MN691: IOT Logistics and Supply Chain Optimization - Project Design
VerifiedAdded on 2023/04/21
|45
|10002
|462
Project
AI Summary
This project report details the design and implementation of an IOT-based logistics and supply chain optimization system, focusing on automating shelf restocking using Xblock logistic solutions. The project outlines a 12-week plan, including feasibility studies, project planning, risk management, and execution phases. It describes the roles and responsibilities of team members, a work breakdown structure, and a project design diagram illustrating the system's components, such as calibration, perception, and motion planning modules. The report explores various methodologies, including calibration, rack detection, object recognition using CNN and Faster RCNN, and motion planning techniques. Additionally, it covers end-effector design, robot manipulator models, and a detailed budget analysis. The project includes a reflective journal and a PowerPoint presentation, providing a comprehensive overview of the project's development and outcomes, with references and appendices including feedback from a previous assignment.
Running head: IOT-logistic and supply chain optimization-refill shelves Page 1 of 45
IOT – Logistics and supply chain optimization-refill shelves
IOT – Logistics and supply chain optimization-refill shelves
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
IOT-logistic and supply chain optimization-refill shelves Page 2 of 45
Table of Contents
1. Table of weekly activities:...........................................................................................................3
2. Roles and responsibilities of the team members:........................................................................5
3. Work Breakdown Structure.........................................................................................................6
4. Project design along with the diagram:.......................................................................................6
5. Different Approaches or methodologies that can be used to implement this design.................11
Budget of this project.....................................................................................................................24
7. Reflective journal:.....................................................................................................................27
8. PowerPoint Presentation............................................................................................................31
Reference.......................................................................................................................................38
Appendices....................................................................................................................................43
Appendix 1: Feedback table of Assignment 1...............................................................................43
Table of Contents
1. Table of weekly activities:...........................................................................................................3
2. Roles and responsibilities of the team members:........................................................................5
3. Work Breakdown Structure.........................................................................................................6
4. Project design along with the diagram:.......................................................................................6
5. Different Approaches or methodologies that can be used to implement this design.................11
Budget of this project.....................................................................................................................24
7. Reflective journal:.....................................................................................................................27
8. PowerPoint Presentation............................................................................................................31
Reference.......................................................................................................................................38
Appendices....................................................................................................................................43
Appendix 1: Feedback table of Assignment 1...............................................................................43
IOT-logistic and supply chain optimization-refill shelves Page 3 of 45
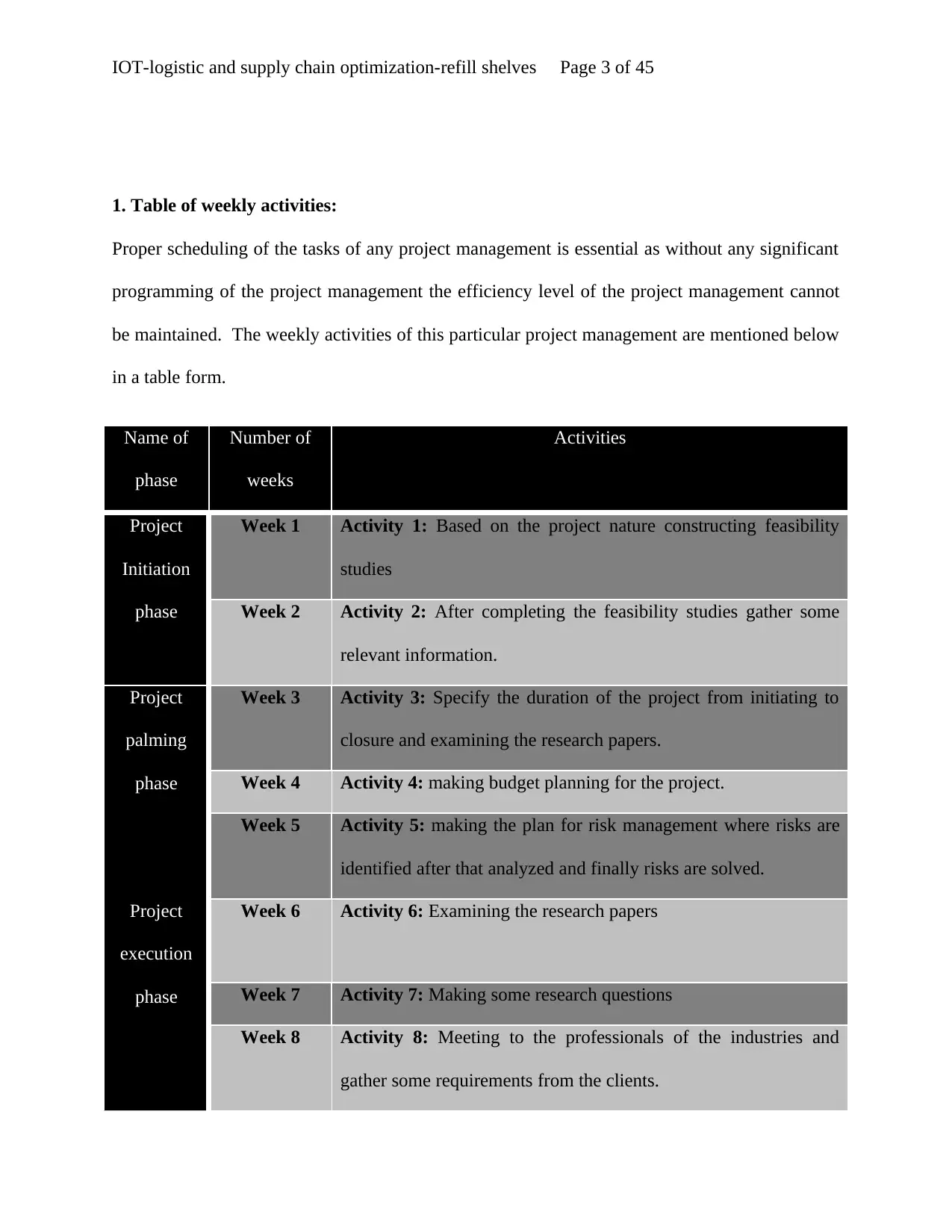
1. Table of weekly activities:
Proper scheduling of the tasks of any project management is essential as without any significant
programming of the project management the efficiency level of the project management cannot
be maintained. The weekly activities of this particular project management are mentioned below
in a table form.
