Intelligent Face Recognition in Crowded Areas Using Drones
VerifiedAdded on 2021/04/16
|17
|3686
|74
Report
AI Summary
This report investigates the application of drone technology for intelligent face recognition in crowded environments. It begins with an abstract summarizing the core focus on face detection and recognition techniques using drones, highlighting the limitations of current methods. The introduction emphasizes the role of drones as unmanned aerial vehicles (UAVs) and their importance in identifying individuals, which is crucial for various applications like surveillance and monitoring. The literature review explores key parameters such as crowd management, face recognition algorithms, sense-and-avoid technologies, different types of drones, and night vision capabilities. Crowd management techniques, including motion-based methods like background subtraction and optical flow, are discussed, along with the classification of moving objects. The report then delves into face recognition, analyzing the impact of distance and angle of depression on detection accuracy. The use of Face++ and Recognition algorithms are compared, with an emphasis on the effectiveness of 3D augmentation. The report also covers sense-and-avoid systems, highlighting the use of computer vision for situational awareness and collision avoidance. Finally, the report provides an overview of various drone types based on size and aerial platform, including multi-rotor and fixed-wing drones, and their respective capabilities and applications.

1
Intelligent Face recognition in crowded area using drones
Intelligent Face Recognition in crowded areas using drones
Name of the student
Name of the University
Authors Note:
Intelligent Face recognition in crowded area using drones
Intelligent Face Recognition in crowded areas using drones
Name of the student
Name of the University
Authors Note:
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

2
Detecting face in crowded areas using drones
Table of contents
Abstract........................................................................................................................ 3
Literature Review............................................................................................................ 3
Crowd Management......................................................................................................... 3
Face Recognition............................................................................................................. 3
Sense to avoid................................................................................................................. 3
The types of drones and abilities.......................................................................................... 3
Night Vision................................................................................................................... 3
Summary....................................................................................................................... 3
Reference List................................................................................................................. 4
Detecting face in crowded areas using drones
Table of contents
Abstract........................................................................................................................ 3
Literature Review............................................................................................................ 3
Crowd Management......................................................................................................... 3
Face Recognition............................................................................................................. 3
Sense to avoid................................................................................................................. 3
The types of drones and abilities.......................................................................................... 3
Night Vision................................................................................................................... 3
Summary....................................................................................................................... 3
Reference List................................................................................................................. 4

3
Detecting face in crowded areas using drones
Abstract
Drones are also known unmanned aerial vehicle (UAV) are nothing but aircrafts
which can easily act like autonomous pilot. Advantage or plus point of drones is that
they can easily reach certain location which is dangerous for human to reach.
Drones which have characteristics to identify people on ground is considered to be
important for variety of application like surveillance, searching of people and
remote kind of monitoring. In this paper, an evaluation has been conducted on
several factors which mainly focus on face detection and recognition techniques on
drones. At present the face recognition technique can easily recognize face on
drones with some kinds of limitation.
Detecting face in crowded areas using drones
Abstract
Drones are also known unmanned aerial vehicle (UAV) are nothing but aircrafts
which can easily act like autonomous pilot. Advantage or plus point of drones is that
they can easily reach certain location which is dangerous for human to reach.
Drones which have characteristics to identify people on ground is considered to be
important for variety of application like surveillance, searching of people and
remote kind of monitoring. In this paper, an evaluation has been conducted on
several factors which mainly focus on face detection and recognition techniques on
drones. At present the face recognition technique can easily recognize face on
drones with some kinds of limitation.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
4
Detecting face in crowded areas using drones
Introduction
Drones are also known as (UAV) unmanned aerial vehicles are nothing
aircrafts which do not have pilot on board and can be piloted remotely or
autonomously (Motlagh, Bagaa & Taleb, 2017). They have the capability to fly pre-
programmed mission without any kind of autopilot suites. Faces are considered to
be an important part of the people and drones can easily identify people through
their faces. Recognition of face is considered as one of the popular in the domain of
technology and can be easily considered to be badge of success in analysis and
understanding of image (Chamasemani & Affendey, 2013). Face recognition can be
considered to be key for drones for identification of individuals within a particular
area or crowd. Drones at first need an idea about the targets and after that proper
targets can be easily launched. Thus face recognition on drones can be considered
to be a vital technical component.
In the coming pages of the report a literature review has been conducted. In
the literature review part various parameters has been checked like crowd
management, face recognition, sense to avoid, types of drones, night vision and
summary has been discussed.
