Ad-hoc Vehicular Networks: Joint Communication and Radar Sensing
VerifiedAdded on 2023/06/10
|20
|4155
|457
Report
AI Summary
This report provides a comprehensive review of the advancements in joint communication and radar sensing technologies and their applications in developing ad-hoc vehicular networks. It discusses the evolution of vehicular networks (V2V, V2I, and V2P), cooperative communication strategies, and the role of radar sensing in enhancing safety and efficiency. The report also covers recent progress in Cooperative Vehicular Networking (CVN), including physical layer cooperation, MAC protocols, and forwarding mechanisms. It highlights the integration of radar sensors in Advanced Driver Assistance Systems (ADAS) and explores the architecture of radar sensing systems. The paper concludes by identifying key research areas and future directions for joint communication and radar sensing in vehicular networks, aiming to improve traffic management, road safety, and overall transportation efficiency. Desklib offers this report along with numerous other study resources.

JOINT COMMUNICATION AND RADAR SENCSING 1
Joint communication and radar sensing for the development of effective Ad-hoc
vehicular networks.
Student Name.
Course.
University of affiliation
Date.
Joint communication and radar sensing for the development of effective Ad-hoc
vehicular networks.
Student Name.
Course.
University of affiliation
Date.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
JOINT COMMUNICATION AND RADAR SENCSING 2
Table of contents.
List of tables:........................................................................................................................2
List of Figures:.....................................................................................................................2
Introduction..........................................................................................................................2
Vehicular Networks.............................................................................................................3
Cooperative Communication...............................................................................................3
Cooperative Vehicular Networking (CVN).........................................................................3
Figure 1- Image illustrating cooperative Networks in V2V Scenario.................................4
Figure 2- Image Illustrating Cooperative Communication Networks in V2I Scenario.......4
Figure 3- Image illustrating Cooperative Communication Networks in Advanced I2V
scenario............................................................................................................................................5
Table 1- Comparing CVN Solution on Basis of Objectives................................................5
Table 2- Detailed comparison of various CVN solutions....................................................5
Figure 4- illustration of a scenario for mmWave cooperative communication in vehicular
networks...........................................................................................................................................6
Figure 5- an automotive radar sensing system from Infineon Technologies.......................7
Radar sensing System architecture......................................................................................7
Figure 6- Channels in the AFE5401 Radar analog front end from Texas Instruments.......7
Joint Vehicular Communication-Radar System...................................................................7
Figure 7- Millimeter-Wave-Connected-Vehicles................................................................7
Table of contents.
List of tables:........................................................................................................................2
List of Figures:.....................................................................................................................2
Introduction..........................................................................................................................2
Vehicular Networks.............................................................................................................3
Cooperative Communication...............................................................................................3
Cooperative Vehicular Networking (CVN).........................................................................3
Figure 1- Image illustrating cooperative Networks in V2V Scenario.................................4
Figure 2- Image Illustrating Cooperative Communication Networks in V2I Scenario.......4
Figure 3- Image illustrating Cooperative Communication Networks in Advanced I2V
scenario............................................................................................................................................5
Table 1- Comparing CVN Solution on Basis of Objectives................................................5
Table 2- Detailed comparison of various CVN solutions....................................................5
Figure 4- illustration of a scenario for mmWave cooperative communication in vehicular
networks...........................................................................................................................................6
Figure 5- an automotive radar sensing system from Infineon Technologies.......................7
Radar sensing System architecture......................................................................................7
Figure 6- Channels in the AFE5401 Radar analog front end from Texas Instruments.......7
Joint Vehicular Communication-Radar System...................................................................7
Figure 7- Millimeter-Wave-Connected-Vehicles................................................................7
JOINT COMMUNICATION AND RADAR SENCSING 3
Conclusion...........................................................................................................................8
References............................................................................................................................9
List of tables:
List of Figures:
There has been an amazing evolvement of joint communication technology in the recent
past. This revolution has affected many economic sector including the transportation sectors. The
vehicular networking for instance is one of the areas where joint communication has largely been
employed in the recent past. This transformation though, has brought about a new contest in
understanding, implementing and improving the way the Join Vehicular Network operates.
This report gives a wide-ranging review of current advancements in the field of Joint
communication networks, the detector sensing and how both technologies can be used in the
development of an operational ad-hoc for the networking of vehicles. Among the features
discussed in this report is the physical, medium access control, the protocol employed in routing
processes and the scheduling and security aspects of the jointed communication and radar
sensing.
