Mechanical Engineering Project: Joystick Controlled Steering Mechanism
VerifiedAdded on 2020/05/03
|10
|3413
|479
Project
AI Summary
This project report analyzes a joystick-controlled steering mechanism vehicle, focusing on its application for handicapped individuals. The report begins with an executive summary and an introduction to the project, highlighting the use of a smart steering system and the goal of reducing steering effort. A literature review covers existing research on similar systems, followed by the research questions, aims, objectives, and sub-goals. The methodology section details the theoretical content, including electric power steering mechanisms and calculations. The experimental setup involves a driving simulator, and the results and outcomes are discussed in terms of their relevance. The report also includes project planning with a Gantt chart and concludes with references.

Running head: ENGINEERING PROJECT PREPARATION
Joystick Controlled Steering Mechanism Vehicle
Name of the Student:
Name of the University:
Joystick Controlled Steering Mechanism Vehicle
Name of the Student:
Name of the University:
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
ENGINEERING PROJECT PREPARATION
Table of Contents
Executive Summary..................................................................................................................2
1. Introduction..............................................................................................................................2
2. State-of-the-art/Literature Review............................................................................................2
3. Research Question, Aim/Objectives and Sub-goals................................................................3
3.1 Research questions.............................................................................................................3
3.2 Research aims and sub-goals..............................................................................................3
3.3 Research objectives............................................................................................................4
4. Theoretical Content/Methodology............................................................................................4
5. Experimental Set-up.................................................................................................................5
6. Results, Outcome and Relevance.............................................................................................5
7. Project Planning and Gantt Chart.............................................................................................6
8. Conclusions..............................................................................................................................7
9. References................................................................................................................................8
Table of Contents
Executive Summary..................................................................................................................2
1. Introduction..............................................................................................................................2
2. State-of-the-art/Literature Review............................................................................................2
3. Research Question, Aim/Objectives and Sub-goals................................................................3
3.1 Research questions.............................................................................................................3
3.2 Research aims and sub-goals..............................................................................................3
3.3 Research objectives............................................................................................................4
4. Theoretical Content/Methodology............................................................................................4
5. Experimental Set-up.................................................................................................................5
6. Results, Outcome and Relevance.............................................................................................5
7. Project Planning and Gantt Chart.............................................................................................6
8. Conclusions..............................................................................................................................7
9. References................................................................................................................................8
ENGINEERING PROJECT PREPARATION
Joystick Controlled Steering Mechanism Vehicle
Executive Summary
The purpose of this paper is to analyze joystick controlled steering mechanism vehicle. The
vehicle is utilized of precise steering system framework which allows to control properly. Motor
is such a device which is used to convert of electrical energy into the mechanical energy such as
rotation of shaft at the output level. A stepper motor is used to convert of electrical signals into
impulses into rotational angle. The speed of motor is dependent on the frequency of the impulse.
Higher value of the speed of rotation is resulted into lower torque of the stepper motor. The value
is associated with assessment of the current intensity. Modification into the wheel chair for the
disabled persons is one of the best ways to reduce effort to operate the wheel chair. The main
purpose is to reduce the effort of the steering so that handicapped persons can easily drive their
wheel chair.
1. Introduction
In this particular paper, a robotic vehicle with a steering mechanism is being proposed. The
vehicles are used of smart steering system which permits to steer with effortlessness. The steering
mechanism builds smart use of motors to attain the movement of vehicle into further backward
and rotating left or right. The steering system utilizes of joystick to control the movement of
vehicle by means of RF transmission (Saha et al. 2015). The main focus of this project is to
lessen effort of driving for the handicapped person.
The project study is based on analyzing a steering mechanism for the disabled people those are
facing problems while driving cars. Literature part reviews the work that has already carried out
by other researchers. The research is based on identified questions and objectives to meet with
study requirements. Theoretical approaches are also analyzed used for collect information for this
study. Experimental set up is done and their results and outcome are analyzed to meet project
aims. Proper planning is done to deliver work in 8 weeks.
2. State-of-the-art/Literature Review
Zheng, Hu and Yang (2016) described that there are people those are not do their day-to-day
activities due to disability, therefore they are used of wheelchair that is automated and required
less time. It is done by providing joystick to them which is displaced by the user towards the
direction they want to go. When the steering motion of wheel is being replaced by joystick, then
it becomes easily and effortless to drive (Bowman et al. 2015). The steering wheel is being
replaced by assembly of the joystick, electric motor as well as gear box. It provides signal to
control unit that is forwarded to the motor. The torque of the motor is being magnified by gear
box and its output is being interconnected with the steering column. Rosenberg (2017) stated that
when the user wants to move from one place to another, then he pointed to the location where
they desire to move and the wheel chair positions towards the location automatically. Riefe and
Schulz (2017) argued that the joystick manages rate of change of the steering angle in its place of
straightforwardly change the angle of steering. By making a displacement of the joystick at a
Joystick Controlled Steering Mechanism Vehicle
Executive Summary
The purpose of this paper is to analyze joystick controlled steering mechanism vehicle. The
vehicle is utilized of precise steering system framework which allows to control properly. Motor
is such a device which is used to convert of electrical energy into the mechanical energy such as
rotation of shaft at the output level. A stepper motor is used to convert of electrical signals into
impulses into rotational angle. The speed of motor is dependent on the frequency of the impulse.