Literature Review
Crowd Management
Detection technique mainly focus on tracking features, appearance and
motions, and is used for detection of crowd. Motion methods are generally
categorized as background subtraction, spatio- tempo filtering and lastly optical
flow (Penmetsa et al., 2014). Background subtraction focus on segment which focus
moving foreground by analyzing difference of current frame in comparison to a
references. This particular technique is considered to be more effective by making
use of static or pan-tilt zoom camera. Spatio –temporal filtering technique generally
characteristics the pattern of motion of frame sequence. It is generally considered
to be more sensitive to noise and variation in various moving pattern (Porikli et al.,
2013). Optical flow based or dependent technique is however being considered to
be relative movement between observer and scene and hence it has more robust to
various kinds of simultaneous motion to both camera and targets. Optical flow is
generally considered to be one of the most popular technique or method of
analysis.
After proper detection of moving parts by UAV, one further step of
classification of human being versus nonhuman crowds is required. Moving objects
can be easily classified on the basis of shape, motion and characteristics or texture
(Teutsch & Kruger, 2015). Shaped based patterns generally makes use of pattern
recognition approach which is not robust in nature. On the other hand, motion
Detecting face in crowded areas using drones
Introduction
Drones are also known as (UAV) unmanned aerial vehicles are nothing
aircrafts which do not have pilot on board and can be piloted remotely or
autonomously (Motlagh, Bagaa & Taleb, 2017). They have the capability to fly pre-
programmed mission without any kind of autopilot suites. Faces are considered to
be an important part of the people and drones can easily identify people through
their faces. Recognition of face is considered as one of the popular in the domain of
technology and can be easily considered to be badge of success in analysis and
understanding of image (Chamasemani & Affendey, 2013). Face recognition can be
considered to be key for drones for identification of individuals within a particular
area or crowd. Drones at first need an idea about the targets and after that proper
targets can be easily launched. Thus face recognition on drones can be considered
to be a vital technical component.
In the coming pages of the report a literature review has been conducted. In
the literature review part various parameters has been checked like crowd
management, face recognition, sense to avoid, types of drones, night vision and
summary has been discussed.
Literature Review
Crowd Management
Detection technique mainly focus on tracking features, appearance and
motions, and is used for detection of crowd. Motion methods are generally
categorized as background subtraction, spatio- tempo filtering and lastly optical
flow (Penmetsa et al., 2014). Background subtraction focus on segment which focus
moving foreground by analyzing difference of current frame in comparison to a
references. This particular technique is considered to be more effective by making
use of static or pan-tilt zoom camera. Spatio –temporal filtering technique generally
characteristics the pattern of motion of frame sequence. It is generally considered
to be more sensitive to noise and variation in various moving pattern (Porikli et al.,
2013). Optical flow based or dependent technique is however being considered to
be relative movement between observer and scene and hence it has more robust to
various kinds of simultaneous motion to both camera and targets. Optical flow is
generally considered to be one of the most popular technique or method of
analysis.
After proper detection of moving parts by UAV, one further step of
classification of human being versus nonhuman crowds is required. Moving objects
can be easily classified on the basis of shape, motion and characteristics or texture
(Teutsch & Kruger, 2015). Shaped based patterns generally makes use of pattern
recognition approach which is not robust in nature. On the other hand, motion
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
5
Detecting face in crowded areas using drones
based techniques are generally depending on key assumption for target based
motion features which are unique enough to be properly recognized. There are
certain number of methods which generally depend on various kinds of predefined
methods and proper recognizing of human beings (Howard, 2013). Texture based or
depend methods can be easily overcome this kind of limitation and easily provide
improved or better detection quality along with better accuracy in various human
classification. HOG generally applies a high dimension of vector of features which is
present on the edges of the image.
It generally makes use of support vector machine (SVM) for collection and
supervision of learning models for data analysis which gain can be easily used for
classification of various objects (Zeng, Zhang & Lim, 2016). HOG or linear SVM
generally has a significant advantage which is generally present for art of system
for human detection. UGV generally have higher value of resolution which provides
upright view of the crowd. The HOG applied algorithm for human detection
generally makes use of high fidelity and it also provides proper image position of
various detected individuals.