Name of
phase
Number of
weeks
Activities
Project
Initiation
phase
Week 1 Activity 1: Based on the project nature constructing feasibility
studies
Week 2 Activity 2: After completing the feasibility studies gather some
relevant information.
Project
palming
phase
Week 3 Activity 3: Specify the duration of the project from initiating to
closure and examining the research papers.
Week 4 Activity 4: making budget planning for the project.
Week 5 Activity 5: making the plan for risk management where risks are
identified after that analyzed and finally risks are solved.
Project
execution
phase
Week 6 Activity 6: Examining the research papers
Week 7 Activity 7: Making some research questions
Week 8 Activity 8: Meeting to the professionals of the industries and
gather some requirements from the clients.
1. Table of weekly activities:
Proper scheduling of the tasks of any project management is essential as without any significant
programming of the project management the efficiency level of the project management cannot
be maintained. The weekly activities of this particular project management are mentioned below
in a table form.
Name of
phase
Number of
weeks
Activities
Project
Initiation
phase
Week 1 Activity 1: Based on the project nature constructing feasibility
studies
Week 2 Activity 2: After completing the feasibility studies gather some
relevant information.
Project
palming
phase
Week 3 Activity 3: Specify the duration of the project from initiating to
closure and examining the research papers.
Week 4 Activity 4: making budget planning for the project.
Week 5 Activity 5: making the plan for risk management where risks are
identified after that analyzed and finally risks are solved.
Project
execution
phase
Week 6 Activity 6: Examining the research papers
Week 7 Activity 7: Making some research questions
Week 8 Activity 8: Meeting to the professionals of the industries and
gather some requirements from the clients.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
IOT-logistic and supply chain optimization-refill shelves Page 4 of 45
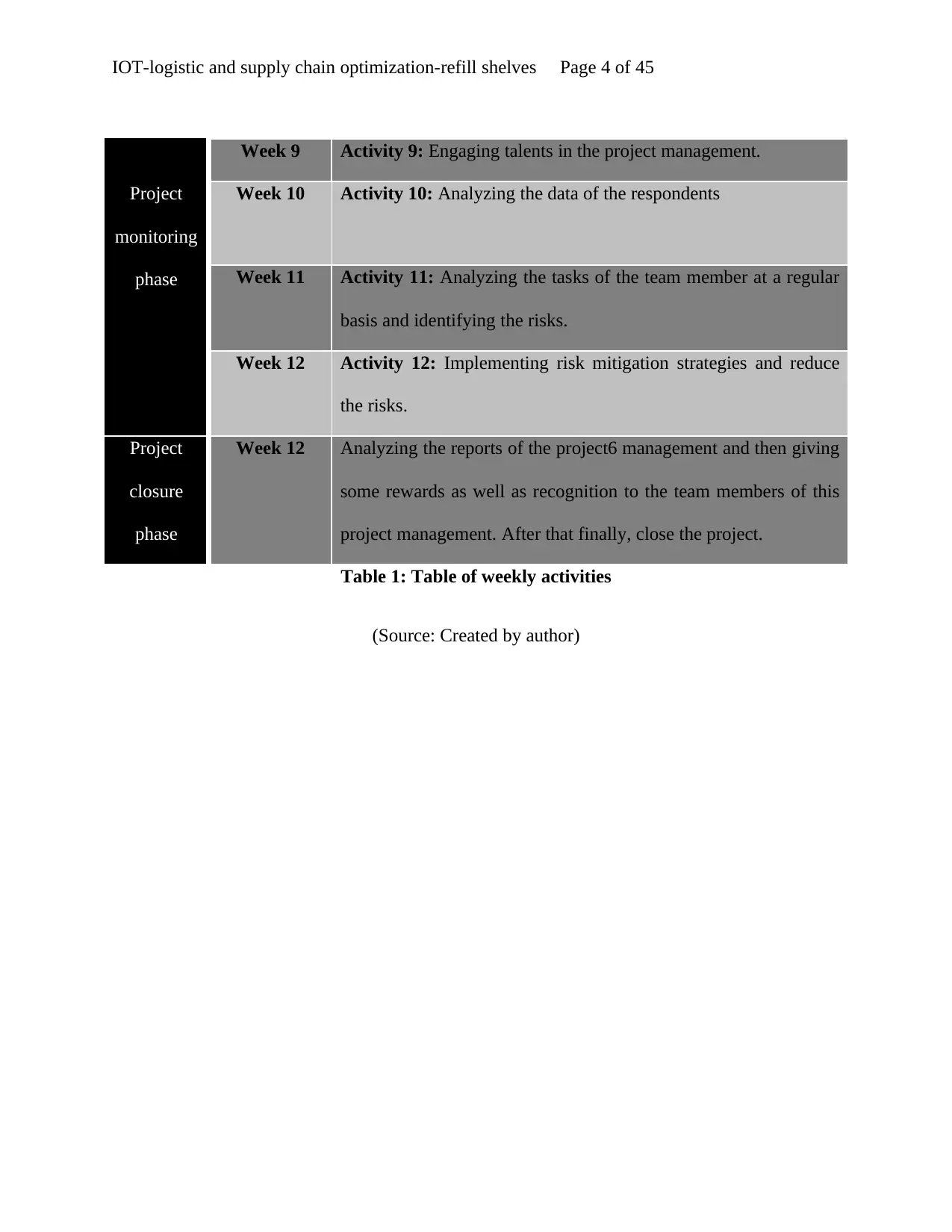
Week 9 Activity 9: Engaging talents in the project management.
Project
monitoring
phase
Week 10 Activity 10: Analyzing the data of the respondents
Week 11 Activity 11: Analyzing the tasks of the team member at a regular
basis and identifying the risks.
Week 12 Activity 12: Implementing risk mitigation strategies and reduce
the risks.
Project
closure
phase
Week 12 Analyzing the reports of the project6 management and then giving
some rewards as well as recognition to the team members of this
project management. After that finally, close the project.
Table 1: Table of weekly activities
(Source: Created by author)
Week 9 Activity 9: Engaging talents in the project management.
Project
monitoring
phase
Week 10 Activity 10: Analyzing the data of the respondents
Week 11 Activity 11: Analyzing the tasks of the team member at a regular
basis and identifying the risks.
Week 12 Activity 12: Implementing risk mitigation strategies and reduce
the risks.
Project
closure
phase
Week 12 Analyzing the reports of the project6 management and then giving
some rewards as well as recognition to the team members of this
project management. After that finally, close the project.
Table 1: Table of weekly activities
(Source: Created by author)
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