Higher value of the speed of rotation is resulted into lower torque of the stepper motor. The value
is associated with assessment of the current intensity. Modification into the wheel chair for the
disabled persons is one of the best ways to reduce effort to operate the wheel chair. The main
purpose is to reduce the effort of the steering so that handicapped persons can easily drive their
wheel chair.
1. Introduction
In this particular paper, a robotic vehicle with a steering mechanism is being proposed. The
vehicles are used of smart steering system which permits to steer with effortlessness. The steering
mechanism builds smart use of motors to attain the movement of vehicle into further backward
and rotating left or right. The steering system utilizes of joystick to control the movement of
vehicle by means of RF transmission (Saha et al. 2015). The main focus of this project is to
lessen effort of driving for the handicapped person.
The project study is based on analyzing a steering mechanism for the disabled people those are
facing problems while driving cars. Literature part reviews the work that has already carried out
by other researchers. The research is based on identified questions and objectives to meet with
study requirements. Theoretical approaches are also analyzed used for collect information for this
study. Experimental set up is done and their results and outcome are analyzed to meet project
aims. Proper planning is done to deliver work in 8 weeks.
2. State-of-the-art/Literature Review
Zheng, Hu and Yang (2016) described that there are people those are not do their day-to-day
activities due to disability, therefore they are used of wheelchair that is automated and required
less time. It is done by providing joystick to them which is displaced by the user towards the
direction they want to go. When the steering motion of wheel is being replaced by joystick, then
it becomes easily and effortless to drive (Bowman et al. 2015). The steering wheel is being
replaced by assembly of the joystick, electric motor as well as gear box. It provides signal to
control unit that is forwarded to the motor. The torque of the motor is being magnified by gear
box and its output is being interconnected with the steering column. Rosenberg (2017) stated that
when the user wants to move from one place to another, then he pointed to the location where
they desire to move and the wheel chair positions towards the location automatically. Riefe and
Schulz (2017) argued that the joystick manages rate of change of the steering angle in its place of
straightforwardly change the angle of steering. By making a displacement of the joystick at a
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide

ENGINEERING PROJECT PREPARATION
constant rate, the steering angle is increased continuously. The joystick brings to origin that is at
center place, and then there is a change into steering angle.
Naboulsi (2017) cited that in order to get highest steering deviation, the joystick is hold away
from the center for longer time. The key significant advantage of this system is to attain
sensitivity for controlling over larger range of dislocation of the joystick. The conventional
steering system is performed as power system for the handicapped people (Choromanski,
Grabarek & Kozłowski 2015). Two types of joystick are used for this particular project work.
Directional interface is needed to map of particular directions of the movement of vehicle on the
controller. Subrt, Zhu and Kolstad (2014) stated that into analog joystick, there is no variable
output. It states that when the user pressed the button, then maximum output is get. Gil et al.
(2013) argued that into resistance joystick, the lever is being fixed at single point based on ball
and socket joint that provides lever its two degree of the freedom. This joystick is based on
resistance phenomenon. When there is variation of resistance, then a variable output is get. Kim
and Kim (2016) stated that among the two types of joystick, resistance joystick is considered as
most compatible into this steering system, therefore resistance joystick is selected.
Miyamoto et al. (2014) demonstrated that steering system is used of joystick for controlling the
movement of vehicle with use of RF transmission. The receiver circuit of the steering system
includes of RF receiver which is connected to the microcontroller circuit in order to read the RF
commands. Microcontroller is used to process the commands and operate the motor for achieving
desired movement of the vehicle. Moazzam et al. (2016) stated that the servo arrangement is
being constructed for achieving steering control while the dc motors are being used to achieve of
the movement of the motion. Therefore, steering mechanism vehicle is operated with use of RF
joystick remote that is operated wirelessly (Sanders 2017). While use of the joystick, the
developer ensures that the wheels of the device are pointed towards desired direction of the
motion. Schmalfub et al. (2016) argued that it converts rotary motion of steering to angular turn
of wheel.