The classification of the effort that are manifested in various researches in organization
of joint network communication for vehicles is also discussed in this report. The most important
Conclusion...........................................................................................................................8
References............................................................................................................................9
List of tables:
List of Figures:
There has been an amazing evolvement of joint communication technology in the recent
past. This revolution has affected many economic sector including the transportation sectors. The
vehicular networking for instance is one of the areas where joint communication has largely been
employed in the recent past. This transformation though, has brought about a new contest in
understanding, implementing and improving the way the Join Vehicular Network operates.
This report gives a wide-ranging review of current advancements in the field of Joint
communication networks, the detector sensing and how both technologies can be used in the
development of an operational ad-hoc for the networking of vehicles. Among the features
discussed in this report is the physical, medium access control, the protocol employed in routing
processes and the scheduling and security aspects of the jointed communication and radar
sensing.
The classification of the effort that are manifested in various researches in organization
of joint network communication for vehicles is also discussed in this report. The most important
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
JOINT COMMUNICATION AND RADAR SENCSING 4
requirements for comprehending the dream of helpful vehicular networks are acknowledged and
discussed. In the later sections, there is a discussion of open tasks in enabling such networks.
Finally, paper ends by pointing out the important areas of research and what to focus on in
predicting the future of the joint communication and radar sensing for the development of ad-hoc
for the networking of vehicles.
Introduction.
The history of mankind is associated with countless inventions. Among all these
invention, the one that introduced mankind to a new way of viewing things, was the radio
invention. This invention brought about the emergent of various discoveries related to it.
Wireless systems that employ radio frequencies to communicate and detectors to sense are the
most ubiquitous and prominent among all the types. Besides the fact that these two use radio-
frequency and transceiver functional blocks in their operations, their design is totally different
since the beginning. In most cases, these two are separately and independently studied and
developed from each other.
However, this is not the case in development of some primitive applications for example,
in establishment of system fusion between the radar systems that provide secondary observation
or the case of radar systems that determine if the person identified is either a friend or an enemy.
In these cases, there is free exchange of information between the two from time to time.
However, at the time of transmission of this information to the interrogator, each of them does it
in an autonomous manner.
This paper however will give brief reviews and summarize the state of the architecture
for the current systems, give a description and debates on the systems that are used for
demonstration, give wide-ranging review of current advancements in the field of Joint
communication networks, the detector sensing and how both technologies can be used in the
development of operational ad-hoc for the networking of vehicles and highlights the various
challenges that are assumed to face the development of joint communication and radar sensing
networks and related applications in future.
requirements for comprehending the dream of helpful vehicular networks are acknowledged and
discussed. In the later sections, there is a discussion of open tasks in enabling such networks.
Finally, paper ends by pointing out the important areas of research and what to focus on in
predicting the future of the joint communication and radar sensing for the development of ad-hoc
for the networking of vehicles.
Introduction.
The history of mankind is associated with countless inventions. Among all these
invention, the one that introduced mankind to a new way of viewing things, was the radio
invention. This invention brought about the emergent of various discoveries related to it.
Wireless systems that employ radio frequencies to communicate and detectors to sense are the
most ubiquitous and prominent among all the types. Besides the fact that these two use radio-
frequency and transceiver functional blocks in their operations, their design is totally different
since the beginning. In most cases, these two are separately and independently studied and
developed from each other.
However, this is not the case in development of some primitive applications for example,
in establishment of system fusion between the radar systems that provide secondary observation
or the case of radar systems that determine if the person identified is either a friend or an enemy.
In these cases, there is free exchange of information between the two from time to time.
However, at the time of transmission of this information to the interrogator, each of them does it
in an autonomous manner.
This paper however will give brief reviews and summarize the state of the architecture
for the current systems, give a description and debates on the systems that are used for
demonstration, give wide-ranging review of current advancements in the field of Joint
communication networks, the detector sensing and how both technologies can be used in the
development of operational ad-hoc for the networking of vehicles and highlights the various
challenges that are assumed to face the development of joint communication and radar sensing
networks and related applications in future.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
JOINT COMMUNICATION AND RADAR SENCSING 5
Vehicular Networks.
The current innovations in in the wireless technologies, networking work associated with
the ad-hoc and motor engineering has resulted to the emergence of vehicular networks. These
networks are manifested in amongst cars in motion, RSUs and foot-travelers, who carry
communication gadgets with them, in their travels. These networks can be employed not only in
urban areas but also in countryside and freeway settings. These vehicular networks manifested in
three general forms, that is, Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I) and
finally, Vehicle-to-Pedestrians (V2P) scenarios (Kim 2013 pp. 145–148). In setting up these
networks, the often used technologies are those employ the functionalities of Dedicated Short-
Range Communications (DSRC), IEEE802.1 p and IEEE1609 standards, and Long-Term-
Evolution. In shaping the modern motor industries however, various technologies are used.
These technologies are discussed in the later stages of this report (Pasin 2015 pp. 208–215).