IOT-logistic and supply chain optimization-refill shelves Page 5 of 45
2. Roles and responsibilities of the team members:
In this project management of the implementation of the logistic automation, the members of the
project management team are such as analyst, project manager, project coordinator,
administrator, and training provider. It is essential that every team members can significantly
follow their roles and responsibilities so that the appropriate project management can be finished
within particular timeframe along with high quality. The characters and duties of these team
members are mentioned below.
Project manager: The overall responsibilities of the project are dependent on the project
manager. The project manager is required for project initiating, designing, palming, controlling,
executing and also project closing. Risk identification is the part of the roles of the project
manager [1].
Analyst: The main role of the project analyst is to provide proper data support to the technical
team [2]. Financial forecasting and budget tracking are also roles of the project analyst. Another
important part of the Project Analyst is to analyze the relevant data for his project.
Logistic manager: The main role of the logistics manager is to develop as well as optimize the
logistics solutions [3]. The logistics manager also manages the workers' movement towards the
implementation of the Xblock logistic solution.
Administrator: The project administrator assists the duties of the project management. The other
responsibilities of the project administrator are such as making appointments, visiting sites,
calling contractors, ordering suppliers, and also preparing the project management [4].
2. Roles and responsibilities of the team members:
In this project management of the implementation of the logistic automation, the members of the
project management team are such as analyst, project manager, project coordinator,
administrator, and training provider. It is essential that every team members can significantly
follow their roles and responsibilities so that the appropriate project management can be finished
within particular timeframe along with high quality. The characters and duties of these team
members are mentioned below.
Project manager: The overall responsibilities of the project are dependent on the project
manager. The project manager is required for project initiating, designing, palming, controlling,
executing and also project closing. Risk identification is the part of the roles of the project
manager [1].
Analyst: The main role of the project analyst is to provide proper data support to the technical
team [2]. Financial forecasting and budget tracking are also roles of the project analyst. Another
important part of the Project Analyst is to analyze the relevant data for his project.
Logistic manager: The main role of the logistics manager is to develop as well as optimize the
logistics solutions [3]. The logistics manager also manages the workers' movement towards the
implementation of the Xblock logistic solution.
Administrator: The project administrator assists the duties of the project management. The other
responsibilities of the project administrator are such as making appointments, visiting sites,
calling contractors, ordering suppliers, and also preparing the project management [4].