3. Research Question, Aim/Objectives and Sub-goals
3.1 Research questions
Following are the research questions:
1. Does the steering system using joystick reduce effort for the disabled persons?
2. Does resistance joystick is compatible for steering system?
3.2 Research aims and sub-goals
The aim of this research study is to provide the handicapped persons with steering system that is
useful for them to drive their wheelchair. The proposed system also provides comfort to the
driver as it reduces steering effort. By elimination of the steering wheel as well as column, the
hazards are being overcome for the handicapped people from making any type of accidents. In
order to complete the project study, following are the aims of the research:
Determine the type of joystick used for the robotic vehicle with a steering mechanism
Determine the rate of change of the steering angle which is controlled by the joystick
constant rate, the steering angle is increased continuously. The joystick brings to origin that is at
center place, and then there is a change into steering angle.
Naboulsi (2017) cited that in order to get highest steering deviation, the joystick is hold away
from the center for longer time. The key significant advantage of this system is to attain
sensitivity for controlling over larger range of dislocation of the joystick. The conventional
steering system is performed as power system for the handicapped people (Choromanski,
Grabarek & Kozłowski 2015). Two types of joystick are used for this particular project work.
Directional interface is needed to map of particular directions of the movement of vehicle on the
controller. Subrt, Zhu and Kolstad (2014) stated that into analog joystick, there is no variable
output. It states that when the user pressed the button, then maximum output is get. Gil et al.
(2013) argued that into resistance joystick, the lever is being fixed at single point based on ball
and socket joint that provides lever its two degree of the freedom. This joystick is based on
resistance phenomenon. When there is variation of resistance, then a variable output is get. Kim
and Kim (2016) stated that among the two types of joystick, resistance joystick is considered as
most compatible into this steering system, therefore resistance joystick is selected.
Miyamoto et al. (2014) demonstrated that steering system is used of joystick for controlling the
movement of vehicle with use of RF transmission. The receiver circuit of the steering system
includes of RF receiver which is connected to the microcontroller circuit in order to read the RF
commands. Microcontroller is used to process the commands and operate the motor for achieving
desired movement of the vehicle. Moazzam et al. (2016) stated that the servo arrangement is
being constructed for achieving steering control while the dc motors are being used to achieve of
the movement of the motion. Therefore, steering mechanism vehicle is operated with use of RF
joystick remote that is operated wirelessly (Sanders 2017). While use of the joystick, the
developer ensures that the wheels of the device are pointed towards desired direction of the
motion. Schmalfub et al. (2016) argued that it converts rotary motion of steering to angular turn
of wheel.
3. Research Question, Aim/Objectives and Sub-goals
3.1 Research questions
Following are the research questions:
1. Does the steering system using joystick reduce effort for the disabled persons?
2. Does resistance joystick is compatible for steering system?
3.2 Research aims and sub-goals
The aim of this research study is to provide the handicapped persons with steering system that is
useful for them to drive their wheelchair. The proposed system also provides comfort to the
driver as it reduces steering effort. By elimination of the steering wheel as well as column, the
hazards are being overcome for the handicapped people from making any type of accidents. In
order to complete the project study, following are the aims of the research:
Determine the type of joystick used for the robotic vehicle with a steering mechanism
Determine the rate of change of the steering angle which is controlled by the joystick
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
ENGINEERING PROJECT PREPARATION
Evaluation on reduction of effort for the handicapped people while they are driving wheel
chair
3.3 Research objectives
Following are the research objectives of this particular study:
To reduce of the effort of steering
To convert the steering system into power steering system
To drive the car effectively by the handicapped persons
4. Theoretical Content/Methodology
Electric power steering mechanism
The selected project topic is analyzed by use of secondary data which is collected from the peer
review journal article, magazines and others. At first, the researcher studied and analyzed
working of the steering mechanism of the automobile steering system (Dols 2016). They studied
different types of papers which are published in mechanical engineering field. Based on the
selected research design such as descriptive design, it is easy to analyze minimum effort which is
required for steering system of the automobile (Faria, Reis & Lau 2014). Using this research
design, it aims to gain details of the events that are occurred with providing of detailed
description of selected topic. This design process defines detailed information on selected topic.
The researcher selected proper research materials for the unit components and studied different
type of properties of it (Kim & Kim 2016). The proposed system performed trial in addition to
analyze it. A conventional steering system is being analyzed with development of the steering
system for benefit of handicapped person as it controls the direction of vehicle with turning the
wheels of the steering (Zheng, Hu & Yang 2016). The proposed system is working based on
principle of electric power steering system. It consists of torque and ultrasonic sensor and
actuator.