The evolution of technologies related to communication has led to the emergence of
various applications that seem promising in the vehicular networking sector. These application
are mainly focused on improving the safety in free roads, easing the management of traffics and
soft news, in the transportation sectors (Zhou 2012 pp. 1885–1889). Each of these applications
however, executes a diverse service requirement in terms of potential, dependability and quantity
in the system.
Cooperative Communication.
This is one of the most ubiquitous developing technologies. This technology is designed
in such a way that is able to use efficiently the available band through exploitation of the
wireless transmission benefit of signal eavesdropping as the signal travel from on point to
another. In other terms, cooperative communication the act of processing the information
acquired through eavesdropping of signals that are transferred to and from the adjacent nodes, to
produce a spatial range (Li 2014 pp. 2769–2773). This communication is therefore capable of
accomplishing a higher spatial range, increase in the data transmission rate, greater output, be
able to cope with the prevailing network conditions and minimized signal noise. Putting into
consideration the above mentioned values, cooperative communication is inevitable in the
Vehicular Networks.
The current innovations in in the wireless technologies, networking work associated with
the ad-hoc and motor engineering has resulted to the emergence of vehicular networks. These
networks are manifested in amongst cars in motion, RSUs and foot-travelers, who carry
communication gadgets with them, in their travels. These networks can be employed not only in
urban areas but also in countryside and freeway settings. These vehicular networks manifested in
three general forms, that is, Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I) and
finally, Vehicle-to-Pedestrians (V2P) scenarios (Kim 2013 pp. 145–148). In setting up these
networks, the often used technologies are those employ the functionalities of Dedicated Short-
Range Communications (DSRC), IEEE802.1 p and IEEE1609 standards, and Long-Term-
Evolution. In shaping the modern motor industries however, various technologies are used.
These technologies are discussed in the later stages of this report (Pasin 2015 pp. 208–215).
The evolution of technologies related to communication has led to the emergence of
various applications that seem promising in the vehicular networking sector. These application
are mainly focused on improving the safety in free roads, easing the management of traffics and
soft news, in the transportation sectors (Zhou 2012 pp. 1885–1889). Each of these applications
however, executes a diverse service requirement in terms of potential, dependability and quantity
in the system.
Cooperative Communication.
This is one of the most ubiquitous developing technologies. This technology is designed
in such a way that is able to use efficiently the available band through exploitation of the
wireless transmission benefit of signal eavesdropping as the signal travel from on point to
another. In other terms, cooperative communication the act of processing the information
acquired through eavesdropping of signals that are transferred to and from the adjacent nodes, to
produce a spatial range (Li 2014 pp. 2769–2773). This communication is therefore capable of
accomplishing a higher spatial range, increase in the data transmission rate, greater output, be
able to cope with the prevailing network conditions and minimized signal noise. Putting into
consideration the above mentioned values, cooperative communication is inevitable in the
JOINT COMMUNICATION AND RADAR SENCSING 6
process of enlightening the general operations of a vehicular network and developing vehicular-
related ad-hoc (Joshi 2015 pp. 114–117).
Cooperative Vehicular Networking (CVN)
In a similar way as other similar networks are seen as factor of that give contribution in the
improvement of vehicular networks, the CVN has enhanced some level of efficiency and
sufficiency in the functioning of vehicular networks. This communication enhances information
sharing among vehicle that are close to one another at different network layers, hence ensuring
the existence of compound broadcast, substitutes for strong communications (Zhou 2012 pp.
1885–1889). This cooperation can exist or rather can be established directly between vehicles or
through a wayside setup. The vehicular node that work in conjunction with the sender node in
enhancing the data transmission is called, relay node. This node has got the capability to work in
various approaches including, amplify and forward mode, decode and forward mode, compress
and forward mode and finally, store carry and forward mode.