Face Recognition
Effect of distance
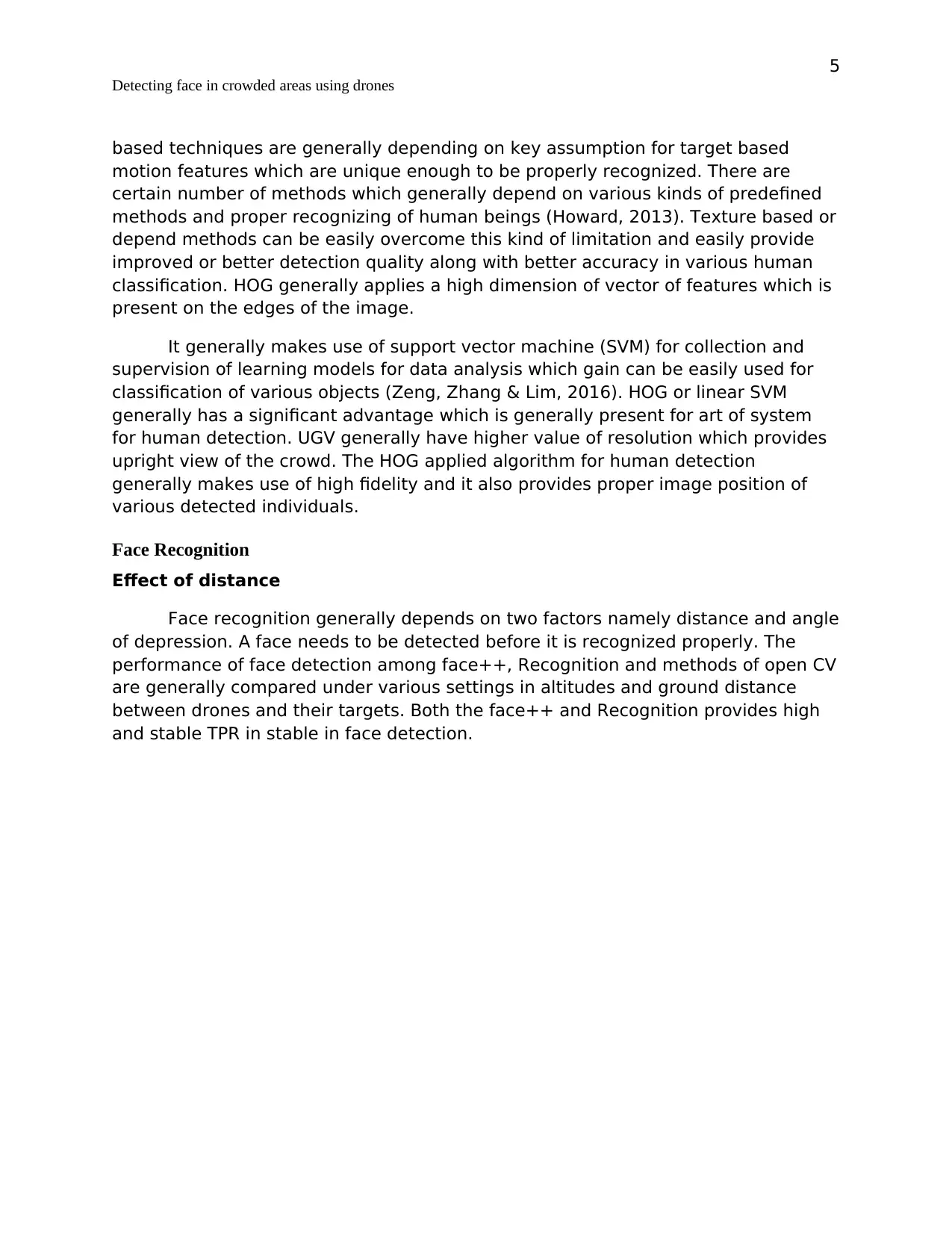
Face recognition generally depends on two factors namely distance and angle
of depression. A face needs to be detected before it is recognized properly. The
performance of face detection among face++, Recognition and methods of open CV
are generally compared under various settings in altitudes and ground distance
between drones and their targets. Both the face++ and Recognition provides high
and stable TPR in stable in face detection.
Detecting face in crowded areas using drones
based techniques are generally depending on key assumption for target based
motion features which are unique enough to be properly recognized. There are
certain number of methods which generally depend on various kinds of predefined
methods and proper recognizing of human beings (Howard, 2013). Texture based or
depend methods can be easily overcome this kind of limitation and easily provide
improved or better detection quality along with better accuracy in various human
classification. HOG generally applies a high dimension of vector of features which is
present on the edges of the image.
It generally makes use of support vector machine (SVM) for collection and
supervision of learning models for data analysis which gain can be easily used for
classification of various objects (Zeng, Zhang & Lim, 2016). HOG or linear SVM
generally has a significant advantage which is generally present for art of system
for human detection. UGV generally have higher value of resolution which provides
upright view of the crowd. The HOG applied algorithm for human detection
generally makes use of high fidelity and it also provides proper image position of
various detected individuals.
Face Recognition
Effect of distance
Face recognition generally depends on two factors namely distance and angle
of depression. A face needs to be detected before it is recognized properly. The
performance of face detection among face++, Recognition and methods of open CV
are generally compared under various settings in altitudes and ground distance
between drones and their targets. Both the face++ and Recognition provides high
and stable TPR in stable in face detection.
6
Detecting face in crowded areas using drones
Fig 1: Face++ and Recognition under various ground distance
between drones and subject
(Source: Created by Author)
Face++ and recognition provides a score between 50 to 100 for analyzing
the fact that whether a face belongs to destination person or not.