Bean strength and wrar strength
After analyzing of various research papers, the researcher performed some of the calculation to
perform the study. The researcher calculates the values of spur gear as well as pinion pair for a
gear ratio of 3. Bean strength is calculated as: σb = (sut) / 3 and wrar strength is calculated as: dp =
m* Zp. Into the steering system, joystick, motor as well as microcontroller is considered as the
critical components for the system (Choromański, Grabarek & Kozłowski 2015). Those
identified components have major control and version required for proposed system to function it
properly. The joystick is the input of the microcontroller and it is considered as main control for
the system. In this particular study, microcontroller is determining signal by means of joystick as
compared to a level which is termed as look up table value (Subrt, Zhu & Kolstad 2014). It
provides with proper voltage level towards the motor. The motor is being attached towards the
motor which support bracket. It is attached with the steering column of vehicle via use of
machined motor adapter that is bolted to steering shaft.
Evaluation on reduction of effort for the handicapped people while they are driving wheel
chair
3.3 Research objectives
Following are the research objectives of this particular study:
To reduce of the effort of steering
To convert the steering system into power steering system
To drive the car effectively by the handicapped persons
4. Theoretical Content/Methodology
Electric power steering mechanism
The selected project topic is analyzed by use of secondary data which is collected from the peer
review journal article, magazines and others. At first, the researcher studied and analyzed
working of the steering mechanism of the automobile steering system (Dols 2016). They studied
different types of papers which are published in mechanical engineering field. Based on the
selected research design such as descriptive design, it is easy to analyze minimum effort which is
required for steering system of the automobile (Faria, Reis & Lau 2014). Using this research
design, it aims to gain details of the events that are occurred with providing of detailed
description of selected topic. This design process defines detailed information on selected topic.
The researcher selected proper research materials for the unit components and studied different
type of properties of it (Kim & Kim 2016). The proposed system performed trial in addition to
analyze it. A conventional steering system is being analyzed with development of the steering
system for benefit of handicapped person as it controls the direction of vehicle with turning the
wheels of the steering (Zheng, Hu & Yang 2016). The proposed system is working based on
principle of electric power steering system. It consists of torque and ultrasonic sensor and
actuator.
Bean strength and wrar strength
After analyzing of various research papers, the researcher performed some of the calculation to
perform the study. The researcher calculates the values of spur gear as well as pinion pair for a
gear ratio of 3. Bean strength is calculated as: σb = (sut) / 3 and wrar strength is calculated as: dp =
m* Zp. Into the steering system, joystick, motor as well as microcontroller is considered as the
critical components for the system (Choromański, Grabarek & Kozłowski 2015). Those
identified components have major control and version required for proposed system to function it
properly. The joystick is the input of the microcontroller and it is considered as main control for
the system. In this particular study, microcontroller is determining signal by means of joystick as
compared to a level which is termed as look up table value (Subrt, Zhu & Kolstad 2014). It
provides with proper voltage level towards the motor. The motor is being attached towards the
motor which support bracket. It is attached with the steering column of vehicle via use of
machined motor adapter that is bolted to steering shaft.
ENGINEERING PROJECT PREPARATION
Hypothesis
Hypothesis for the research study:
Research Question Hypothesis
1. Does the steering system using joystick
reduce effort for the disabled persons?
H1: The steering system reduces the effort of
the disabled persons when the steering is
replaced by joystick.
2. Does resistance joystick is compatible for
steering system?
H2: Resistance joystick is highly compatible
for the steering system.
5. Experimental Set-up
Driving simulator experiment
A driving simulator experiments is being conducted in order to investigate the design features of
the joystick system which is used to control the vehicle parts such as accelerator, brake with
steering (Strenge, Sieburg & Schmidt 2016). The design of joystick is developed and tested by
two factors: degree of interference among lateral and longitudinal control followed by feedback
from the driver. The handicapped people are participated into the experiment those are paralyzed
in the legs and most of them have degraded function in arms as well as hands. A driving
simulator is used to investigate the properties of driver (Faria, Reis & Lau 2014). It consists of
virtual reality display which offers with projected image of the path of road, torque feedback
steering vehicle with essential sensors and vehicle model running into real time.
Steer angle and driver torque measurements
“Electrical power steering” hardware gives with steer angle as well as driver torque
measurements. It is sent towards the vehicle model with use of controller area network bus. The
proposed model returns the torque demand signal to “Electrical power steering” in order to
suggest of the steering feel (Schmalfub et al. 2016).
Calculations
Simulator is made of use of MATLAB as well as toolbox such as Simulink and virtual reality.
The model of the vehicle is being implemented with use of Simulink. Basically, this experiment
is conducted with a purpose to study effects due to increased experiences with the joysticks
(Choromański, Grabarek & Kozłowski 2015). The drivers are used of right hand in order to
control accelerator as well as brake.