The figures 1-3 below gives a brief elaboration of several approaches through which supportive
vehicular communication network manifest in the real world. These approaches include the cases
where a car can sense or rather detect a neighboring car which is experiencing failure in
transmission detection and offer it the necessary help, as illustrated in figure 1 below. A similar
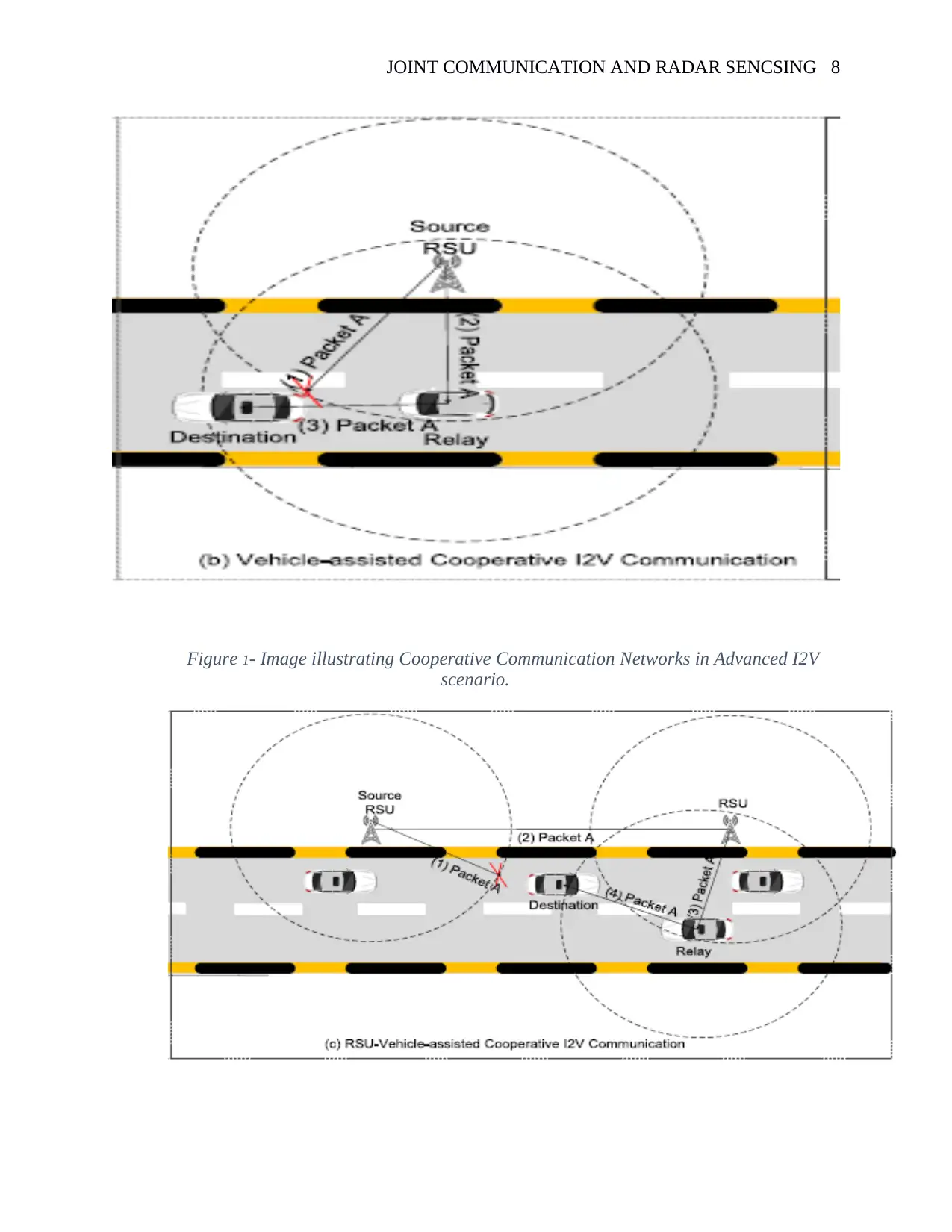
scenario is again manifested in situation where vehicle senses that some vehicles have gone past
the RSU range and therefore comes in and act as an intermediary between the vehicle involved
and the RSU, thus enhancing the relay of the packets to other vehicles (Va 2016). This is
illustrated in figure 2 below. Another case is where the RSU node cooperates with the vehicle
node or rather work in conjunction to relay a packet transmission failure for example in the case
where the RSU from the data source fails to transmit data successfully to the proper destination.
In this case, the RSU seeks help from the adjacent RSU along the path through the backhaul
bounded links. The recipient RSU then sends the failed packet received to the vehicle that is
closing to the targeted vehicle. The moving vehicle then transfers the intended packet to the
target when it’s in the range where transmission is possible (Joshi 2015 pp. 114–117). This is
further illustrated in the figure 3 below.
Figure 1- Image illustrating cooperative Networks in V2V Scenario
process of enlightening the general operations of a vehicular network and developing vehicular-
related ad-hoc (Joshi 2015 pp. 114–117).
Cooperative Vehicular Networking (CVN)
In a similar way as other similar networks are seen as factor of that give contribution in the
improvement of vehicular networks, the CVN has enhanced some level of efficiency and
sufficiency in the functioning of vehicular networks. This communication enhances information
sharing among vehicle that are close to one another at different network layers, hence ensuring
the existence of compound broadcast, substitutes for strong communications (Zhou 2012 pp.
