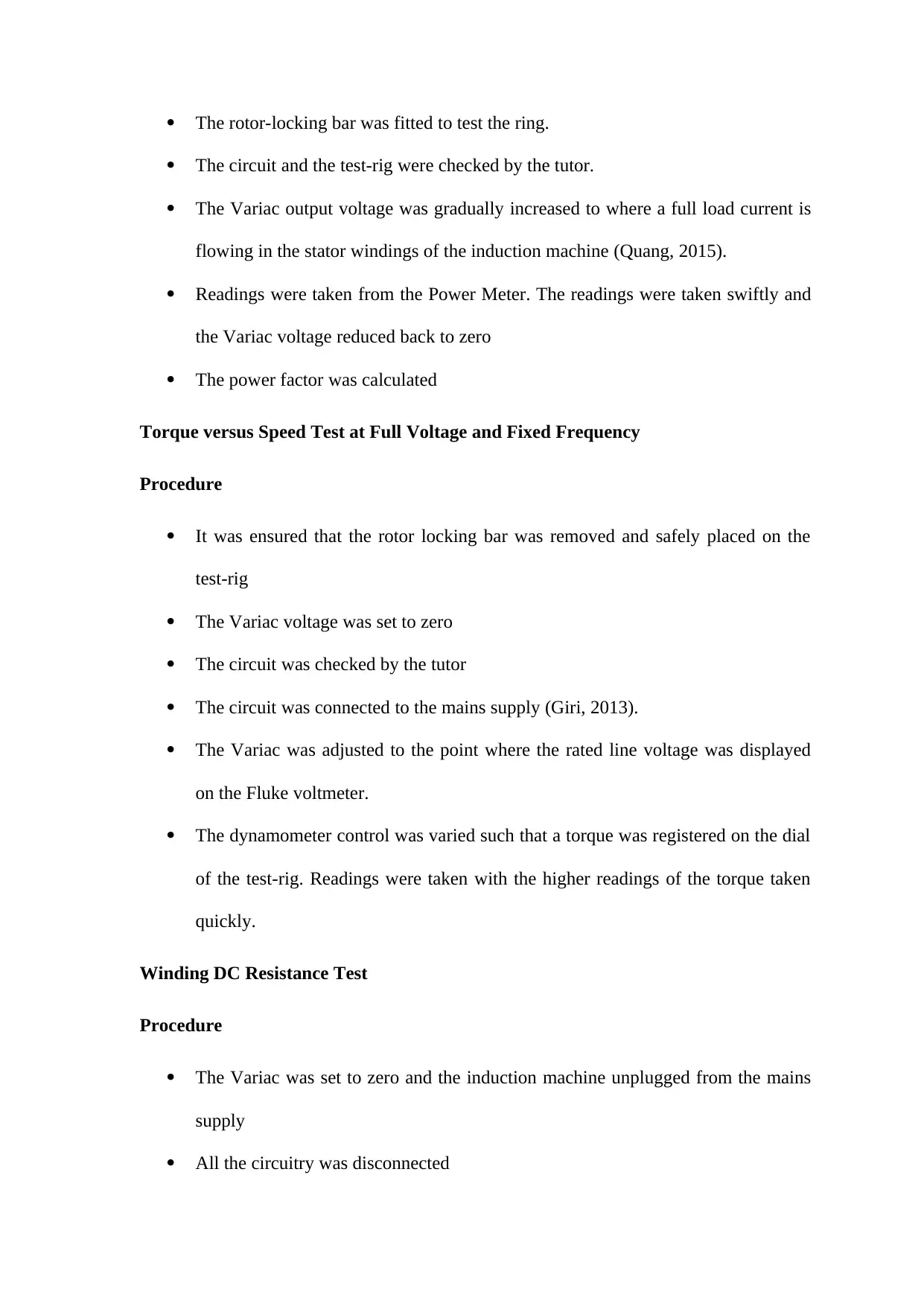
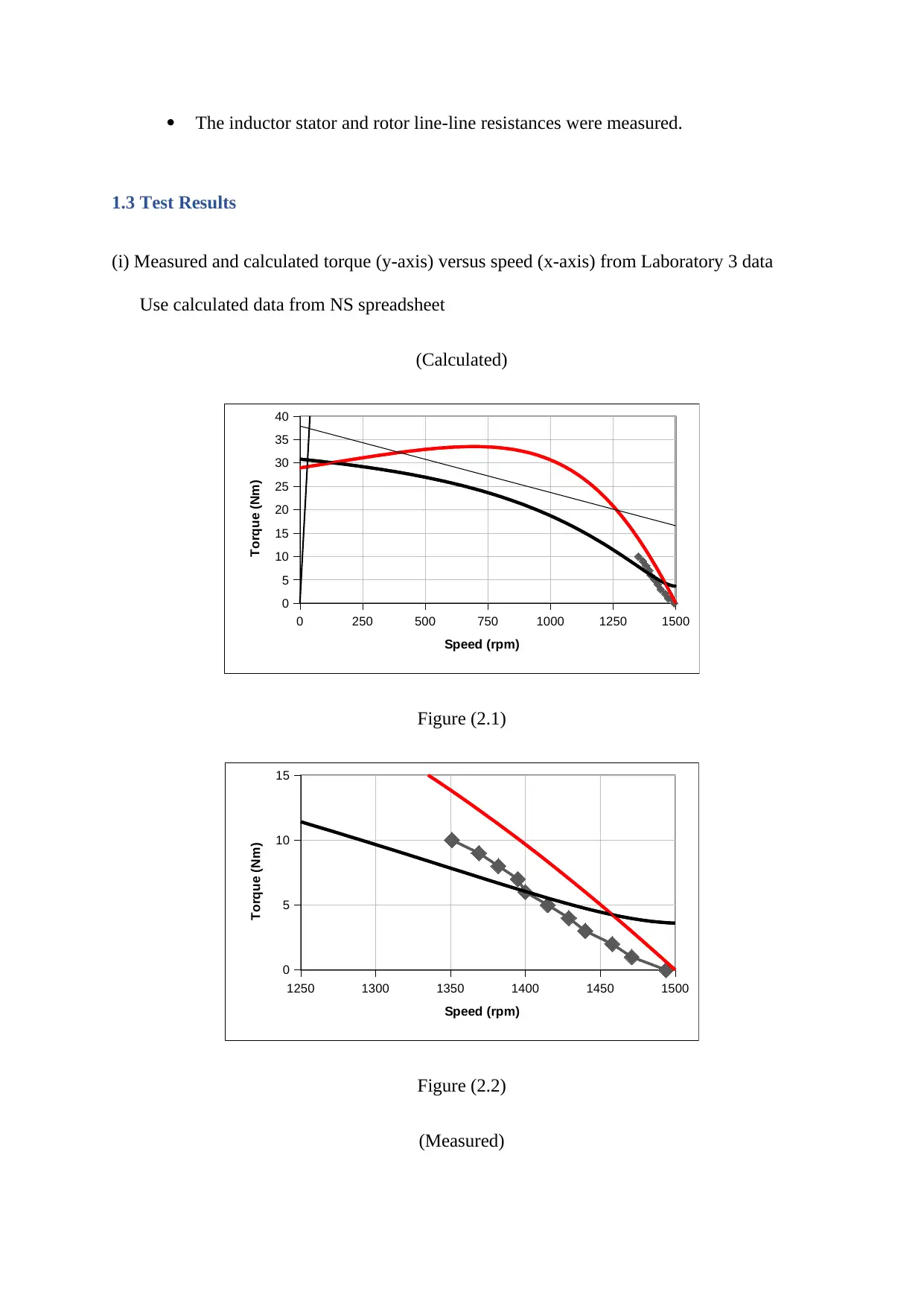
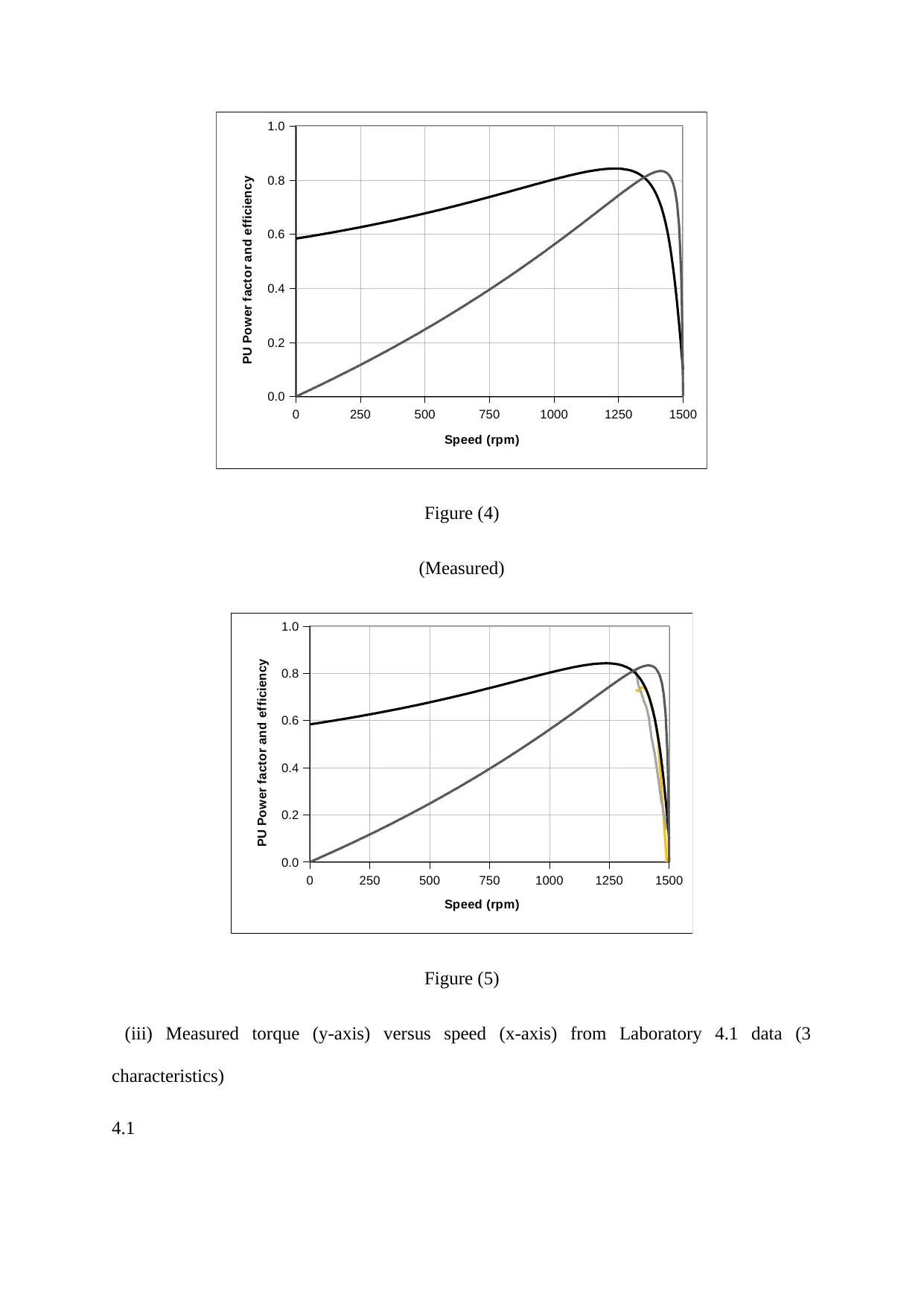
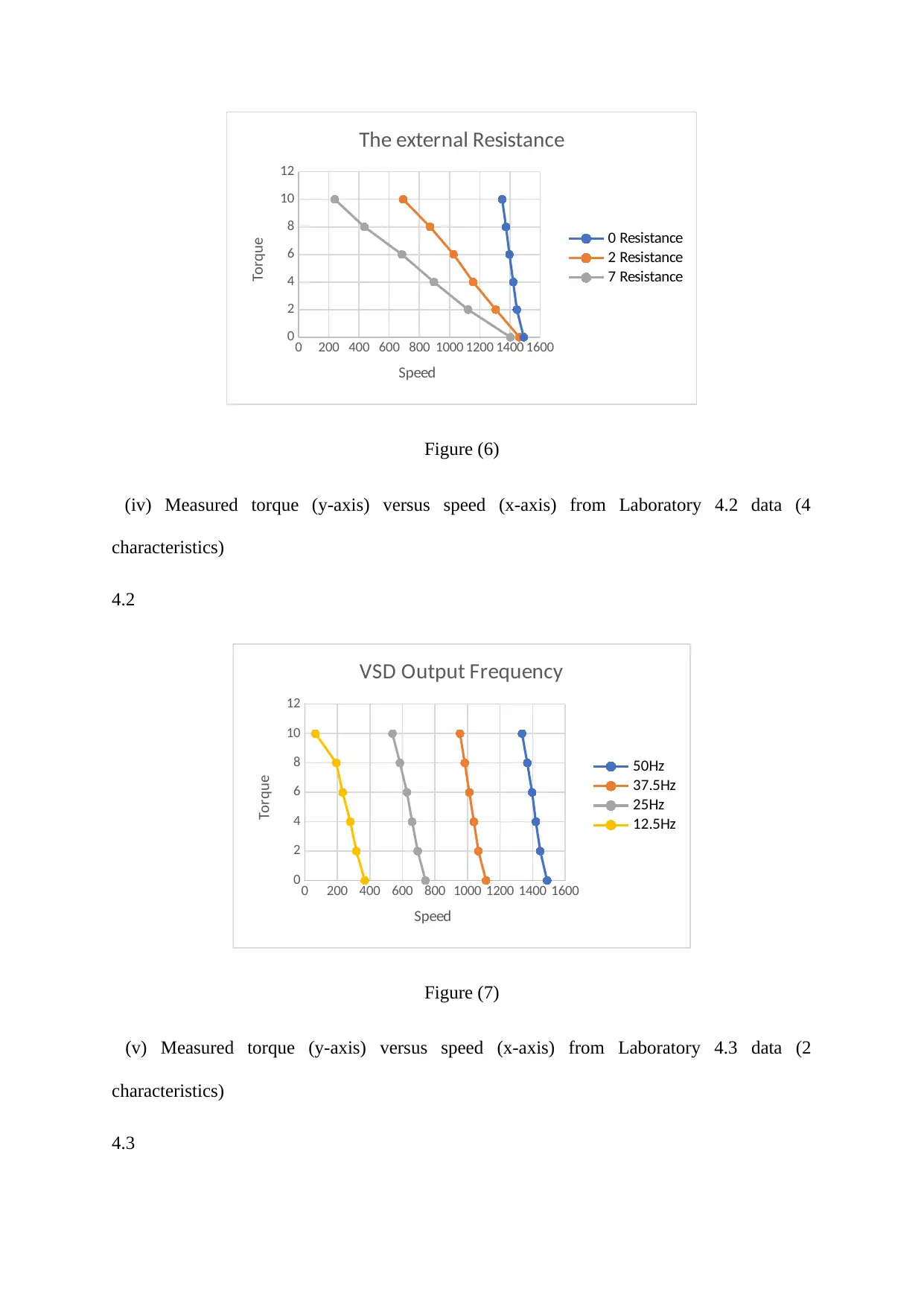
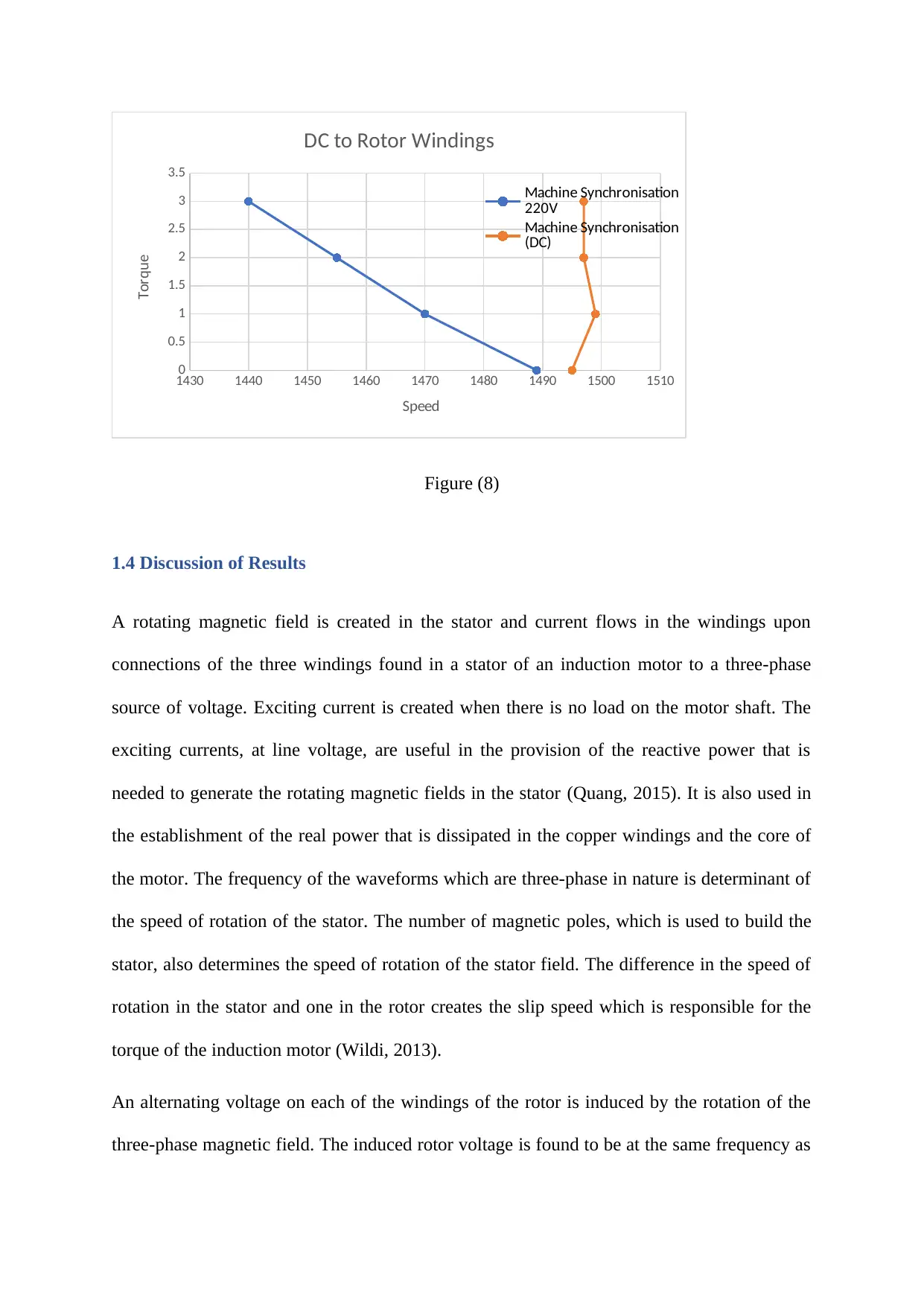
This report details the findings of laboratory experiments 3 and 4, conducted as part of the NHE2486 Electrical Power & Drive Systems course. The report investigates the characteristics of three-phase induction machines, focusing on parameter identification for the equivalent circuit and operational performance analysis. Laboratory 3 experiments included three-phase induction machine characterization, load tests, and torque-speed characteristics at full voltage and fixed frequency. Laboratory 4 experiments explored controlling torque-speed characteristics through external resistance and stator voltage supply, as well as synchronous machine behavior through DC current to the rotor. The report includes discussions of the tests, results, and conclusions, supported by figures illustrating torque-speed curves, power factor, and efficiency. The report also covers the equivalent circuit of an induction machine, the procedures for no-load and locked rotor tests, and the impact of slip on motor performance, providing insights into the practical application and behavior of induction motors.


1 out of 25
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.