Detecting face in crowded areas using drones
Fig 1: Face++ and Recognition under various ground distance
between drones and subject
(Source: Created by Author)
Face++ and recognition provides a score between 50 to 100 for analyzing
the fact that whether a face belongs to destination person or not.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
7
Detecting face in crowded areas using drones
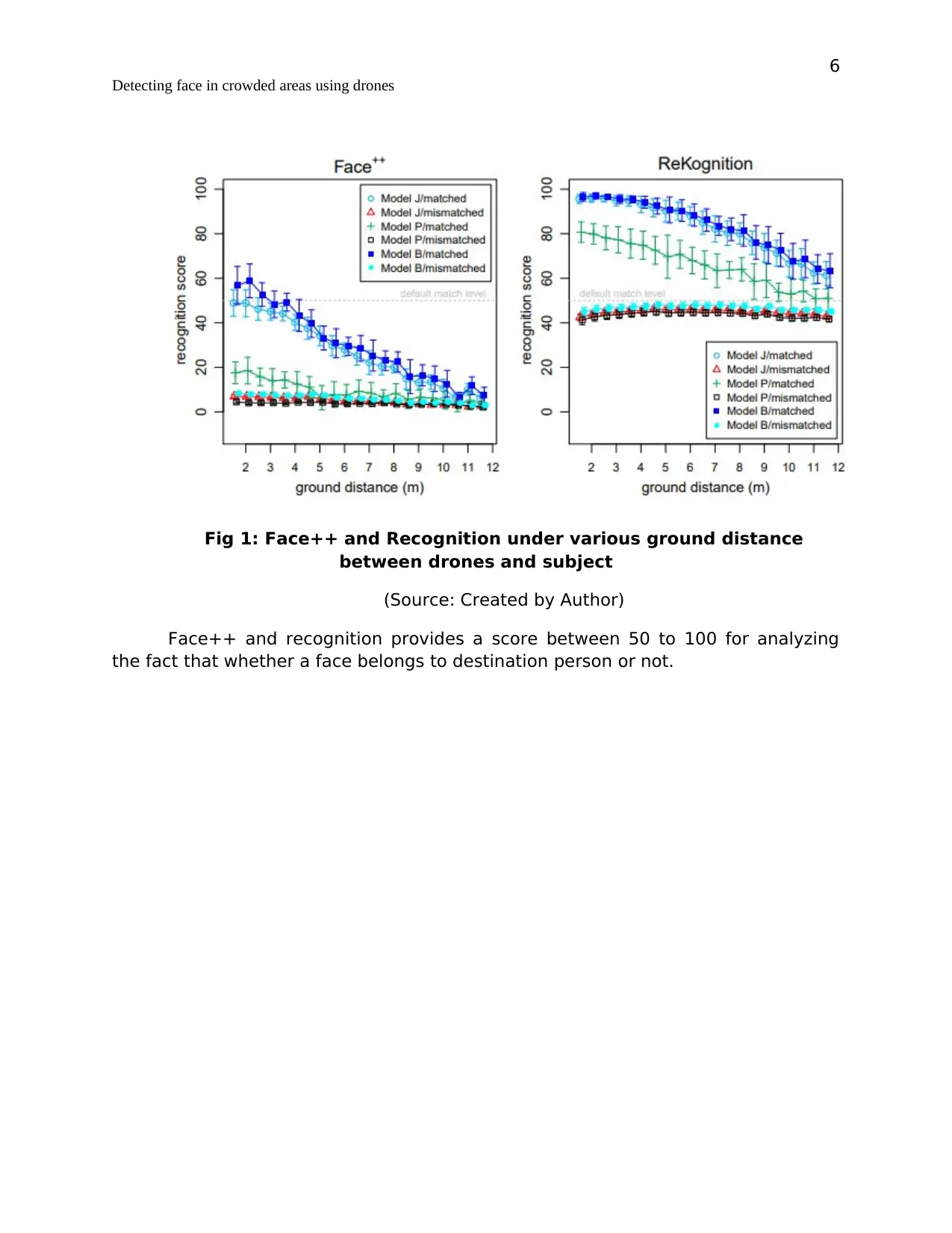
Angle of Depression
Drones generally takes pictures from the air so the altitude generates angles
of depression between drones and local targets (Garibotto, 2013). This ultimately
focus on position of faces from the collected pictures. The scores rated by Face++
and Recognition are stated to be stable when the ground distance is compared to
be within 4 hours. So the target addresses collected methods with various numbers
of height ranging from 1,5,3,4 and 5 meters in height and 2 to 4 meters in ground
distance which is used for evaluation the performance of Face++ and recognition
along with various angle of depression.
Fig 2: Scores provided by Face++ and Recognition under various angle of
depression
(Source: Created by Author).
For both the methods the score drop value of angle of depression generally
increases by a large value. Recognition provides a score of match value which is
beyond the default level of match. It also focusses on matched cases from
mismatched one (Shao & Fu, 2015). Face++ shows both matched and mismatched
cases which generally comes up with angle of depression more than 40 degrees for
all the models which are provided. So Face++ looks is able to distinguish various
faces collected with large angle of depressions.