1885–1889). This cooperation can exist or rather can be established directly between vehicles or
through a wayside setup. The vehicular node that work in conjunction with the sender node in
enhancing the data transmission is called, relay node. This node has got the capability to work in
various approaches including, amplify and forward mode, decode and forward mode, compress
and forward mode and finally, store carry and forward mode.
The figures 1-3 below gives a brief elaboration of several approaches through which supportive
vehicular communication network manifest in the real world. These approaches include the cases
where a car can sense or rather detect a neighboring car which is experiencing failure in
transmission detection and offer it the necessary help, as illustrated in figure 1 below. A similar
scenario is again manifested in situation where vehicle senses that some vehicles have gone past
the RSU range and therefore comes in and act as an intermediary between the vehicle involved
and the RSU, thus enhancing the relay of the packets to other vehicles (Va 2016). This is
illustrated in figure 2 below. Another case is where the RSU node cooperates with the vehicle
node or rather work in conjunction to relay a packet transmission failure for example in the case
where the RSU from the data source fails to transmit data successfully to the proper destination.
In this case, the RSU seeks help from the adjacent RSU along the path through the backhaul
bounded links. The recipient RSU then sends the failed packet received to the vehicle that is
closing to the targeted vehicle. The moving vehicle then transfers the intended packet to the
target when it’s in the range where transmission is possible (Joshi 2015 pp. 114–117). This is
further illustrated in the figure 3 below.
Figure 1- Image illustrating cooperative Networks in V2V Scenario
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide

JOINT COMMUNICATION AND RADAR SENCSING 7
Figure 1- Image Illustrating Cooperative Communication Networks in V2I Scenario
Figure 1- Image Illustrating Cooperative Communication Networks in V2I Scenario
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
JOINT COMMUNICATION AND RADAR SENCSING 8
Figure 1- Image illustrating Cooperative Communication Networks in Advanced I2V
scenario.
Figure 1- Image illustrating Cooperative Communication Networks in Advanced I2V
scenario.
JOINT COMMUNICATION AND RADAR SENCSING 9
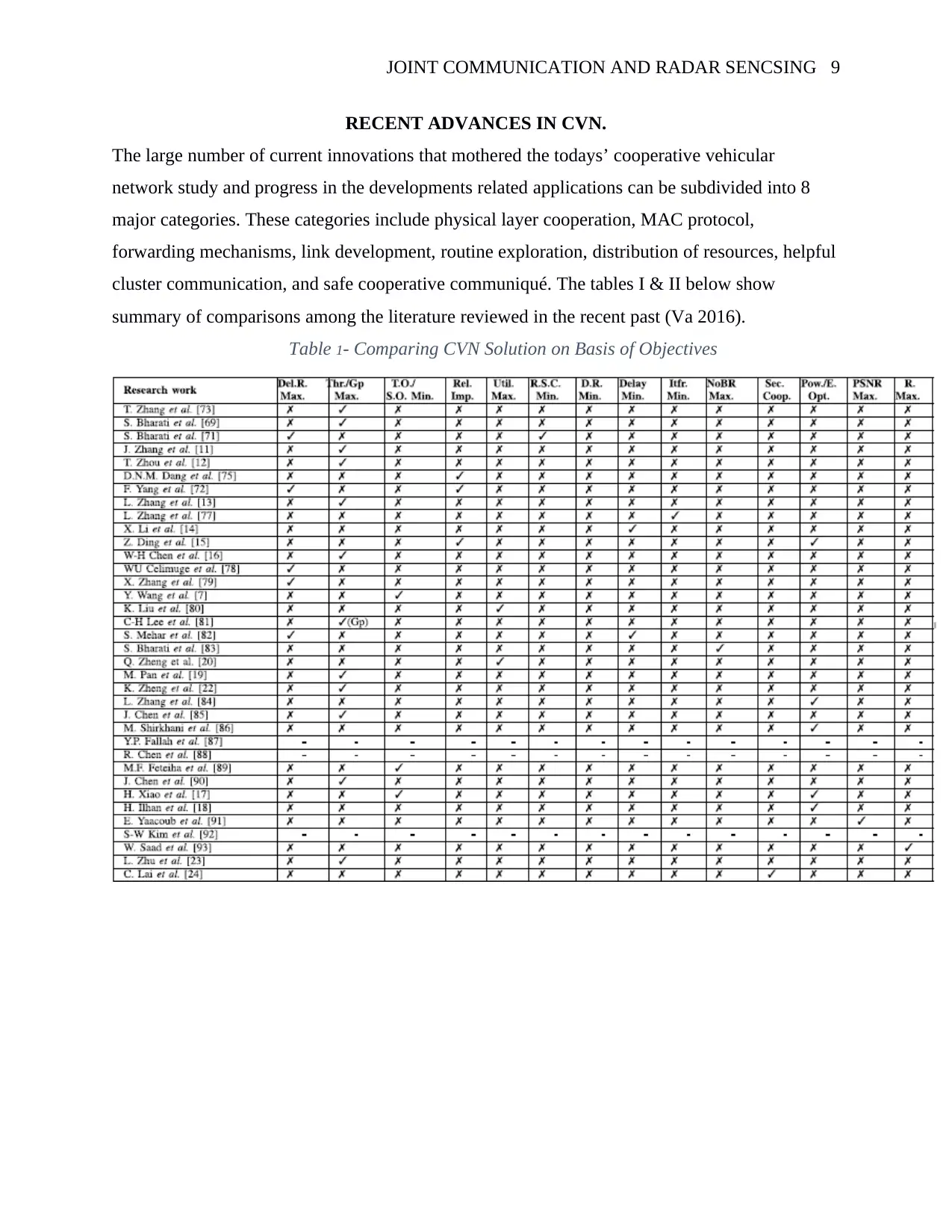
RECENT ADVANCES IN CVN.