IOT-logistic and supply chain optimization-refill shelves Page 6 of 45
Training provider: The training providers are also relevant in this project management as by the
training provider the proper training, as well as significant knowledge regarding the
implementation of Xblock, is provided to the workforce of the project management [5].
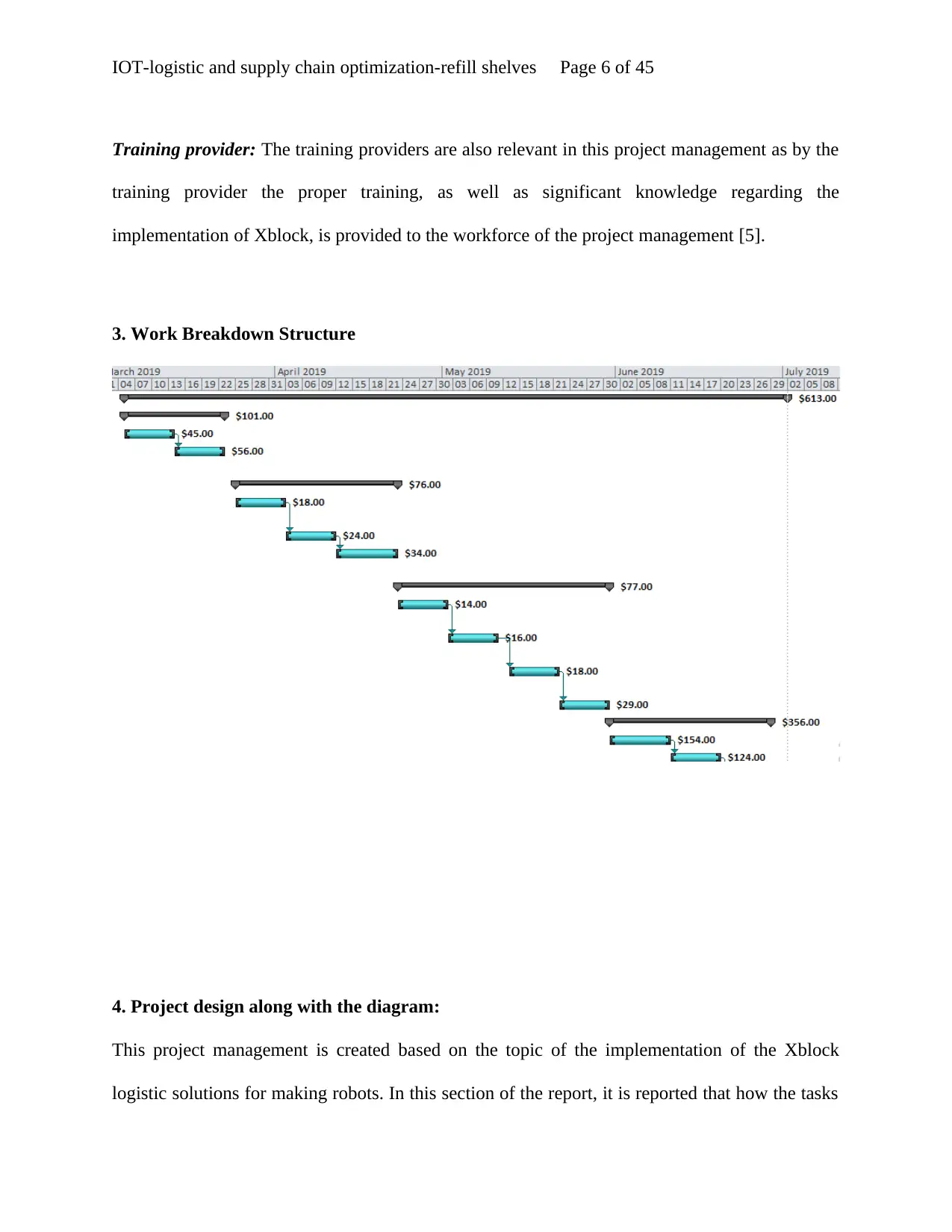
3. Work Breakdown Structure
4. Project design along with the diagram:
This project management is created based on the topic of the implementation of the Xblock
logistic solutions for making robots. In this section of the report, it is reported that how the tasks
Training provider: The training providers are also relevant in this project management as by the
training provider the proper training, as well as significant knowledge regarding the
implementation of Xblock, is provided to the workforce of the project management [5].