Possible approach for this kind of augmentation is implementation or
adaptation of adaptation of 3D models techniques which can be easily used for
generation of photos which is used for additional pitch angles (Ali et al., 2016). The
face recognition model is generally trained with extra images with large pitch
angels.
Detecting face in crowded areas using drones
Angle of Depression
Drones generally takes pictures from the air so the altitude generates angles
of depression between drones and local targets (Garibotto, 2013). This ultimately
focus on position of faces from the collected pictures. The scores rated by Face++
and Recognition are stated to be stable when the ground distance is compared to
be within 4 hours. So the target addresses collected methods with various numbers
of height ranging from 1,5,3,4 and 5 meters in height and 2 to 4 meters in ground
distance which is used for evaluation the performance of Face++ and recognition
along with various angle of depression.
Fig 2: Scores provided by Face++ and Recognition under various angle of
depression
(Source: Created by Author).
For both the methods the score drop value of angle of depression generally
increases by a large value. Recognition provides a score of match value which is
beyond the default level of match. It also focusses on matched cases from
mismatched one (Shao & Fu, 2015). Face++ shows both matched and mismatched
cases which generally comes up with angle of depression more than 40 degrees for
all the models which are provided. So Face++ looks is able to distinguish various
faces collected with large angle of depressions.
Possible approach for this kind of augmentation is implementation or
adaptation of adaptation of 3D models techniques which can be easily used for
generation of photos which is used for additional pitch angles (Ali et al., 2016). The
face recognition model is generally trained with extra images with large pitch
angels.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
8
Detecting face in crowded areas using drones
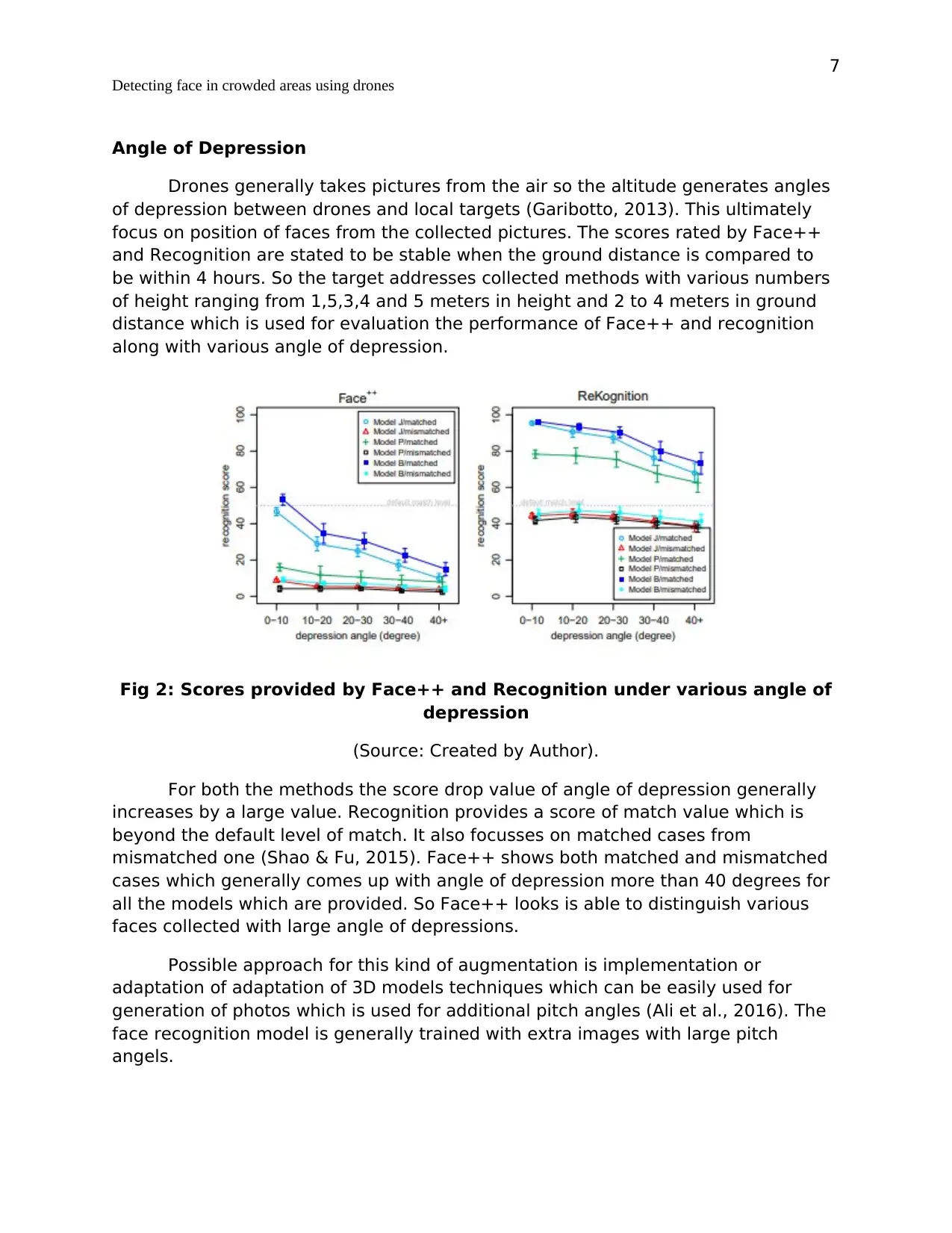
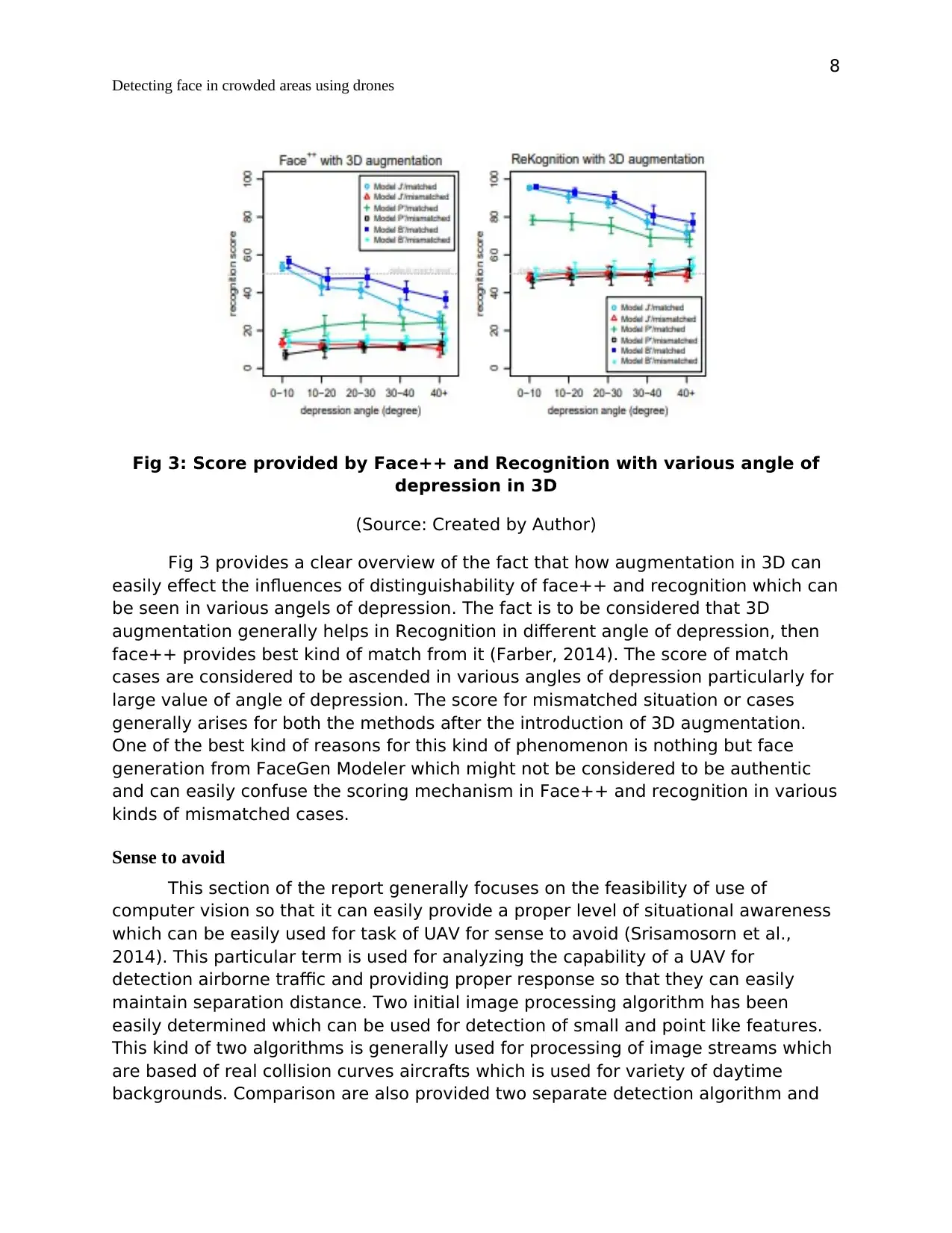
Fig 3: Score provided by Face++ and Recognition with various angle of
depression in 3D
(Source: Created by Author)
Fig 3 provides a clear overview of the fact that how augmentation in 3D can
easily effect the influences of distinguishability of face++ and recognition which can
be seen in various angels of depression. The fact is to be considered that 3D
augmentation generally helps in Recognition in different angle of depression, then
face++ provides best kind of match from it (Farber, 2014). The score of match
cases are considered to be ascended in various angles of depression particularly for
large value of angle of depression. The score for mismatched situation or cases
generally arises for both the methods after the introduction of 3D augmentation.