The large number of current innovations that mothered the todays’ cooperative vehicular
network study and progress in the developments related applications can be subdivided into 8
major categories. These categories include physical layer cooperation, MAC protocol,
forwarding mechanisms, link development, routine exploration, distribution of resources, helpful
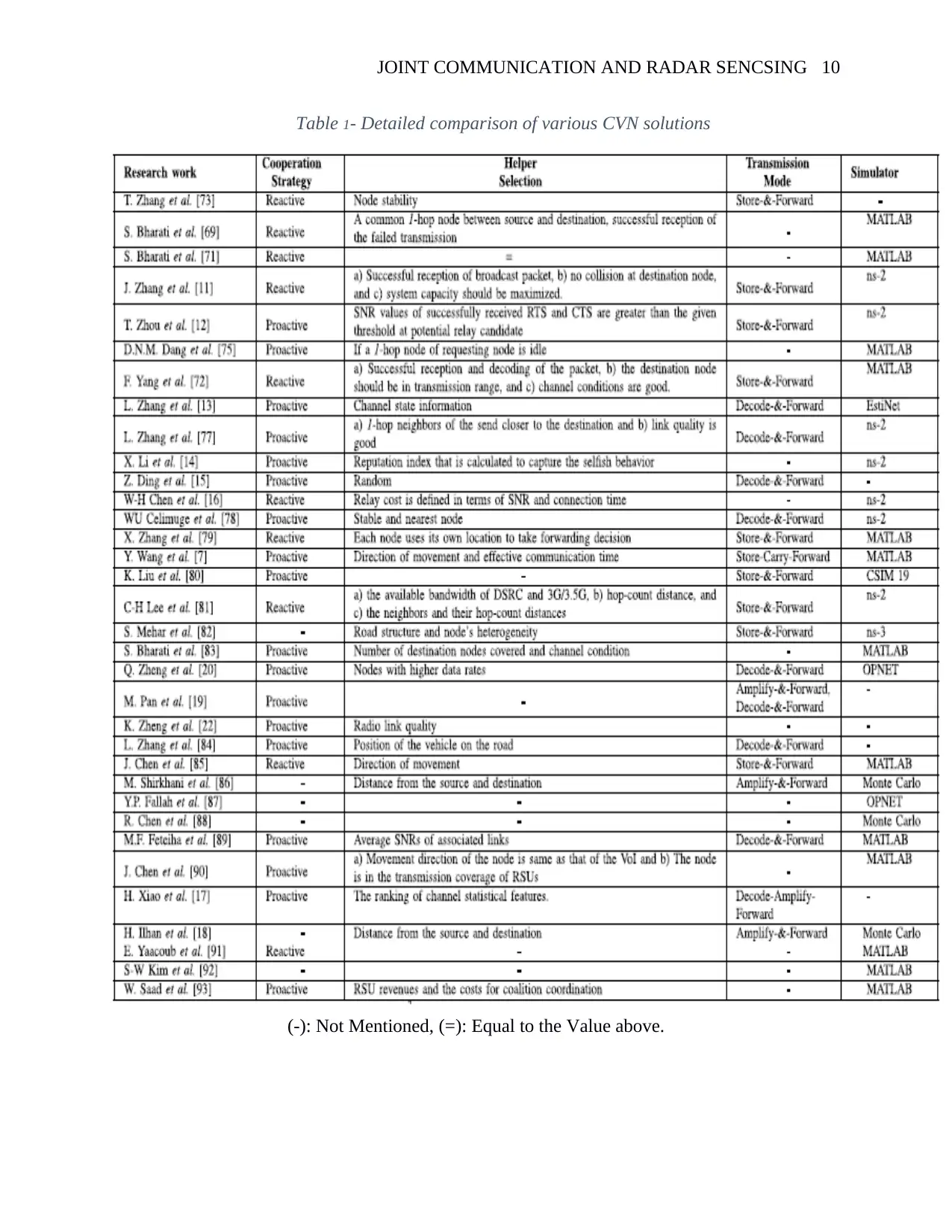
cluster communication, and safe cooperative communiqué. The tables I & II below show
summary of comparisons among the literature reviewed in the recent past (Va 2016).
