ABB IRB140 Robot: DH Parameter Table and Kinematics Analysis
VerifiedAdded on 2022/11/25
|6
|546
|158
Project
AI Summary
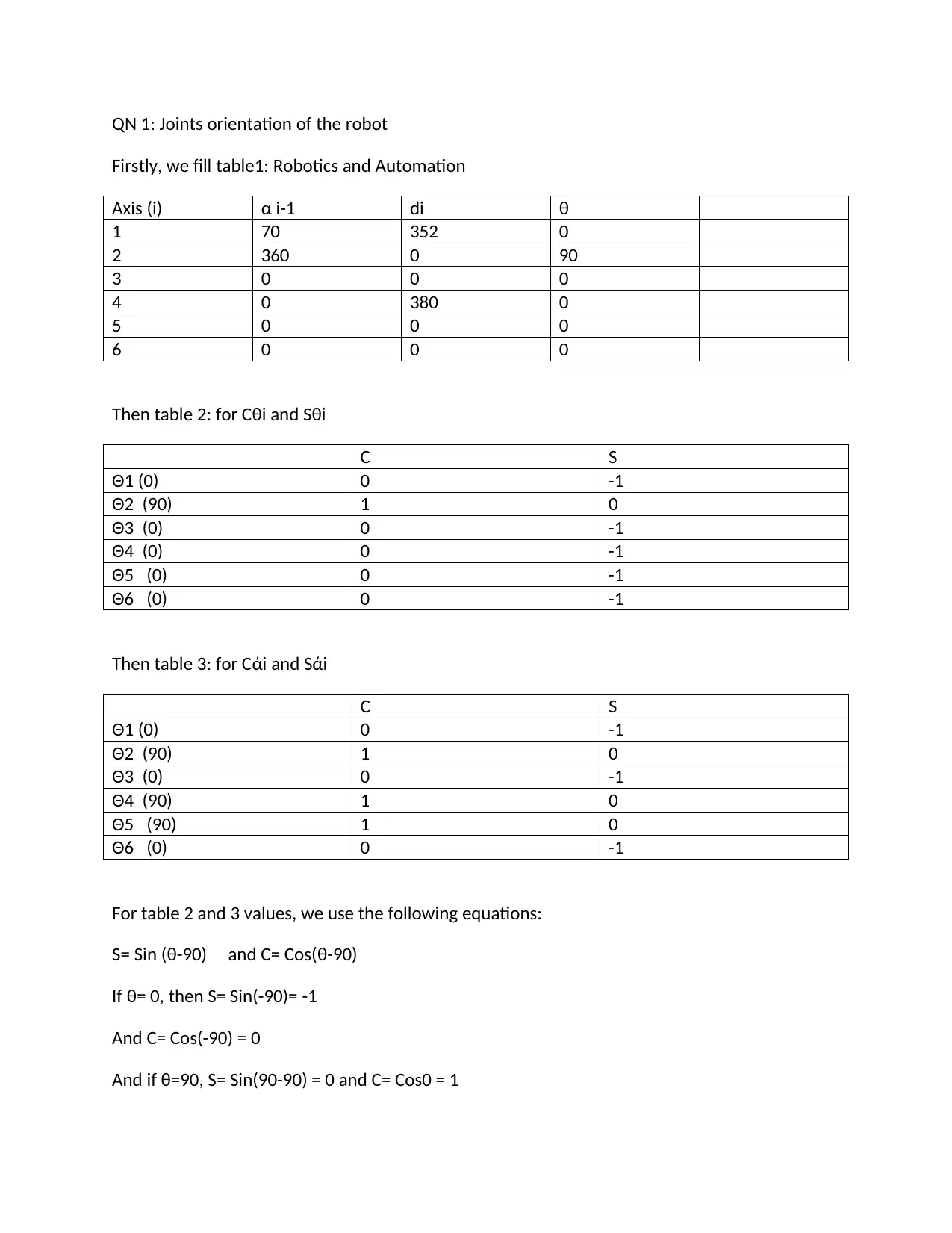
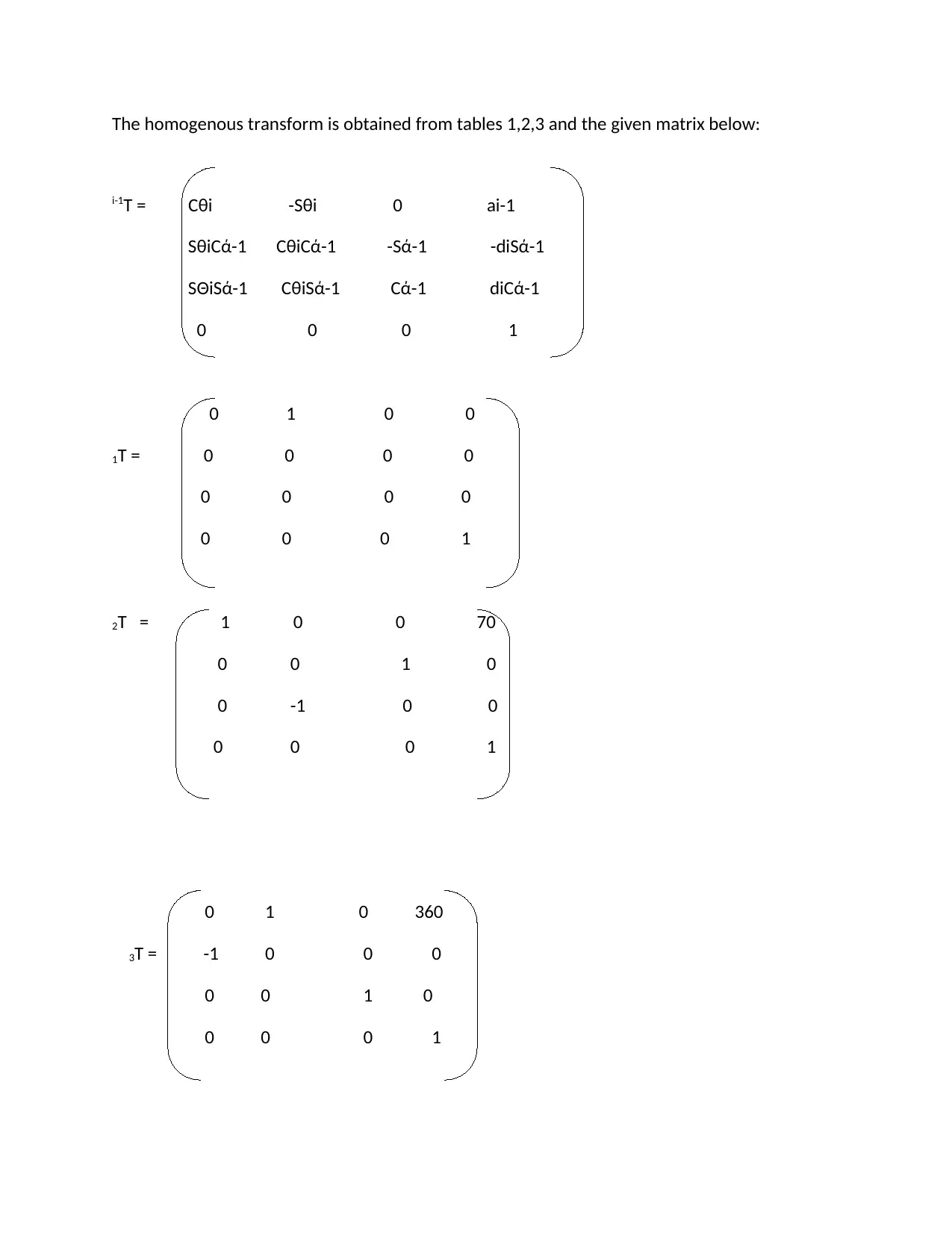
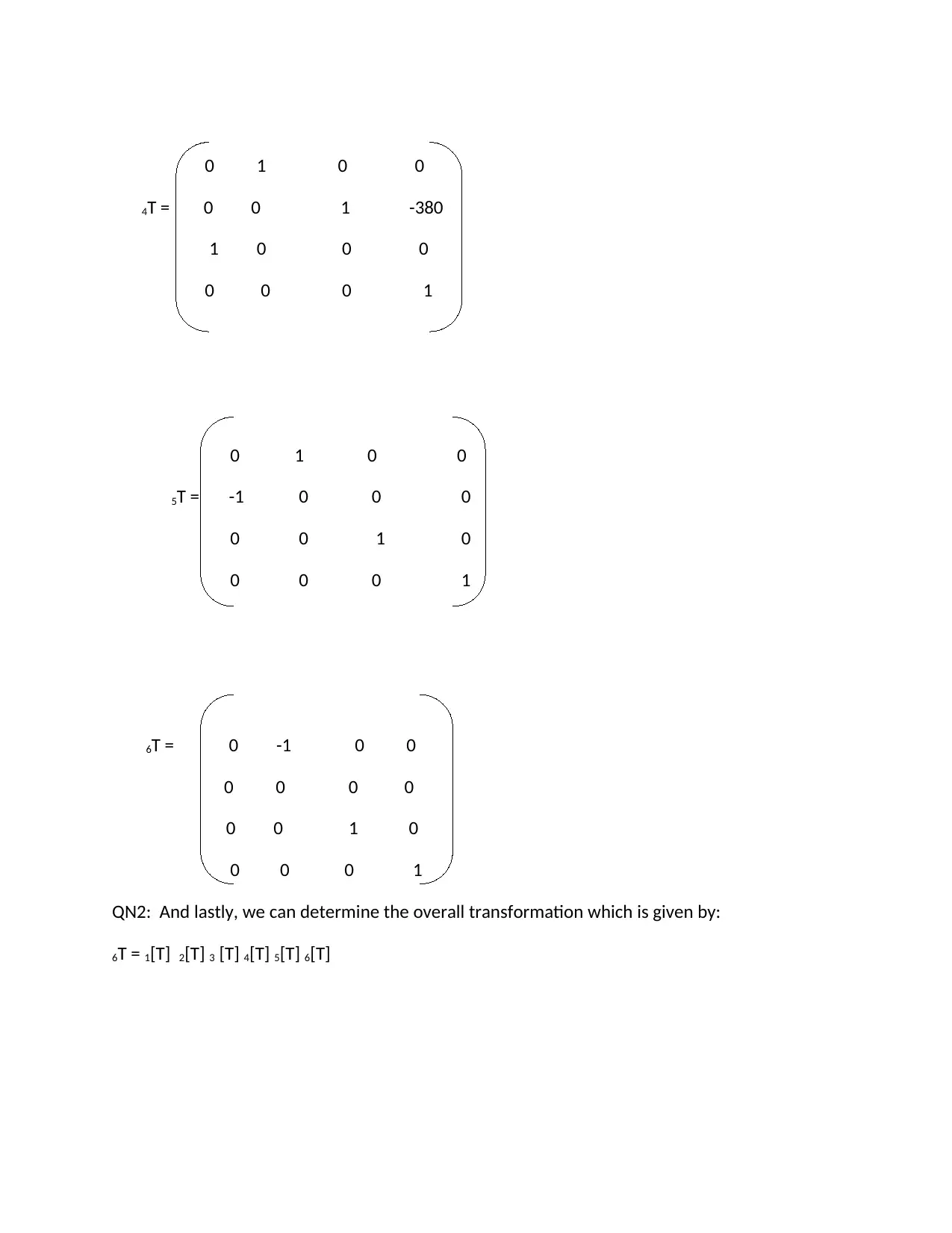
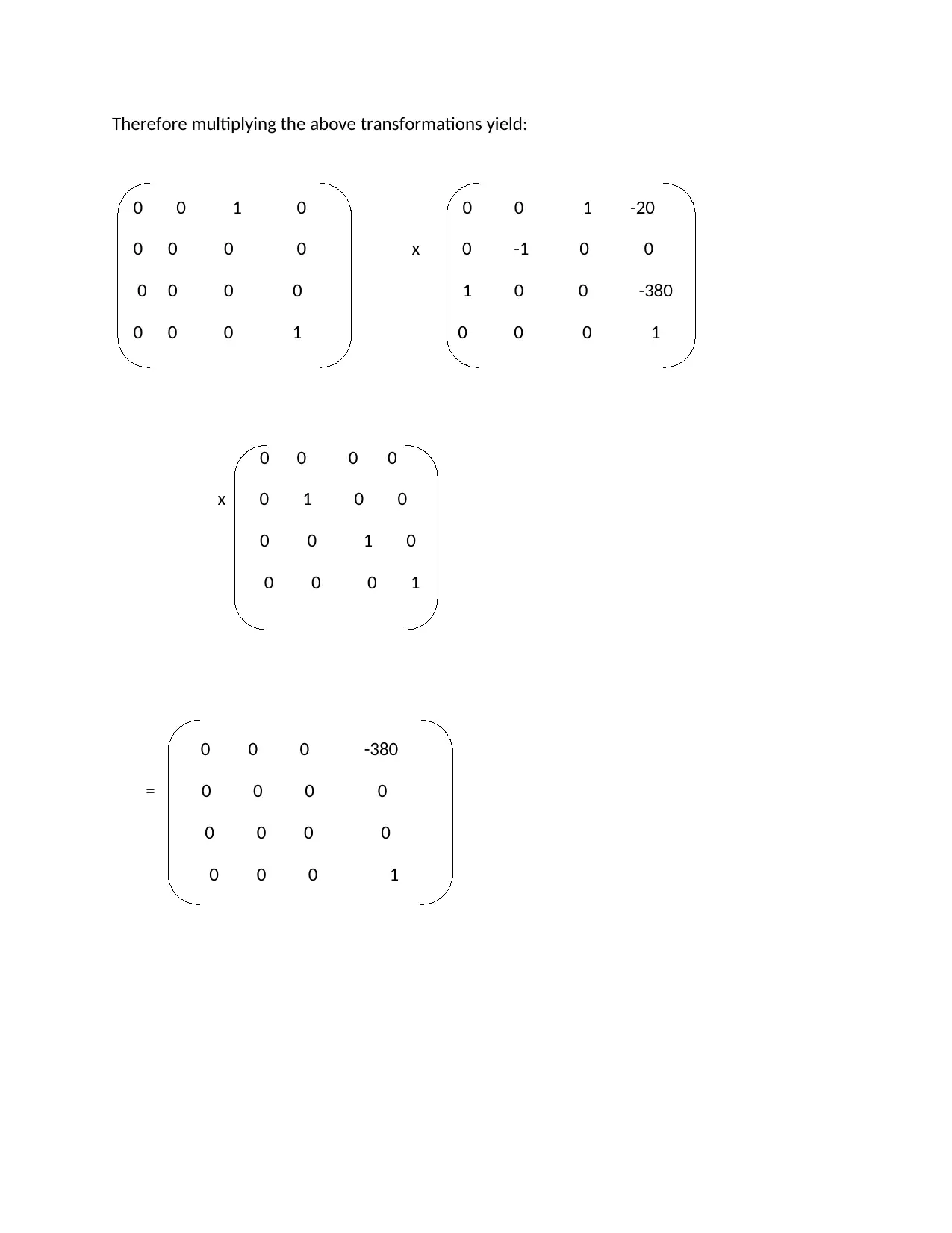
This project analyzes the kinematics of the ABB IRB140 robot, a common industrial manipulator. The solution begins by constructing a Denavit-Hartenberg (DH) parameter table to define the robot's link and joint characteristics, including axis orientations and offsets. Using the DH parameters, the individual transformation matrices for each link are derived. These matrices are then multiplied to obtain the overall homogeneous transformation matrix, which describes the position and orientation of the robot's end-effector relative to its base. The solution includes the calculation of the transformation matrices and the final overall transformation matrix. The forward kinematics solution yields the position and orientation of the robot's end-effector based on the joint angles.
1 out of 6


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.