3. Work Breakdown Structure
4. Project design along with the diagram:
This project management is created based on the topic of the implementation of the Xblock
logistic solutions for making robots. In this section of the report, it is reported that how the tasks
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
IOT-logistic and supply chain optimization-refill shelves Page 7 of 45
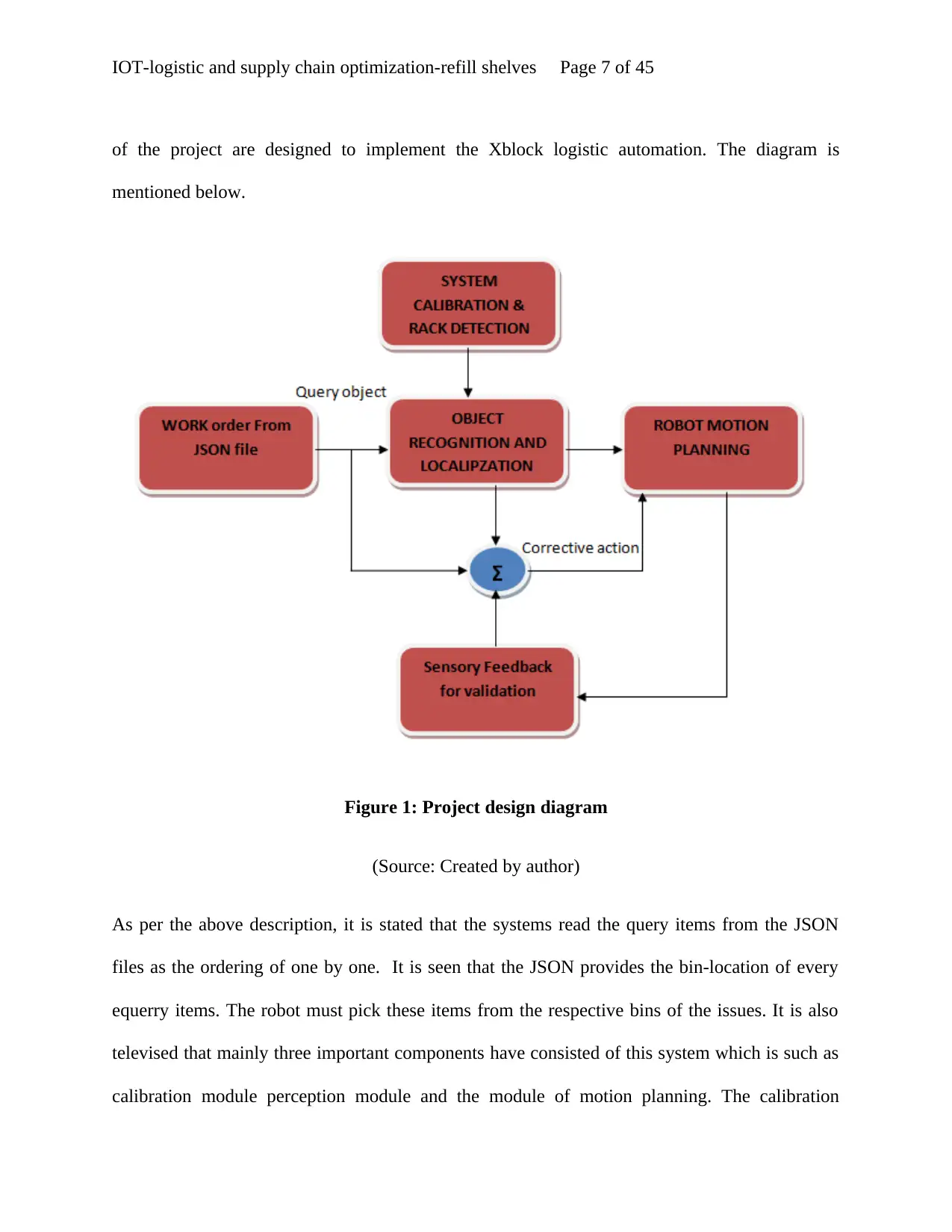
of the project are designed to implement the Xblock logistic automation. The diagram is
mentioned below.
Figure 1: Project design diagram
(Source: Created by author)
As per the above description, it is stated that the systems read the query items from the JSON
files as the ordering of one by one. It is seen that the JSON provides the bin-location of every
equerry items. The robot must pick these items from the respective bins of the issues. It is also
televised that mainly three important components have consisted of this system which is such as
calibration module perception module and the module of motion planning. The calibration
of the project are designed to implement the Xblock logistic automation. The diagram is
mentioned below.