One of the best kind of reasons for this kind of phenomenon is nothing but face
generation from FaceGen Modeler which might not be considered to be authentic
and can easily confuse the scoring mechanism in Face++ and recognition in various
kinds of mismatched cases.
Sense to avoid
This section of the report generally focuses on the feasibility of use of
computer vision so that it can easily provide a proper level of situational awareness
which can be easily used for task of UAV for sense to avoid (Srisamosorn et al.,
2014). This particular term is used for analyzing the capability of a UAV for
detection airborne traffic and providing proper response so that they can easily
maintain separation distance. Two initial image processing algorithm has been
easily determined which can be used for detection of small and point like features.
This kind of two algorithms is generally used for processing of image streams which
are based of real collision curves aircrafts which is used for variety of daytime
backgrounds. Comparison are also provided two separate detection algorithm and
Detecting face in crowded areas using drones
Fig 3: Score provided by Face++ and Recognition with various angle of
depression in 3D
(Source: Created by Author)
Fig 3 provides a clear overview of the fact that how augmentation in 3D can
easily effect the influences of distinguishability of face++ and recognition which can
be seen in various angels of depression. The fact is to be considered that 3D
augmentation generally helps in Recognition in different angle of depression, then
face++ provides best kind of match from it (Farber, 2014). The score of match
cases are considered to be ascended in various angles of depression particularly for
large value of angle of depression. The score for mismatched situation or cases
generally arises for both the methods after the introduction of 3D augmentation.
One of the best kind of reasons for this kind of phenomenon is nothing but face
generation from FaceGen Modeler which might not be considered to be authentic
and can easily confuse the scoring mechanism in Face++ and recognition in various
kinds of mismatched cases.
Sense to avoid
This section of the report generally focuses on the feasibility of use of
computer vision so that it can easily provide a proper level of situational awareness
which can be easily used for task of UAV for sense to avoid (Srisamosorn et al.,
2014). This particular term is used for analyzing the capability of a UAV for
detection airborne traffic and providing proper response so that they can easily
maintain separation distance. Two initial image processing algorithm has been
easily determined which can be used for detection of small and point like features.
This kind of two algorithms is generally used for processing of image streams which
are based of real collision curves aircrafts which is used for variety of daytime
backgrounds. Comparison are also provided two separate detection algorithm and

9
Detecting face in crowded areas using drones
have easily provided a best way which can be used for increasing the relicense to
various image based noise. It ultimately helps in lower rate of false alarms which is
generally specific to sensitive detection threshold.
The camera which is used for series of trials is PointGrey Research Dragonfly.
It is specifically designed for industrial based machine tasks (Krishnan, 2015). A
sensor platform is generally constructed by making use of Dragonfly camera and
lens which consist of inertial measurement unit and generally used like a measuring
units. A series of image streams is recorded which focus on targeting of aircrafts
which is made to fly on direct kind of collision with a sensor platform for long period
of time. For the purpose of comparison an alerted human observer is present at site
for recording times which can be used for recording times at which aircraft can be
easily detected through human visual system. The observer is mainly engaged was
equipped with binoculars so that they can allow determination of various targets
bearing tires of having attempting to easily locate aircraft with naked eyes.
The types of drones and abilities
Types of drones depending on size
Very small drones (Nano): This kind of drones are generally small in size
and generally designed to easily fit in vary small spaces. This type of drones can be
small like insect and is generally few centimeters in size (Tiwari & Singhai, 2017).
This type of drones is generally used by spies to intelligence on people and also the
fact is considered that their inability to be detected.
Fig 4: Nano Drones
(Source: Created by Authors)
Small drones: This types of drones are small but are not so small like Nano
drones. This type of drones can be easily lifted by making of arms and can be easily
thrown into the air.
Detecting face in crowded areas using drones
have easily provided a best way which can be used for increasing the relicense to
various image based noise. It ultimately helps in lower rate of false alarms which is
generally specific to sensitive detection threshold.
The camera which is used for series of trials is PointGrey Research Dragonfly.
It is specifically designed for industrial based machine tasks (Krishnan, 2015). A
sensor platform is generally constructed by making use of Dragonfly camera and
lens which consist of inertial measurement unit and generally used like a measuring
units. A series of image streams is recorded which focus on targeting of aircrafts
which is made to fly on direct kind of collision with a sensor platform for long period
of time. For the purpose of comparison an alerted human observer is present at site
for recording times which can be used for recording times at which aircraft can be
easily detected through human visual system. The observer is mainly engaged was
equipped with binoculars so that they can allow determination of various targets
bearing tires of having attempting to easily locate aircraft with naked eyes.