6. Results, Outcome and Relevance
Joystick drive system enables the handicapped people for driving the car by hand with seating on
an electrical wheelchair. The operation of joystick is towards back and front direction with
acceleration of the car while the car is on left as well as right direction turns the steering wheel
Hypothesis
Hypothesis for the research study:
Research Question Hypothesis
1. Does the steering system using joystick
reduce effort for the disabled persons?
H1: The steering system reduces the effort of
the disabled persons when the steering is
replaced by joystick.
2. Does resistance joystick is compatible for
steering system?
H2: Resistance joystick is highly compatible
for the steering system.
5. Experimental Set-up
Driving simulator experiment
A driving simulator experiments is being conducted in order to investigate the design features of
the joystick system which is used to control the vehicle parts such as accelerator, brake with
steering (Strenge, Sieburg & Schmidt 2016). The design of joystick is developed and tested by
two factors: degree of interference among lateral and longitudinal control followed by feedback
from the driver. The handicapped people are participated into the experiment those are paralyzed
in the legs and most of them have degraded function in arms as well as hands. A driving
simulator is used to investigate the properties of driver (Faria, Reis & Lau 2014). It consists of
virtual reality display which offers with projected image of the path of road, torque feedback
steering vehicle with essential sensors and vehicle model running into real time.
Steer angle and driver torque measurements
“Electrical power steering” hardware gives with steer angle as well as driver torque
measurements. It is sent towards the vehicle model with use of controller area network bus. The
proposed model returns the torque demand signal to “Electrical power steering” in order to
suggest of the steering feel (Schmalfub et al. 2016).
Calculations
Simulator is made of use of MATLAB as well as toolbox such as Simulink and virtual reality.
The model of the vehicle is being implemented with use of Simulink. Basically, this experiment
is conducted with a purpose to study effects due to increased experiences with the joysticks
(Choromański, Grabarek & Kozłowski 2015). The drivers are used of right hand in order to
control accelerator as well as brake.
6. Results, Outcome and Relevance
Joystick drive system enables the handicapped people for driving the car by hand with seating on
an electrical wheelchair. The operation of joystick is towards back and front direction with
acceleration of the car while the car is on left as well as right direction turns the steering wheel
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
ENGINEERING PROJECT PREPARATION
(Riefe & Schulz 2017). The handicapped person is not required to change the seat from
wheelchair to car seat. When the system is fault, maintenance of the system is required by
moving gas as well as brake pedals by means of mechanical linkage that is connected to the lever
of joystick. Steering wheel is being turned by electric motor that is controlled by microcontroller
system (Saha et al. 2015). It is analyzed that steering angle is used to track reference angle
provided by the joystick. In order to understand the joystick drive system with wheelchair
seating, steering drive mechanism is being designed that consists of DC motor, potentiometer for
detection of angle and gears for purpose of transmission. Most of the cars are equipped with
power steering system that will reduce steering operational power of the human drivers