Figure 1: Project design diagram
(Source: Created by author)
As per the above description, it is stated that the systems read the query items from the JSON
files as the ordering of one by one. It is seen that the JSON provides the bin-location of every
equerry items. The robot must pick these items from the respective bins of the issues. It is also
televised that mainly three important components have consisted of this system which is such as
calibration module perception module and the module of motion planning. The calibration
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
IOT-logistic and supply chain optimization-refill shelves Page 8 of 45
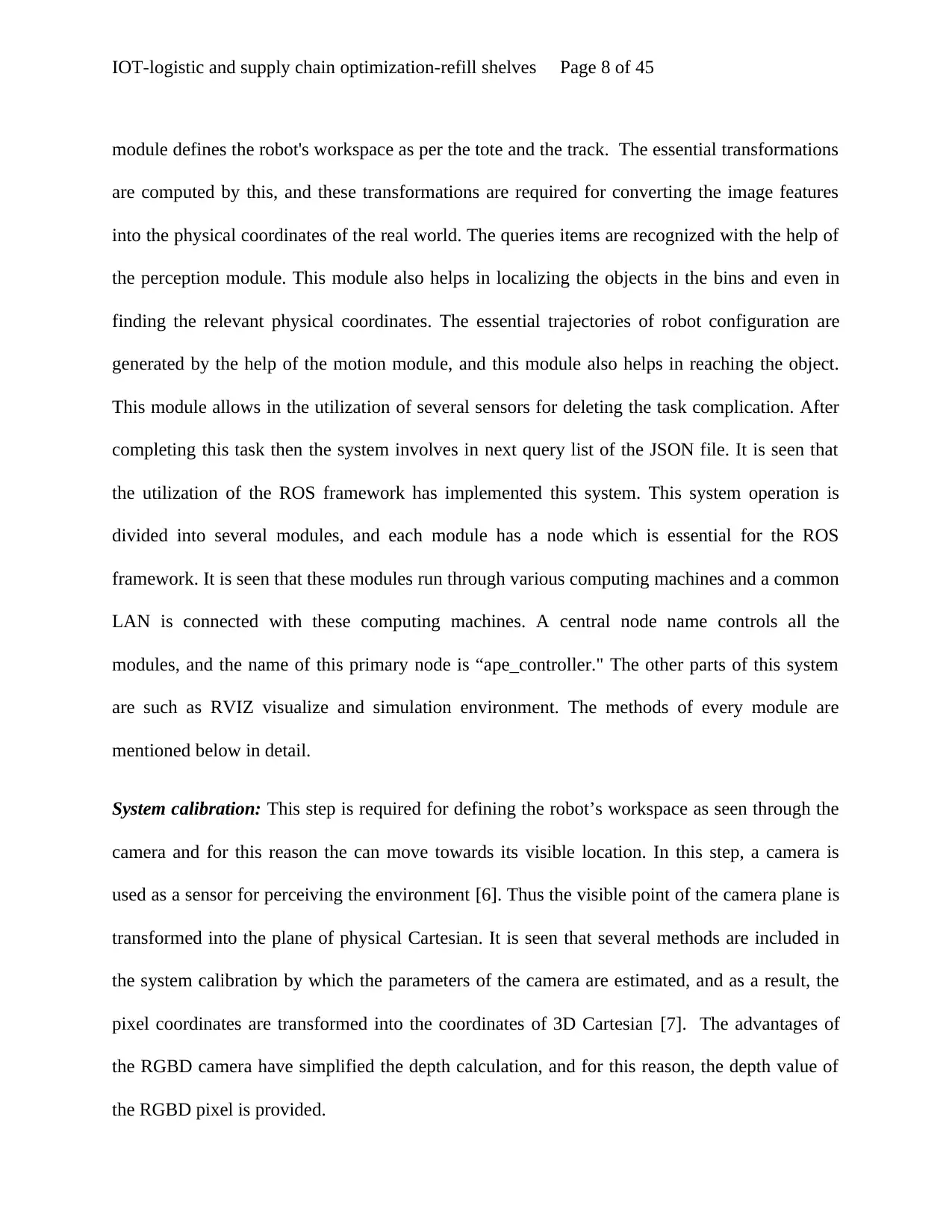
module defines the robot's workspace as per the tote and the track. The essential transformations
are computed by this, and these transformations are required for converting the image features
into the physical coordinates of the real world. The queries items are recognized with the help of
the perception module. This module also helps in localizing the objects in the bins and even in
finding the relevant physical coordinates. The essential trajectories of robot configuration are
generated by the help of the motion module, and this module also helps in reaching the object.
This module allows in the utilization of several sensors for deleting the task complication. After
completing this task then the system involves in next query list of the JSON file. It is seen that
the utilization of the ROS framework has implemented this system. This system operation is
divided into several modules, and each module has a node which is essential for the ROS
framework. It is seen that these modules run through various computing machines and a common
LAN is connected with these computing machines. A central node name controls all the
modules, and the name of this primary node is “ape_controller." The other parts of this system
are such as RVIZ visualize and simulation environment. The methods of every module are
mentioned below in detail.
System calibration: This step is required for defining the robot’s workspace as seen through the
camera and for this reason the can move towards its visible location. In this step, a camera is
used as a sensor for perceiving the environment [6]. Thus the visible point of the camera plane is
transformed into the plane of physical Cartesian. It is seen that several methods are included in
the system calibration by which the parameters of the camera are estimated, and as a result, the
pixel coordinates are transformed into the coordinates of 3D Cartesian [7]. The advantages of
the RGBD camera have simplified the depth calculation, and for this reason, the depth value of
the RGBD pixel is provided.
module defines the robot's workspace as per the tote and the track. The essential transformations
are computed by this, and these transformations are required for converting the image features
into the physical coordinates of the real world. The queries items are recognized with the help of
the perception module. This module also helps in localizing the objects in the bins and even in
finding the relevant physical coordinates. The essential trajectories of robot configuration are
generated by the help of the motion module, and this module also helps in reaching the object.