The types of drones and abilities
Types of drones depending on size
Very small drones (Nano): This kind of drones are generally small in size
and generally designed to easily fit in vary small spaces. This type of drones can be
small like insect and is generally few centimeters in size (Tiwari & Singhai, 2017).
This type of drones is generally used by spies to intelligence on people and also the
fact is considered that their inability to be detected.
Fig 4: Nano Drones
(Source: Created by Authors)
Small drones: This types of drones are small but are not so small like Nano
drones. This type of drones can be easily lifted by making of arms and can be easily
thrown into the air.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
10
Detecting face in crowded areas using drones
Fig 5: Small Drones
(Source: Created by Authors)
Medium drones: Medium drones are bit larger in comparison in comparison
to small light aircrafts. They generally weight around 200 kilos and support of two
people for its lifting (Alshearya, 2017).
Large Drones: This type of drone are generally large in size and easily be
matched with the size of the aircrafts. This type of drones is generally used for high-
powered surveillance in various war zones.
Usage: All the above mentioned type of drones are generally used for
intelligence gathering and surveillance. Some of them are also used as toys.
Types of drones based on Aerial platforms
Multi Rotor: Multi rotor drones are generally stable in nature and are also
known for maintenance of stationary position in the air for long interval of time
(Alshearya, 2017). They are generally designed with various kinds of motors to help
them stay airborne and keeping them stable.
Detecting face in crowded areas using drones
Fig 5: Small Drones
(Source: Created by Authors)
Medium drones: Medium drones are bit larger in comparison in comparison
to small light aircrafts. They generally weight around 200 kilos and support of two
people for its lifting (Alshearya, 2017).
Large Drones: This type of drone are generally large in size and easily be
matched with the size of the aircrafts. This type of drones is generally used for high-
powered surveillance in various war zones.
Usage: All the above mentioned type of drones are generally used for
intelligence gathering and surveillance. Some of them are also used as toys.
Types of drones based on Aerial platforms
Multi Rotor: Multi rotor drones are generally stable in nature and are also
known for maintenance of stationary position in the air for long interval of time
(Alshearya, 2017). They are generally designed with various kinds of motors to help
them stay airborne and keeping them stable.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
11
Detecting face in crowded areas using drones
Fig 6: Multi rotor drone
(Source: Created by Author)
Fixed Wing: Fixed wing drones are generally designed so that they can
easily resemble with various airplanes and for this particular reason they cannot
easily maintain stationary position when they are in air (Alshearya, 2017).
Fig 7: Fixed Wing Drone
(Source: Created by Author)
Single Rotor: A single rotor type of drone is generally designed with a single
rotor which is generally used for flying various kinds of drones and smaller rotor
which is placed close to tail provides direction of the drones. Single type of drones is
better in comparison because of different capabilities.
Detecting face in crowded areas using drones
Fig 6: Multi rotor drone
(Source: Created by Author)
Fixed Wing: Fixed wing drones are generally designed so that they can
easily resemble with various airplanes and for this particular reason they cannot
easily maintain stationary position when they are in air (Alshearya, 2017).
Fig 7: Fixed Wing Drone
(Source: Created by Author)
Single Rotor: A single rotor type of drone is generally designed with a single
rotor which is generally used for flying various kinds of drones and smaller rotor
which is placed close to tail provides direction of the drones. Single type of drones is
better in comparison because of different capabilities.
12
Detecting face in crowded areas using drones
Fig 8: Single Rotor
(Source: Created by Author)
Usage: This type of drones is generally used for some special kind of purpose like
photography and meteorology.
Types of Drones based on Abilities
Quadcopters: The quadcopters are generally designed with four rotors
which are arranged in a square pattern (Tiwari & Singhai, 2017). It is most common
type of drone which is used for recreational purpose but in many cases it is used for
professional purpose.
Fig 9: Quadcopters
(Source: Created by Author)
GPS drones: This type of drone are considered to be smart in some ways.
This type of drones is generally linked through GPS which helps in deciding the path
of flight (Alshearya, 2017). They move from one place to another whenever they
run out of power.
Detecting face in crowded areas using drones
Fig 8: Single Rotor
(Source: Created by Author)
Usage: This type of drones is generally used for some special kind of purpose like
photography and meteorology.
Types of Drones based on Abilities
Quadcopters: The quadcopters are generally designed with four rotors
which are arranged in a square pattern (Tiwari & Singhai, 2017). It is most common
type of drone which is used for recreational purpose but in many cases it is used for
professional purpose.
Fig 9: Quadcopters
(Source: Created by Author)
GPS drones: This type of drone are considered to be smart in some ways.
This type of drones is generally linked through GPS which helps in deciding the path
of flight (Alshearya, 2017). They move from one place to another whenever they
run out of power.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 17
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.