(Miyamoto et al. 2014). Therefore, the proposed system is utilized of power steering system to
appreciate the joystick car drive system with least capacity of the motor. A type of prototype
mechanism is being mounted on cockpit of the car of real van and it is tested dependability of the
projected joystick controlled wheelchair system.
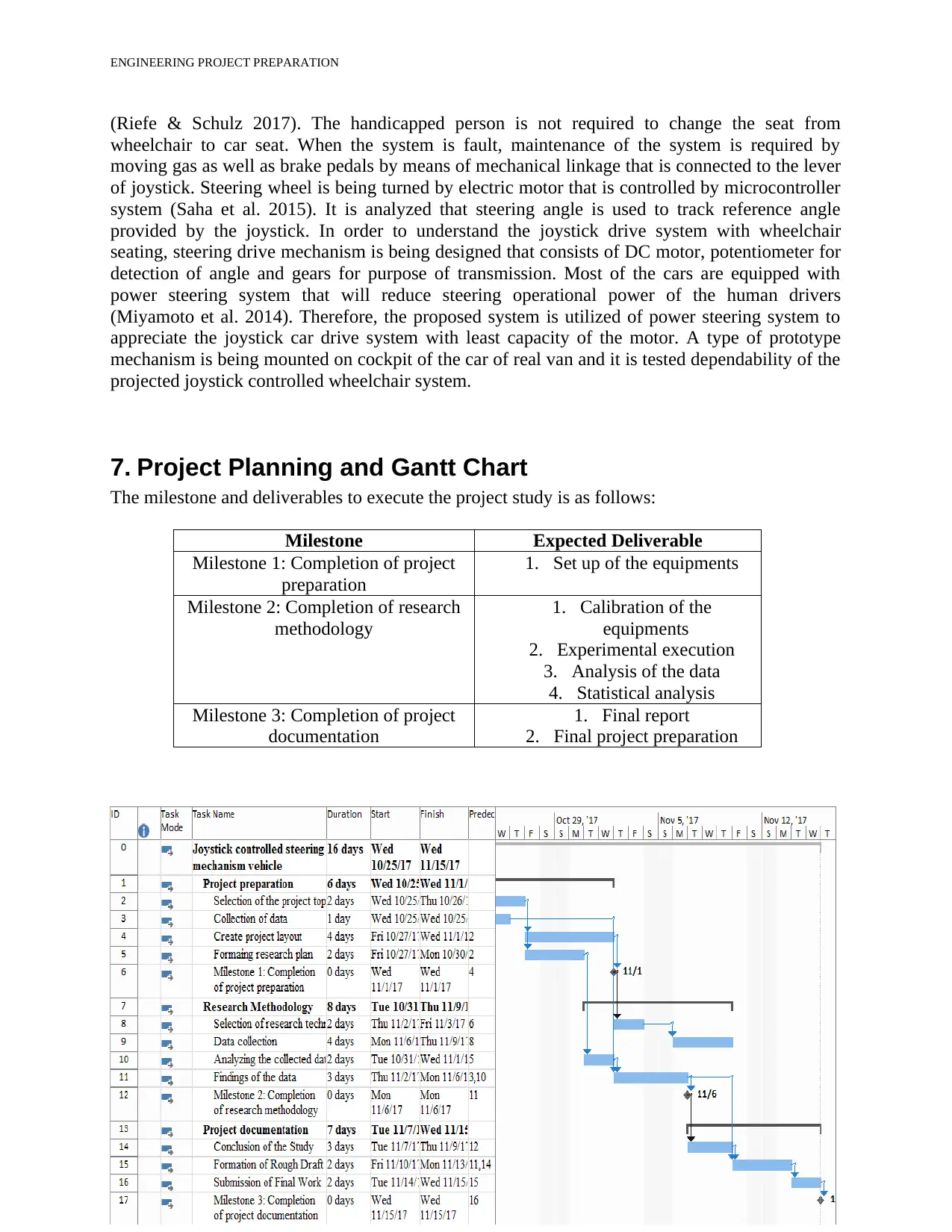
7. Project Planning and Gantt Chart
The milestone and deliverables to execute the project study is as follows:
Milestone Expected Deliverable
Milestone 1: Completion of project
preparation
1. Set up of the equipments
Milestone 2: Completion of research
methodology
1. Calibration of the
equipments
2. Experimental execution
3. Analysis of the data
4. Statistical analysis
Milestone 3: Completion of project
documentation
1. Final report
2. Final project preparation
(Riefe & Schulz 2017). The handicapped person is not required to change the seat from
wheelchair to car seat. When the system is fault, maintenance of the system is required by
moving gas as well as brake pedals by means of mechanical linkage that is connected to the lever
of joystick. Steering wheel is being turned by electric motor that is controlled by microcontroller
system (Saha et al. 2015). It is analyzed that steering angle is used to track reference angle
provided by the joystick. In order to understand the joystick drive system with wheelchair
seating, steering drive mechanism is being designed that consists of DC motor, potentiometer for
detection of angle and gears for purpose of transmission. Most of the cars are equipped with
power steering system that will reduce steering operational power of the human drivers
(Miyamoto et al. 2014). Therefore, the proposed system is utilized of power steering system to
appreciate the joystick car drive system with least capacity of the motor. A type of prototype
mechanism is being mounted on cockpit of the car of real van and it is tested dependability of the
projected joystick controlled wheelchair system.
7. Project Planning and Gantt Chart
The milestone and deliverables to execute the project study is as follows:
Milestone Expected Deliverable
Milestone 1: Completion of project
preparation
1. Set up of the equipments
Milestone 2: Completion of research
methodology
1. Calibration of the
equipments
2. Experimental execution
3. Analysis of the data
4. Statistical analysis
Milestone 3: Completion of project
documentation
1. Final report
2. Final project preparation
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

ENGINEERING PROJECT PREPARATION
Figure 1: Gantt chart
(Source: Created by author)
8. Conclusions
It is concluded that the handicapped person have less strength in the hand so as to drive the car.
Conventional steering system has provided power to the person so that they can drive the car. It is
also analyzed that using the joystick in the steering will eliminate the effort which is required
among the man to drive. The proposed system is installed into the car as a secondary system.
Dependency of the handicapped person on other is also reduced by means of utilizing the
proposed joystick system. The purpose of this study is to provide control to the vehicle
throughout joystick for the physically handicapped. It is required to response to operation of
joystick that is accounted for steering, acceleration as well as braking patterns that is considered
as natural for the human brain. The first consideration that is provided for accommodation
through the control system is interface of human with steering operations of vehicle.