Table 1- Comparing CVN Solution on Basis of Objectives
RECENT ADVANCES IN CVN.
The large number of current innovations that mothered the todays’ cooperative vehicular
network study and progress in the developments related applications can be subdivided into 8
major categories. These categories include physical layer cooperation, MAC protocol,
forwarding mechanisms, link development, routine exploration, distribution of resources, helpful
cluster communication, and safe cooperative communiqué. The tables I & II below show
summary of comparisons among the literature reviewed in the recent past (Va 2016).
Table 1- Comparing CVN Solution on Basis of Objectives
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
JOINT COMMUNICATION AND RADAR SENCSING 10
Table 1- Detailed comparison of various CVN solutions
(-): Not Mentioned, (=): Equal to the Value above.
Table 1- Detailed comparison of various CVN solutions
(-): Not Mentioned, (=): Equal to the Value above.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
JOINT COMMUNICATION AND RADAR SENCSING 11
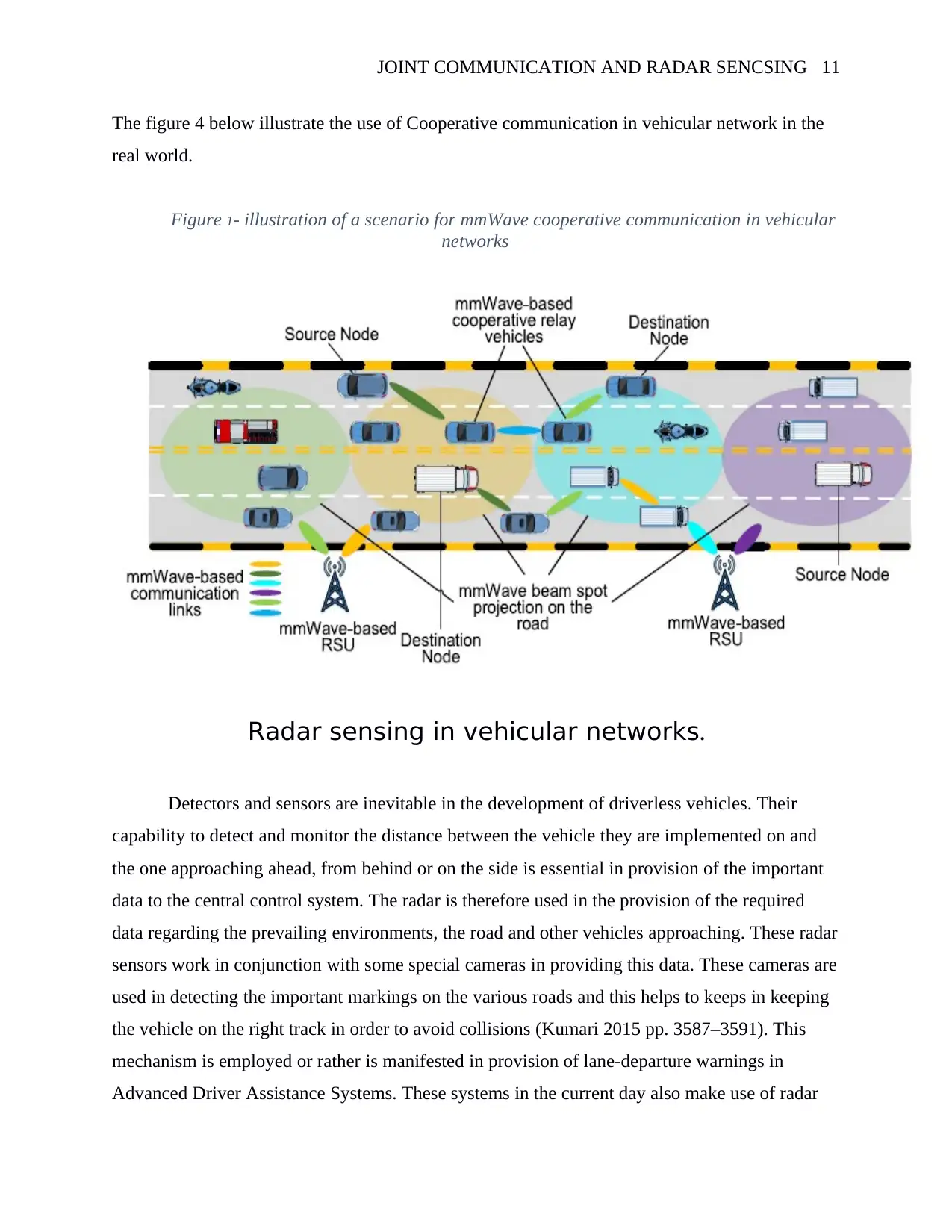
The figure 4 below illustrate the use of Cooperative communication in vehicular network in the
real world.