This module allows in the utilization of several sensors for deleting the task complication. After
completing this task then the system involves in next query list of the JSON file. It is seen that
the utilization of the ROS framework has implemented this system. This system operation is
divided into several modules, and each module has a node which is essential for the ROS
framework. It is seen that these modules run through various computing machines and a common
LAN is connected with these computing machines. A central node name controls all the
modules, and the name of this primary node is “ape_controller." The other parts of this system
are such as RVIZ visualize and simulation environment. The methods of every module are
mentioned below in detail.
System calibration: This step is required for defining the robot’s workspace as seen through the
camera and for this reason the can move towards its visible location. In this step, a camera is
used as a sensor for perceiving the environment [6]. Thus the visible point of the camera plane is
transformed into the plane of physical Cartesian. It is seen that several methods are included in
the system calibration by which the parameters of the camera are estimated, and as a result, the
pixel coordinates are transformed into the coordinates of 3D Cartesian [7]. The advantages of
the RGBD camera have simplified the depth calculation, and for this reason, the depth value of
the RGBD pixel is provided.
IOT-logistic and supply chain optimization-refill shelves Page 9 of 45
At first, the points set need to be considered and these points are recorded as per the frame of
Kinect which is FK. On the other side as the frame of robot base, these points are also recorded
and then it is represented as {Pi13, i = 1, 2, . . . , N}. After the robot is moved then these points are
obtained, and for this reason, these points can be touched by the robots [8]. When these two
various sets refer the same physical location's set, then the relation is created between them like
Pi13 = RPiK + t where ‘R' denotes the rotation, and ‘t’ denotes the translations, and both
translations and rotation are required for creating the transformation of the coordinate frames.
Rack detection: This step is necessary for identifying the concerns of the centers of the bin and
the track from the image of RGBD which is recorded by the Kinect camera [9]. The information
of bin centers is required for defining the ROI which is essential to identify the objects of the bin.
This bin center is also helpful for motion planning and picking purposes. The structure of the bin
centers includes the five horizontal line s and four vertical lines [10]. After intersecting of these
lines, the corners of the bin are identified. The utilization of the Hough line-transform allows the
detection of the horizontal and vertical lines of the rack. After knowing the corners, it can be
straightforward to compute the mean of the bin centers. By the utilization of OpenCV, the
horizontal lines and vertical lines are detected [11].
Object recognition: In the vision of computer the fundamental problem is the localization and
identification of the object. It is .mentioned that in the broad era of learning in depth, CNN is
utilized for recognizing the object and as a result, outstanding performance is shown [12]. A
method of the sliding window is used as the recognition technique where the classifier at every
spatial location is adequately trained. It is essential to focus on the transformation of the object
recognition into the single problem of regression [13]. The approaches improve the performance
At first, the points set need to be considered and these points are recorded as per the frame of
Kinect which is FK. On the other side as the frame of robot base, these points are also recorded
and then it is represented as {Pi13, i = 1, 2, . . . , N}. After the robot is moved then these points are
obtained, and for this reason, these points can be touched by the robots [8]. When these two
various sets refer the same physical location's set, then the relation is created between them like
Pi13 = RPiK + t where ‘R' denotes the rotation, and ‘t’ denotes the translations, and both
translations and rotation are required for creating the transformation of the coordinate frames.
Rack detection: This step is necessary for identifying the concerns of the centers of the bin and
the track from the image of RGBD which is recorded by the Kinect camera [9]. The information
of bin centers is required for defining the ROI which is essential to identify the objects of the bin.
This bin center is also helpful for motion planning and picking purposes. The structure of the bin
centers includes the five horizontal line s and four vertical lines [10]. After intersecting of these
lines, the corners of the bin are identified. The utilization of the Hough line-transform allows the
detection of the horizontal and vertical lines of the rack. After knowing the corners, it can be
straightforward to compute the mean of the bin centers. By the utilization of OpenCV, the
horizontal lines and vertical lines are detected [11].
Object recognition: In the vision of computer the fundamental problem is the localization and
identification of the object. It is .mentioned that in the broad era of learning in depth, CNN is
utilized for recognizing the object and as a result, outstanding performance is shown [12]. A
method of the sliding window is used as the recognition technique where the classifier at every
spatial location is adequately trained. It is essential to focus on the transformation of the object
recognition into the single problem of regression [13]. The approaches improve the performance
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
IOT-logistic and supply chain optimization-refill shelves Page 10 of 45
as per the computational cost. However, it is seen that the accuracy of recognition is interferer
slightly than the faster RCNN. The faster CNN is utilized as the base of object recognition and
also the task localization. As a result, the object is localized in a real-time image along with very
high accuracy of attention [14]. The other objects occlude the purpose stowing into the tote
partially or fully. It is seen that the combination of the techniques of standard-image processing
and approaches of deep learning is allowed for detection of the robust object. After that, the
target object is verified in the box of bounding by the help of RCNN. In this scenario, several
steps are followed for testing as well as preparing the dataset.
Annotation: It is seen two several types of detest have been used which are such as dataset for
stowing task and picking the task. It is understood that about 6000 of images have been
annotated.
Training models: In the task of object detection the network of VGG-16 layered calcification is
used for combining with the systems of region proposal.
Apart from these two steps, the other levels are such as object verification, the feature of color
information and shape information, and random forest.