Figure 1: Gantt chart
(Source: Created by author)
8. Conclusions
It is concluded that the handicapped person have less strength in the hand so as to drive the car.
Conventional steering system has provided power to the person so that they can drive the car. It is
also analyzed that using the joystick in the steering will eliminate the effort which is required
among the man to drive. The proposed system is installed into the car as a secondary system.
Dependency of the handicapped person on other is also reduced by means of utilizing the
proposed joystick system. The purpose of this study is to provide control to the vehicle
throughout joystick for the physically handicapped. It is required to response to operation of
joystick that is accounted for steering, acceleration as well as braking patterns that is considered
as natural for the human brain. The first consideration that is provided for accommodation
through the control system is interface of human with steering operations of vehicle.
ENGINEERING PROJECT PREPARATION
9. References
Bowman, J., Waller, T., Chin, T. & Polzin, J., Deere & Company, 2015. Method and apparatus
for ride control activation. U.S. Patent 9,055,719.
Choromański, W., Grabarek, I. & Kozłowski, M., 2015. Simulation and experimental study of
selected parameters of the multifunction steering wheel in the view of users’ abilities and
accuracy of vehicle maneuvers. Procedia Manufacturing, 3, pp.3085-3091.
Crombez, D.S., Ford Global Technologies, Llc, 2015. Vehicle control system and method. U.S.
Patent 8,942,889.
Dols, J.F., 2016. Towards a safer fitness to drive and driving ability assessment procedure with
joystick. In 17th International Conference Road Safety On Five Continents (RS5C 2016), Rio de
Janeiro, Brazil, 17-19 May 2016. Statens väg-och transportforskningsinstitut.
Faria, B.M., Reis, L.P. & Lau, N., 2014. A survey on intelligent wheelchair prototypes and
simulators. In New Perspectives in Information Systems and Technologies, Volume 1 (pp. 545-
557). Springer, Cham.
Gil, J.J., Díaz, I., Ciáurriz, P. & Echeverría, M., 2013. New driving control system with haptic
feedback: Design and preliminary validation tests. Transportation research part C: emerging
technologies, 33, pp.22-36.
Kim, Y. & Kim, Y., 2016. Driving Performance of Adaptive Driving Controls using Drive-by-
Wire Technology for People with Disabilities. Journal of the Ergonomics Society of
Korea, 35(1).
Miyamoto, H., Nabekura, K., Okajima, H. & Matsunaga, N., 2014, August. Steering control of
piggyback type wheelchair using avoidance intension detected by weight shift. In Advanced
Mechatronic Systems (ICAMechS), 2014 International Conference on (pp. 330-335). IEEE.
Moazzam, H., Farooq, U., Rafiq, F., Asad, M.U. & Abbas, G., 2016, August. Design and
construction of mobility assistive hybrid automobile for impaired persons. In Innovative
Computing Technology (INTECH), 2016 Sixth International Conference on(pp. 150-154). IEEE.
Naboulsi, M.A., Act-Ip, 2017. Safety control system for apps in vehicles. U.S. Patent 9,713,994.
Riefe, R.K. & Schulz, J.F., STEERING SOLUTIONS IP HOLDING CORPORATION,
2017. STEERING SYSTEM FOR AUTONOMOUS VEHICLE. U.S. Patent 20,170,293,306.
Rosenberg, L.B., Immersion Corporation, 2017. Haptic remote control for toys. U.S. Patent
9,625,905.
9. References
Bowman, J., Waller, T., Chin, T. & Polzin, J., Deere & Company, 2015. Method and apparatus
for ride control activation. U.S. Patent 9,055,719.
Choromański, W., Grabarek, I. & Kozłowski, M., 2015. Simulation and experimental study of
selected parameters of the multifunction steering wheel in the view of users’ abilities and
accuracy of vehicle maneuvers. Procedia Manufacturing, 3, pp.3085-3091.
Crombez, D.S., Ford Global Technologies, Llc, 2015. Vehicle control system and method. U.S.
Patent 8,942,889.
Dols, J.F., 2016. Towards a safer fitness to drive and driving ability assessment procedure with
joystick. In 17th International Conference Road Safety On Five Continents (RS5C 2016), Rio de
Janeiro, Brazil, 17-19 May 2016. Statens väg-och transportforskningsinstitut.
Faria, B.M., Reis, L.P. & Lau, N., 2014. A survey on intelligent wheelchair prototypes and
simulators. In New Perspectives in Information Systems and Technologies, Volume 1 (pp. 545-
557). Springer, Cham.