Figure 1- illustration of a scenario for mmWave cooperative communication in vehicular
networks
Radar sensing in vehicular networks.
Detectors and sensors are inevitable in the development of driverless vehicles. Their
capability to detect and monitor the distance between the vehicle they are implemented on and
the one approaching ahead, from behind or on the side is essential in provision of the important
data to the central control system. The radar is therefore used in the provision of the required
data regarding the prevailing environments, the road and other vehicles approaching. These radar
sensors work in conjunction with some special cameras in providing this data. These cameras are
used in detecting the important markings on the various roads and this helps to keeps in keeping
the vehicle on the right track in order to avoid collisions (Kumari 2015 pp. 3587–3591). This
mechanism is employed or rather is manifested in provision of lane-departure warnings in
Advanced Driver Assistance Systems. These systems in the current day also make use of radar
The figure 4 below illustrate the use of Cooperative communication in vehicular network in the
real world.
Figure 1- illustration of a scenario for mmWave cooperative communication in vehicular
networks
Radar sensing in vehicular networks.
Detectors and sensors are inevitable in the development of driverless vehicles. Their
capability to detect and monitor the distance between the vehicle they are implemented on and
the one approaching ahead, from behind or on the side is essential in provision of the important
data to the central control system. The radar is therefore used in the provision of the required
data regarding the prevailing environments, the road and other vehicles approaching. These radar
sensors work in conjunction with some special cameras in providing this data. These cameras are
used in detecting the important markings on the various roads and this helps to keeps in keeping
the vehicle on the right track in order to avoid collisions (Kumari 2015 pp. 3587–3591). This
mechanism is employed or rather is manifested in provision of lane-departure warnings in
Advanced Driver Assistance Systems. These systems in the current day also make use of radar
JOINT COMMUNICATION AND RADAR SENCSING 12
sensing mechanisms in detecting collisions, giving warnings and in adaptive tour mechanisms,
where vehicle can be guided by the one in front as it follows it.
In the recent past, there has been a noticeable drop in the prices of the 24GHz radar
sensors that used to be very expensive in the past. This is due to the increase in the adoption of
ADAS systems which are commonly used in the todays’ adaptive tour gearshifts and collision
recognition. This technology is now a days viewed as a major necessity that ought to be met in
the manufacturing of the modern vehicles, in order for the manufacturers to achieve the most
recent NCAP rating Europe. Despite the fact that ADAS is in the peak of its’ evolvement, the
radar sensing mechanism can never be abandoned since it forms the basis on which ADAS
systems are built. Advanced radar sensors have most ubiquitous and prominent capabilities. For
example, the BGT24M 24GHz radar sensor from Infineon Technologies is often used in
conjunction with an external microcontroller in an ECU in adjustment of the throttle to ensure an
unchanging space between the car its’ implemented on and the one in front (Kumari 2015 pp.
3587–3591). The commonly adapted range of the distance to be maintained is that of 20 m. the
figure below elaborate this scenario.
sensing mechanisms in detecting collisions, giving warnings and in adaptive tour mechanisms,
where vehicle can be guided by the one in front as it follows it.
In the recent past, there has been a noticeable drop in the prices of the 24GHz radar
sensors that used to be very expensive in the past. This is due to the increase in the adoption of
ADAS systems which are commonly used in the todays’ adaptive tour gearshifts and collision
recognition. This technology is now a days viewed as a major necessity that ought to be met in
the manufacturing of the modern vehicles, in order for the manufacturers to achieve the most
recent NCAP rating Europe. Despite the fact that ADAS is in the peak of its’ evolvement, the
radar sensing mechanism can never be abandoned since it forms the basis on which ADAS
systems are built. Advanced radar sensors have most ubiquitous and prominent capabilities. For
example, the BGT24M 24GHz radar sensor from Infineon Technologies is often used in
conjunction with an external microcontroller in an ECU in adjustment of the throttle to ensure an
unchanging space between the car its’ implemented on and the one in front (Kumari 2015 pp.
3587–3591). The commonly adapted range of the distance to be maintained is that of 20 m. the
figure below elaborate this scenario.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 20

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.