Motion planning: The method of motion planning is classified into two categories which are
such as global methods and local methods. In the local ways, the local information is used, and
this method is started by initiating configuration and completed my final setup. On the other side
of the global process, the search is guided as the negative gradient [15]. Motion panning allows
the generations of the trajectory of robot configuration. Four steps are involved in the method of
as per the computational cost. However, it is seen that the accuracy of recognition is interferer
slightly than the faster RCNN. The faster CNN is utilized as the base of object recognition and
also the task localization. As a result, the object is localized in a real-time image along with very
high accuracy of attention [14]. The other objects occlude the purpose stowing into the tote
partially or fully. It is seen that the combination of the techniques of standard-image processing
and approaches of deep learning is allowed for detection of the robust object. After that, the
target object is verified in the box of bounding by the help of RCNN. In this scenario, several
steps are followed for testing as well as preparing the dataset.
Annotation: It is seen two several types of detest have been used which are such as dataset for
stowing task and picking the task. It is understood that about 6000 of images have been
annotated.
Training models: In the task of object detection the network of VGG-16 layered calcification is
used for combining with the systems of region proposal.
Apart from these two steps, the other levels are such as object verification, the feature of color
information and shape information, and random forest.
Motion planning: The method of motion planning is classified into two categories which are
such as global methods and local methods. In the local ways, the local information is used, and
this method is started by initiating configuration and completed my final setup. On the other side
of the global process, the search is guided as the negative gradient [15]. Motion panning allows
the generations of the trajectory of robot configuration. Four steps are involved in the method of
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
IOT-logistic and supply chain optimization-refill shelves Page 11 of 45
motion planning. It is seen that the step-1 and step-4 is executed by the utilization of the angles
which are pre-defined [16]". Step 2 is pre-grasp motion, and step-3 is post-grasp motion.
End-effectors design: In this phase, it is seen that the challenges of Amazon picking focus on
the salvation of various task stowing. The end-effectors design is critical as it helps in picking as
well as grasping multiple kinds of objects [17]. In this project, two types of end-effectors have
been designed for solving various problems such as suction-based end-effectors and combination
of gripping and suction.
Model of robot manipulator: The visual serving and other algorithms of motion planning are
de developed by the model of the robot manipulator [18].
5. Different Approaches or methodologies that can be used to implement this design
Application of CAD and Mesh model
From the above discussion, it is observed that motion planning will be considered, while
designing the robot, for the logistics and supply chain optimization. The recent literature of
robotics engineering has identified the problems regarding motion planning. It is mentioned that
generating the collision-free paths for manipulators is highly crucial and has been defined as a
complicated process as well. Hence, in this process, a CAD system can be applied to enhance the
axis sensor module of the XBlock robot. Thus, to follow a high-density mounting method, a
CAM machine will be produced. The electric circuit board will play a significant role in
developing the current product significantly [26]. The following figure highlights the prototype
of the electronic circuit board:
motion planning. It is seen that the step-1 and step-4 is executed by the utilization of the angles
which are pre-defined [16]". Step 2 is pre-grasp motion, and step-3 is post-grasp motion.
End-effectors design: In this phase, it is seen that the challenges of Amazon picking focus on
the salvation of various task stowing. The end-effectors design is critical as it helps in picking as
well as grasping multiple kinds of objects [17]. In this project, two types of end-effectors have
been designed for solving various problems such as suction-based end-effectors and combination
of gripping and suction.
Model of robot manipulator: The visual serving and other algorithms of motion planning are
de developed by the model of the robot manipulator [18].
5. Different Approaches or methodologies that can be used to implement this design
Application of CAD and Mesh model
From the above discussion, it is observed that motion planning will be considered, while
designing the robot, for the logistics and supply chain optimization. The recent literature of
robotics engineering has identified the problems regarding motion planning. It is mentioned that
generating the collision-free paths for manipulators is highly crucial and has been defined as a
complicated process as well. Hence, in this process, a CAD system can be applied to enhance the
axis sensor module of the XBlock robot. Thus, to follow a high-density mounting method, a
CAM machine will be produced. The electric circuit board will play a significant role in
developing the current product significantly [26]. The following figure highlights the prototype
of the electronic circuit board:

IOT-logistic and supply chain optimization-refill shelves Page 12 of 45
Figure: Prototype of the electric circuit board
(Source: 26)
This electrical circuit prototype will be applied to add an extra feature to the designed robot for
the logistics and supply chain optimization. Hence, the electrical and electronic system has been
used to develop an active control circuit. The developed prototype includes the following
components:
GPS sensor
Gyro sensor
Direction sensor
Hence, the design configuration of the electrical control will consider the following steps:
Figure: Prototype of the electric circuit board
(Source: 26)
This electrical circuit prototype will be applied to add an extra feature to the designed robot for
the logistics and supply chain optimization. Hence, the electrical and electronic system has been
used to develop an active control circuit. The developed prototype includes the following
components:
GPS sensor
Gyro sensor
Direction sensor
Hence, the design configuration of the electrical control will consider the following steps:
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 45
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.