Gil, J.J., Díaz, I., Ciáurriz, P. & Echeverría, M., 2013. New driving control system with haptic
feedback: Design and preliminary validation tests. Transportation research part C: emerging
technologies, 33, pp.22-36.
Kim, Y. & Kim, Y., 2016. Driving Performance of Adaptive Driving Controls using Drive-by-
Wire Technology for People with Disabilities. Journal of the Ergonomics Society of
Korea, 35(1).
Miyamoto, H., Nabekura, K., Okajima, H. & Matsunaga, N., 2014, August. Steering control of
piggyback type wheelchair using avoidance intension detected by weight shift. In Advanced
Mechatronic Systems (ICAMechS), 2014 International Conference on (pp. 330-335). IEEE.
Moazzam, H., Farooq, U., Rafiq, F., Asad, M.U. & Abbas, G., 2016, August. Design and
construction of mobility assistive hybrid automobile for impaired persons. In Innovative
Computing Technology (INTECH), 2016 Sixth International Conference on(pp. 150-154). IEEE.
Naboulsi, M.A., Act-Ip, 2017. Safety control system for apps in vehicles. U.S. Patent 9,713,994.
Riefe, R.K. & Schulz, J.F., STEERING SOLUTIONS IP HOLDING CORPORATION,
2017. STEERING SYSTEM FOR AUTONOMOUS VEHICLE. U.S. Patent 20,170,293,306.
Rosenberg, L.B., Immersion Corporation, 2017. Haptic remote control for toys. U.S. Patent
9,625,905.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
ENGINEERING PROJECT PREPARATION
Saha, C., Goswami, D., Saha, S., Konar, A., Lekova, A. & Nagar, A.K., 2015, August. A novel
gesture driven fuzzy interface system for car racing game. In Fuzzy Systems (FUZZ-IEEE), 2015
IEEE International Conference on (pp. 1-8). IEEE.
Sanders, D.A., 2017. Using self-reliance factors to decide how to share control between human
powered wheelchair drivers and ultrasonic sensors. IEEE Transactions on Neural Systems and
Rehabilitation Engineering, 25(8), pp.1221-1229.
Schmalfub, L., Rupp, R., Tuga, M.R., Kogut, A., Hewitt, M., Meincke, J., Klinker, F.,
Duttenhoefer, W., Eck, U., Mikut, R. & Reischl, M., 2016. Steer by ear: Myoelectric auricular
control of powered wheelchairs for individuals with spinal cord injury. Restorative neurology and
neuroscience, 34(1), pp.79-95.
Strenge, B., Sieburg, S. & Schmidt, L., 2016. Experimental comparison of sidestick steering
configurations for an innovative electric two-wheel vehicle. In Advances in Ergonomic Design of
Systems, Products and Processes (pp. 313-326). Springer Berlin Heidelberg.
Subrt, M.C., Zhu, Y. & Kolstad, O.C., Caterpillar Inc., 2014. Articulation control system having
steering path tracking. U.S. Patent 8,807,261.
Zheng, H., Hu, J. & Yang, S., 2016. Variable steering ratio design for vehicle steer-by-wire
system with joystick (No. 2016-01-0455). SAE Technical Paper.
Saha, C., Goswami, D., Saha, S., Konar, A., Lekova, A. & Nagar, A.K., 2015, August. A novel
gesture driven fuzzy interface system for car racing game. In Fuzzy Systems (FUZZ-IEEE), 2015
IEEE International Conference on (pp. 1-8). IEEE.
Sanders, D.A., 2017. Using self-reliance factors to decide how to share control between human
powered wheelchair drivers and ultrasonic sensors. IEEE Transactions on Neural Systems and
Rehabilitation Engineering, 25(8), pp.1221-1229.
Schmalfub, L., Rupp, R., Tuga, M.R., Kogut, A., Hewitt, M., Meincke, J., Klinker, F.,
Duttenhoefer, W., Eck, U., Mikut, R. & Reischl, M., 2016. Steer by ear: Myoelectric auricular
control of powered wheelchairs for individuals with spinal cord injury. Restorative neurology and
neuroscience, 34(1), pp.79-95.
Strenge, B., Sieburg, S. & Schmidt, L., 2016. Experimental comparison of sidestick steering
configurations for an innovative electric two-wheel vehicle. In Advances in Ergonomic Design of
Systems, Products and Processes (pp. 313-326). Springer Berlin Heidelberg.
Subrt, M.C., Zhu, Y. & Kolstad, O.C., Caterpillar Inc., 2014. Articulation control system having
steering path tracking. U.S. Patent 8,807,261.
Zheng, H., Hu, J. & Yang, S., 2016. Variable steering ratio design for vehicle steer-by-wire
system with joystick (No. 2016-01-0455). SAE Technical Paper.
1 out of 10
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.